基于GPS-RTK的海上打樁遠程監控系統設計
2014-08-25 01:19:33林吉兆謝義林賈登科
測繪工程 2014年12期
楊 帆,林吉兆,謝義林,賈登科
(1.中交第四航務工程勘察設計院有限責任公司,廣東 廣州 510230;2.南京水利科學研究院,江蘇 南京 210029)
基于GPS-RTK的海上打樁遠程監控系統設計
楊 帆1,林吉兆1,謝義林2,賈登科1
(1.中交第四航務工程勘察設計院有限責任公司,廣東 廣州 510230;2.南京水利科學研究院,江蘇 南京 210029)
討論海上打樁遠程監控系統開發的意義,闡述GPS-RTK智能打樁系統結構和原理,提出海上打樁遠程監控系統方案,利用數據無線傳輸技術和數據庫存貯技術等計算機科學技術開發出一套智能化的遠程監控系統。實現遠程查看項目當前工作狀態和工作質量、生成工程報表、遠程控制等功能,已應用于江蘇某海上打樁項目中,保障了項目順利進行,為類似工程提供借鑒。
海上打樁;GPS-RTK;遠程監控;數據傳輸;數據庫
近年來,我國海洋事業大力發展,打樁定位在一些水運碼頭、港口、跨海橋梁工程的建設過程中是必不可少的一個重要環節[1-2]。當前海上打樁測量定位方法日益成熟,基于GPS-RTK多傳感器集成樁位定位系統集成化程度較高,當系統發生故障時,往往需要專家親臨現場找出系統故障原因,不僅浪費人力物力,還影響施工進度。同時上級領導需直接了解項目進展情況時,往往親自前往施工現場,不利于公司的統籌規劃和質量把握。
現如今,物聯網掀起了世界信息產業的第三次浪潮[2]。我國許多機構和單位也做了大量的技術研發和應用工作。為了滿足物聯網建設發展,國內電信運營商已成功實現我國移動數據通信產業由2G到3G的飛躍[3-4]。網絡熱點覆蓋范圍廣和網絡速度快為物聯網的發展提供了契機。
