露天礦山生產計劃三維可視化編制技術
2014-08-25 08:28:32許利生代碧波江鵬飛
金屬礦山 2014年1期
許利生 代碧波 江鵬飛
(1.金屬礦產資源高效循環利用國家工程研究中心,安徽馬鞍山,243004;2.中鋼集團馬鞍山礦山研究院有限公司,安徽馬鞍山,243004;3.金屬礦山安全與健康國家重點實驗室,安徽馬鞍山,243004)
礦山生產進度計劃是指導露天礦山生產的一項重要依據,編制生產進度計劃是礦山技術人員每年的一項基本任務,但露天礦山開采系統往往都是復雜多變,工藝流程多,同時還受許多條件制約,如采場空間、采剝關系、設備效率等。目前國內大部分露天礦山在編制生產進度計劃時仍采用人工的方式,這種方法工作量大,費時費力,且編制完畢后如采場任何一個約束條件出現變化,都難以返工修改。
本研究對露天礦山生產進度計劃編制存在的難點及關鍵技術進行了研究。運用計算機,在三維可視化的環境下,實現人機交互的露天礦山生產進度計劃編制。最后通過工程實例驗證了本技術的可行性及其優越的性能。
1 計劃編制技術
1.1 計劃編制的基本原理
生產進度計劃將開采對象分解成各個任務單元,可以在三維環境下用1個空間點來表示1個任務單元。根據生產對象性質的不同,任務單元可以分為實體任務單元與抽象任務單元2種類型。
實體任務單元指實際采場工作面