本文設計的遠程監控系統在充分滿足用戶需求前提下,結合2G網絡速率慢、資費低和3G網絡速率快、資費高的特點,將遠程監控系統分為基于GPRS單片機的遠程監視系統和基于3G網路的遠程控制系統兩部分。其中,基于GPRS單片機的遠程監視系統提供日常數據采集,發送入庫、數據處理分析以及用戶訪問等功能,作為主體部分進行設計開發;基于3G網路的遠程控制系統是將打樁船現場控制中心接入3G網絡后用遠程控制軟件實現遠程協助服務功能,遠程控制軟件與常規遠程控制軟件無異。本文將詳細介紹基于GPRS單片機的遠程監視系統的原理和設計開發。
1 GPS-RTK智能打樁定位系統
目前,海上打樁系統主要是基于GPS-RTK技術實現的智能打樁系統,主要設備有在陸地的GPS基準站接收機和電臺發射器;船上的3臺GPS流動站接收機、橫向傾斜儀、縱向傾斜儀和兩個測距儀。硬件設備安放參考位置如圖1所示。
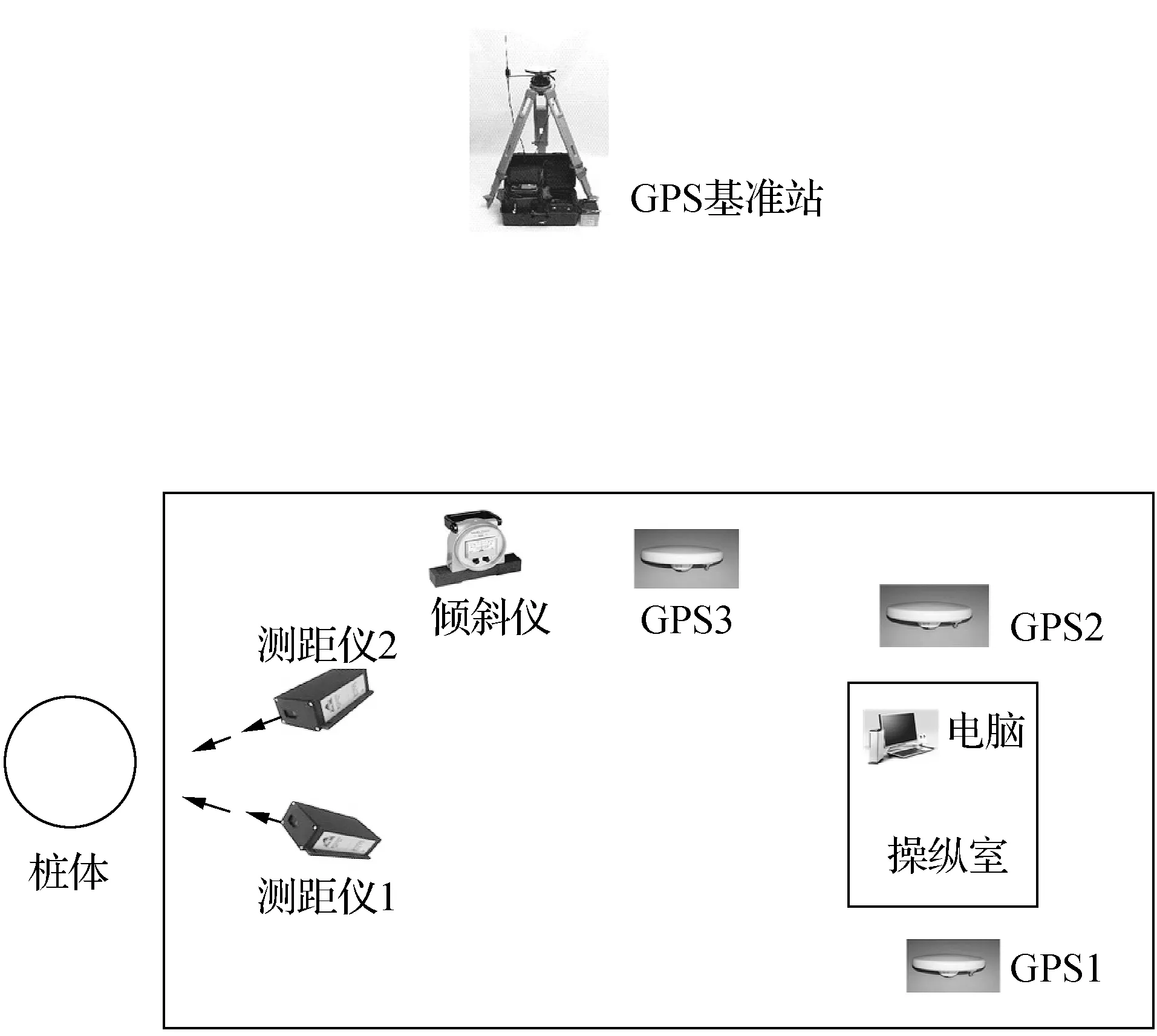
圖1 海上打樁系統硬件設備位置
該打樁測量定位系統對船體的控制采用3臺GPS儀器,目的是在控制船位的同時,控制船體橫、縱搖擺的傾斜量。在數學模型中,對因船體姿態的變化所引起的定位計算誤差加以改正,提高對樁位的定位精度。
整個海上打樁基本流程為移船、定位、開始打樁和結束打樁4個步驟。在打樁過程,由于重錘一直猛烈地錘擊樁體,因此使用GPS定位時,無法使用GPS定位儀對樁身直接進行定位。定位系統采用分級控制形式。首先將安裝在船體上的GPS設備對船體進行RTK定位[5-6];其次再以船體作為已知參照物,用安裝在船體前端適宜位置上的免棱鏡激光測距儀對樁身位置進行測定,并用傾斜儀測量船體姿態;最后利用這些測量數據通過串口線發送至控制室的電腦主機進行計算,從而間接得到樁體的測量坐標,使系統的測量精度達到厘米級。
2 監控系統架構和設計
基于GPRS單片機的遠程監控系統從功能上可以分為3個組成部分,即現場監控部分、服務器部分和客戶端遠程訪問部分。遠程監控系統數據傳輸整體流程如圖2所示,現場監控部分負責將GPS、測距儀、傾斜儀等傳感器數據進行采集和解算,并將解算結果和工程屬性信息等通過GPRS網絡傳輸至內陸服務器;服務器部分負責接收數據的讀取、分割、存貯并供用戶訪問提取;客戶端遠程訪問部分負責獲取用戶操作從而訪問數據庫并提取對應數據,將數據進行報表生成、繪圖以及模擬動畫形式呈現于用戶面前。
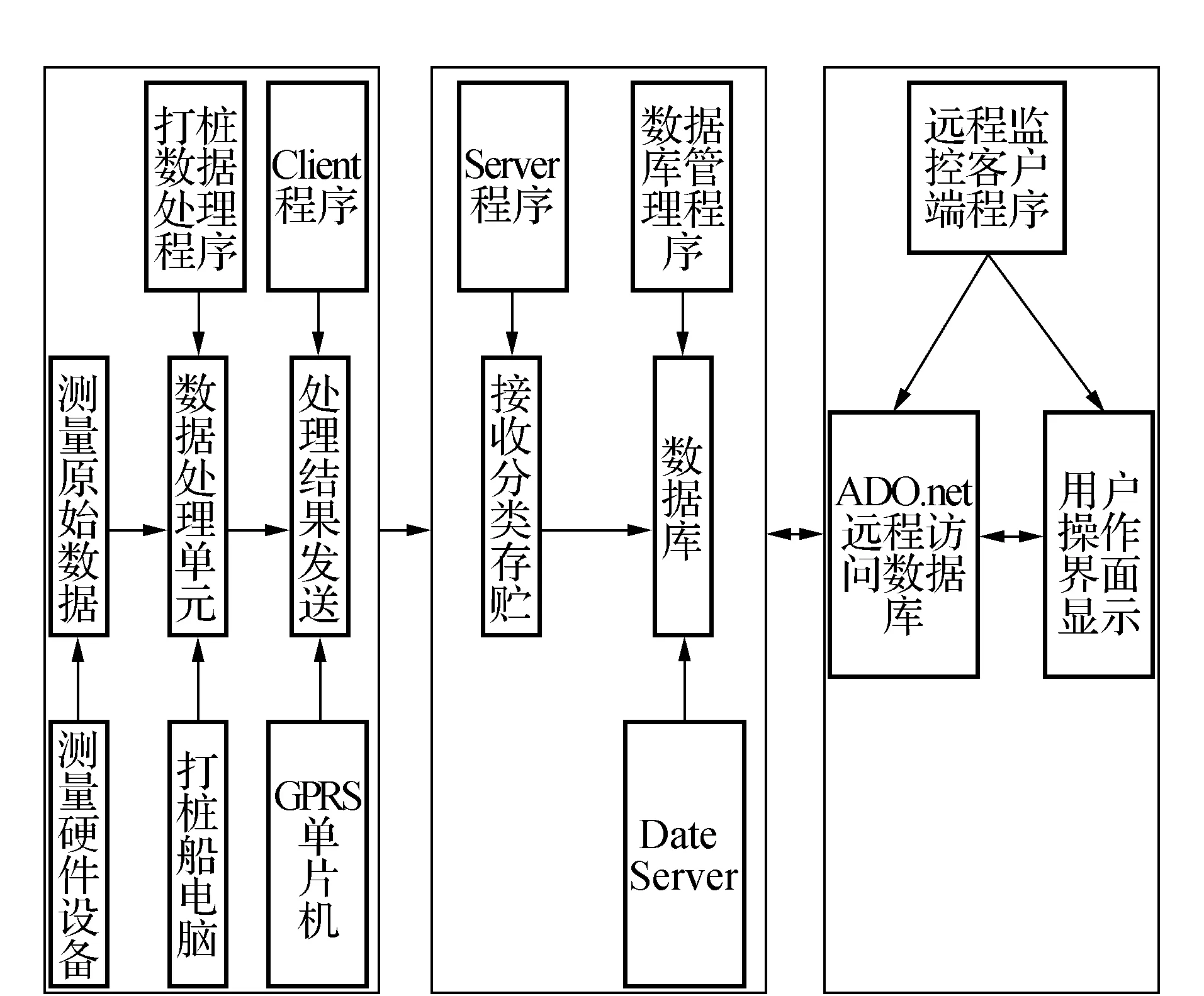
圖2 數據傳輸流程
2.1 服務器開發
服務器接收和存貯來自各艘打樁船發送過來的數據信息,并為客戶端程序提供訪問數據,因此,它在本系統處于至關重要的地位。首先需要根據現場監控軟件的操作步驟分析數據傳輸的具體內容,詳細內容見表1。其次選擇運行環境和數據庫平臺,服務器運行環境選用微軟Windows 7 Sever版本;數據庫平臺選用SQLSEVER2005,它相比ORACALE、ACCESS、Foxpro等國內外常用數據庫具有的優點是:良好的數據庫設計、杰出的管理和網絡運行功能。最后在SQLSEVER2005數據庫平臺中創建項目名稱,針對數據內容創建數據表和選擇關鍵字。
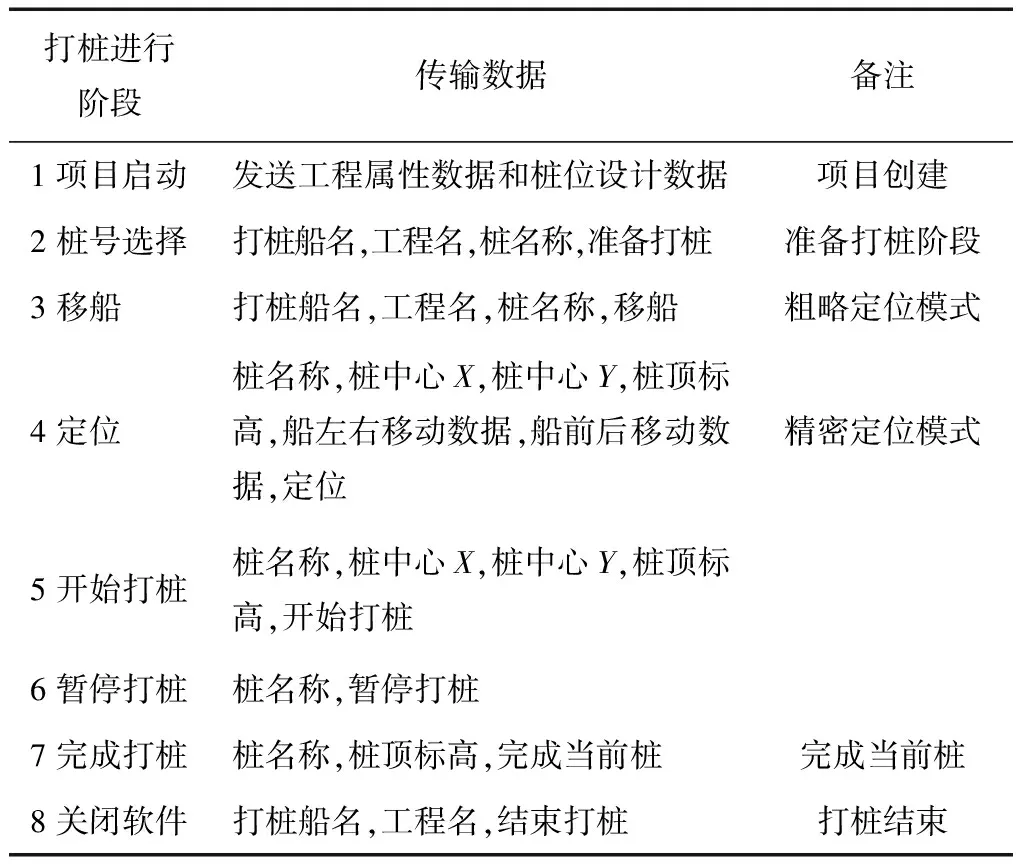
表1 海上打樁遠程監視系統數據傳輸內容
創建數據庫名為PilingData數據庫,在PilingData庫中建立5張數據表,這些數據表分別是樁位數據表PicketData、船固坐標表PilingShipCoor、臨時數據表CurTemPilingInfo、樁體定位數據表PositionProcess、工程屬性表ProjectInfo,這些表都記錄了打樁船的重要參數信息和樁體定位過程和數據。以樁位數據存貯表PicketData(見表2)為例,該表存貯了所有樁位的設計坐標、打樁方式、實測坐標和完成信息等,樁體號碼是該表的索引關鍵字。這些數據將用于繪制樁位詳細分布圖、已完成樁位的坐標偏差計算、工作質量和進度的統計制表等其他工作。
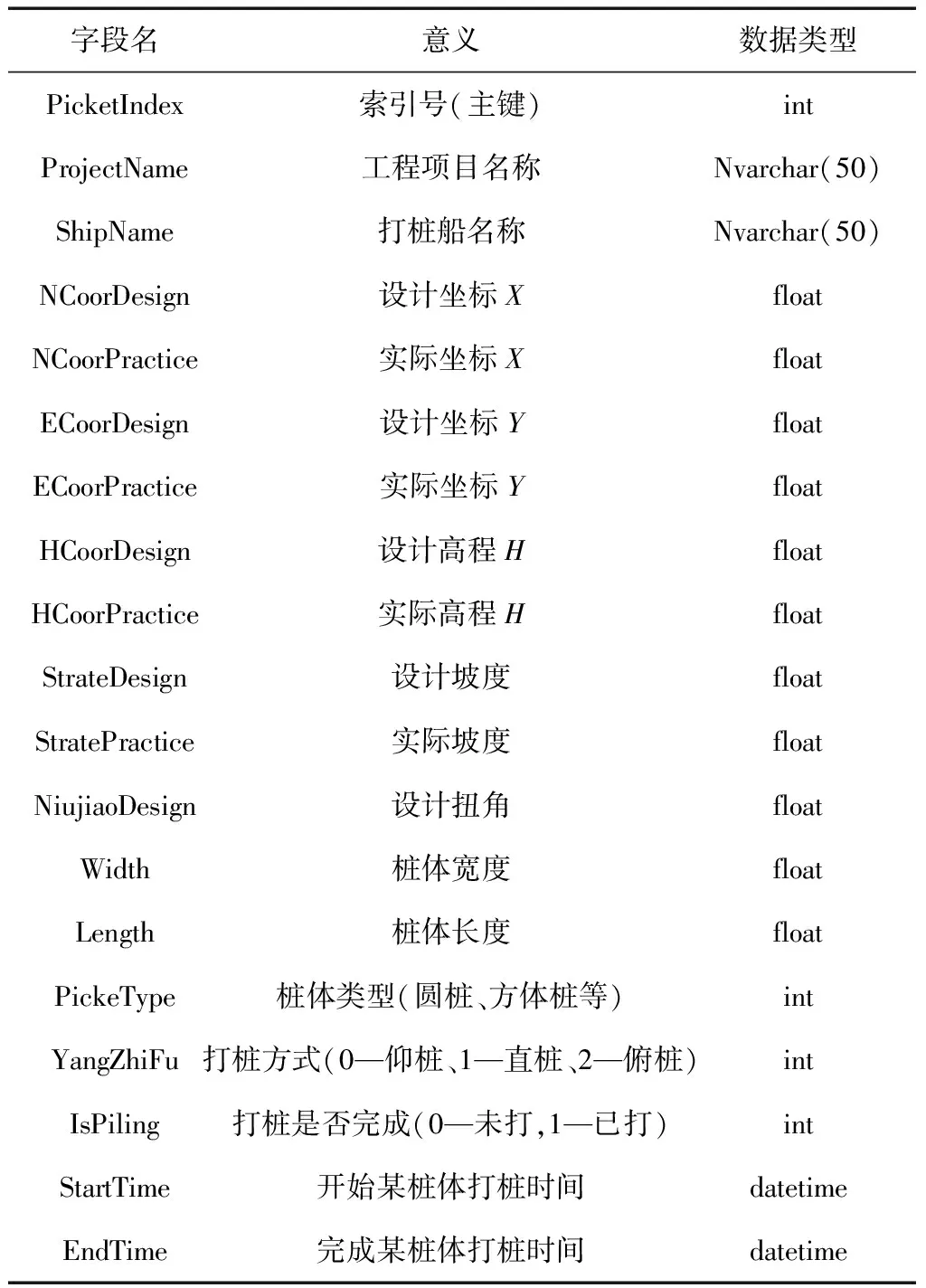
表2 樁位數據存貯表PicketData
2.2 現場監控軟件開發
現場監控軟件在SeaGPS軟件(詳見文獻[1])基礎上重新設計和開發,程序設計流程如圖3所示。
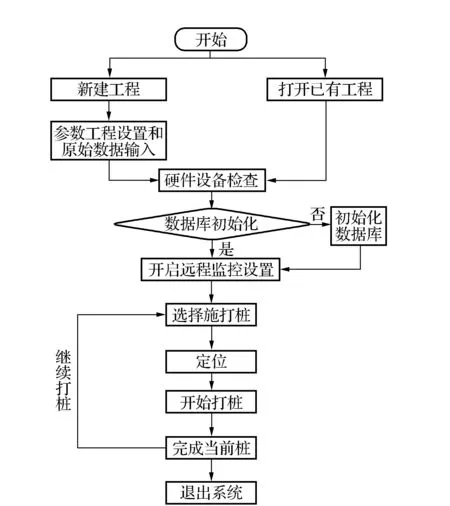
圖3 現場監控軟件流程
當項目開始時,用戶需新建工程項目,并輸入工程參數和基礎數據,同時還需進行數據庫初始化操作,數據庫初始化操作的目的是將打樁項目的基礎數據(設計樁位數據、項目屬性數據等)發送至服務器,數據庫完成首次初始化后,現場監控軟件此功能按鈕變為灰色以防誤操作,再開啟遠程監控,這樣就完成了打樁前的所有準備工作。
接下來,用戶在現場監控軟件中選擇需要施打樁的樁號進行樁體定位,并將定位結果與樁位設計數據進行比較,當差值滿足限差規定時,電腦語音提示可以開始打樁。當完成當前樁時,用戶可以選擇繼續打樁或者退出系統結束打樁工作。
2.3 遠程可視化軟件設計
軟件主要包含實時監控、數據查詢、動畫模擬打樁、數據報表生成等功能,此外還具有放大、縮小、平移、坐標旋轉、總體視圖等其他人性化的功能。軟件設計流程如圖4所示。
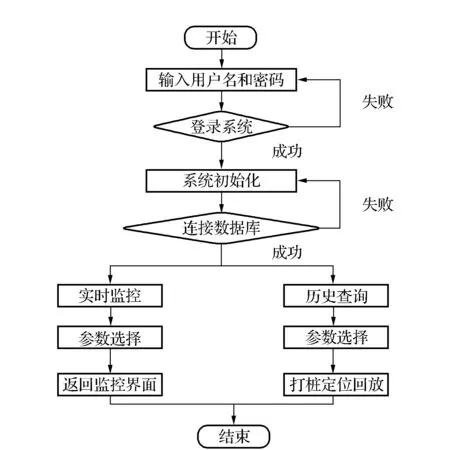
圖4 遠程監控設計流程
其中,在實時監控功能界面中可以查看任意選擇的打樁船實時工作畫面,如圖5所示。在總圖區域中,用戶不僅可以查看該船正在進行的項目基本信息,還可以觀察已打樁的分布位置(紅色表示已打樁,綠色表示當前施打樁,黑色表示未打樁),并查看當前打樁船在樁位設計圖中的準確位置;在船體樁位視圖區域中,用戶可以查看當前樁的平面偏差;在施打樁立面圖中,用戶可以查看當前樁的高程偏差。
在歷史查詢功能中,用戶可以查詢已打樁的屬性信息和定位數據結果等其他內容,如圖6所示。在歷史記錄示意圖區域中,用戶可以查看已打樁的打樁定位模擬動畫,并可以通過該區域的相應控件進行畫面播放的快慢、圖形大小等基本設置。
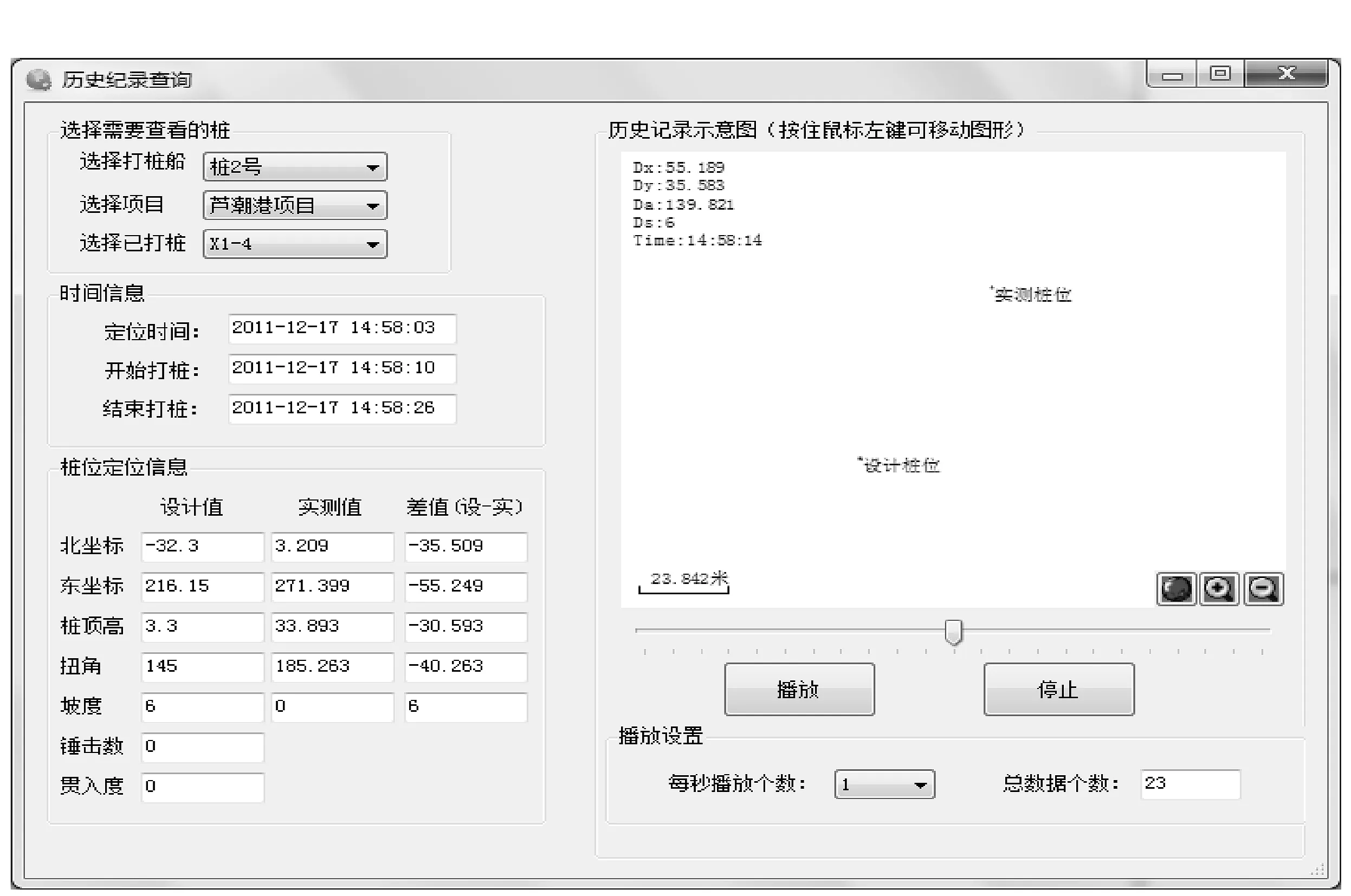
圖6 歷史記錄查詢界面
同時,該軟件還可對已打樁的數量和質量進行統計和制圖,并結合工程屬性和其他內容生成Word報表,滿足用戶對項目的紙質簽名和歸檔等需求。
3 系統實現和應用
3.1 系統實現
基于GPRS單片機的遠程監視系統的各個組成軟件都是在Windows7編譯環境,選用VC.net中的C#語言進行開發實現。
在系統結構上,本項目選用C/S(Client/Server)結構,它相比B/S(Browser/Server)結構[7-8]具有以下優點:
1)C/S結構相應速度快;
2)在操作簡便性和快捷性方面,C/S結構優于B/S結構;
3)在數據傳輸安全方面,C/S結構優于B/S結構;
4)C/S結構簡單,開發周期短,對服務器要求較低。
在網絡協議上,TCP(Transmission Control Protocol)協議相比UDP(User Datagram Protocol)協議[9]雖然傳輸效率稍低,對系統資源需求較多,但是TCP協議可靠性程度高。經多次試驗測試證明,TCP協議從未出現數據丟失,而UDP協議出現少量數據丟失。由于此項目對數據安全和完整性要求較高。因此,本項目選用TCP協議作為系統的網絡傳輸協議。
一套基于GPRS單片機的遠程監控系統需要的硬件設備和軟件見表3。當系統需要增加新的打樁船時,只需給這艘打樁船添加一套GPRS單片機,并在現場電腦主機中安裝現場監控軟件。
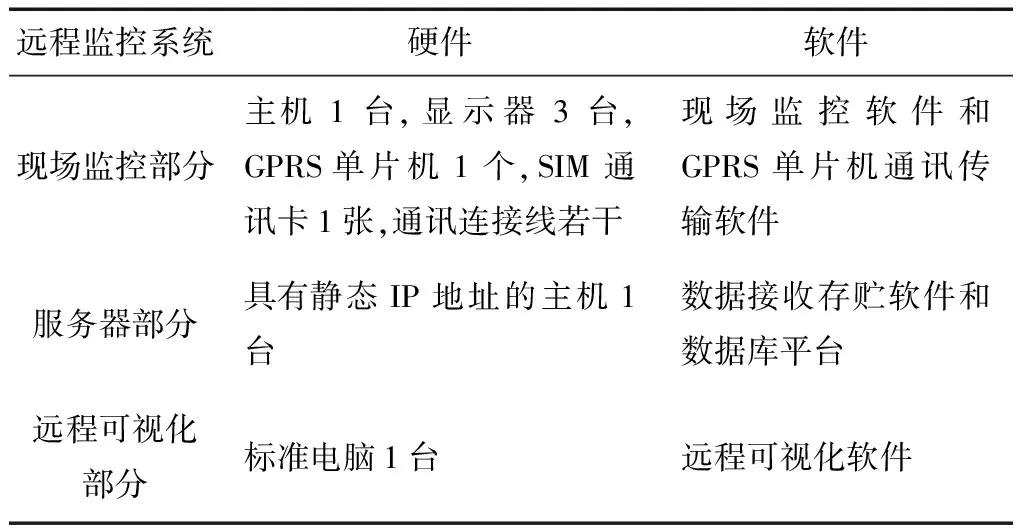
表3 硬件和軟件統計
3.2 系統應用
本文研發的海上打樁遠程監控系統已經成功在某海上打樁項目中得到應用。經過努力和協調工作,系統各部分都安裝調試成功。在系統長時間試運行過程中,現場監控軟件成功將所有數據發送出去,服務器在接收和存貯大量來自現場監控端的數據過程中未發現數據丟失,驗證了該系統的可靠性;遠程可視化軟件與服務器快速建立連接,實現遠程可視化操作,在多個用戶同時訪問時未出現系統故障,實現了多用戶同時操作且互不干擾;在實時性方面,遠程可視化軟件實時監控界面與現場監控界面基本一致,延遲較小。
目前,監控系統運行情況良好,用戶體驗效果較好,得到各使用者的廣泛好評,圖5所示為海上打樁遠程監控實時界面,用戶只需要選擇訪問的打樁船名稱,就能實時查看當前打樁船的工作狀態和項目基本信息,一目了然,非常清楚地反映用戶需要了解的信息內容。
圖6所示為歷史記錄查詢界面,用戶可以在這個界面中查看已打樁的完成時間、打樁時長和位置偏差等基本信息,并且用戶還可以在該界面中查看已打樁的動畫模擬過程,動畫模擬打樁非常形象地還原了打樁的具體過程,方便用戶詳細了解具體施工細節。
4 結束語
本文綜合應用了無線通訊技術、導航定位技術、互聯網技術、數據庫及可視化軟件設計等多種技術對海上打樁遠程監控系統進行研究和開發,具體歸納如下:
1)系統闡述了海上打樁測量工藝流程及海上打樁遠程監控系統的總體結構和各個子系統的功能。
2)對數據傳輸內容和處理過程的相關問題進行深入分析,嘗試性提出該系統結構和網絡模式的選擇策略。
3)按本文所述方法研發的海上打樁遠程監控系統已成功用于某打樁工程項目中,目前該系統運行情況良好,用戶體驗較好。公司領導及專家能隨時掌握所有打樁船的工作情況,并對突發事件準確進行及時處理,節省了大量的人力、物力,為保障工程項目的順利進行做出重要貢獻。
[1]楊帆.海上打樁遠程監控系統研究[D].上海:同濟大學,2012.
[2]周小平,姚連壁,劉春.打樁定位的理論、方法與實現[M].西安:西安地圖出版社,2008.
[3]關勇.物聯網行業發展與分析[D].北京:北京郵電大學,2010.
[4]孫軍亮.基于GPRS的電網遠程監控與調度系統的研制[D].西安:西安科技大學,2009.
[5]程劍剛.網絡RTK聯合聲波測深儀在水下地形測量中的應用[J].測繪工程,2014,23(3):63-65.
[6]王建忠,王玉龍.多波束與RTK三維水深測量技術的聯合應用[J].測繪工程,2014,23(4):65-68.
[7]尚捷,姜文剛.基于3G的內河水流遠程視頻監控系統設計[J].計算機與數字工程,2011,39(6):169-172.
[8]苗沐新.淺論C/S和B/S軟件系統體系結構的差異[J].長春師范學院學報:自然科學版,2007,26(3):92-95.
[9](美)萊特 (Wright,G.R.),(美)史蒂文斯(Stevens,W.R.).TCPTCP/IP詳解(卷2:實現)[M].陸雪瑩,蔣慧,譯.北京:機械工業出版社,2008.
[責任編輯:劉文霞]
A design of remote monitoring for marine piling based on GPS-RTK
YANG Fan1,LIN Ji-zhao1,XIE Yi-lin2,JIA Deng-ke1
(1.CCCC-FHDI Engineering Co.,Ltd.,Guangzhou 510230,China;2.Nanjing Hydraulic Research Institute,Nanjing 210029,China)
It presents the significance of a design of remote monitoring for marine piling, and the structure of the system of marine piling based on GPS-RTK.A scheme of remote monitoring system for marine piling is proposed. The system enables the user to examine the working condition and the quality of finished work,and creates engineering reports.At last it can be applied to some project in Jiangsu Province successfully,which reaches to the smooth process of this project and gives some advice for other Projects.
marine piling;GPS-RTK;remote monitoring;data transmission;data base
2013-11-12;補充更新日期:2014-05-10
楊 帆(1988-),男,碩士研究生.
P228.4
:A
:1006-7949(2014)12-0076-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
財經(2017年2期)2017-03-10 14:35:35
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
財經(2016年15期)2016-06-03 07:38:02
商用汽車(2016年4期)2016-05-09 01:23:12
財經(2016年3期)2016-03-07 07:44:46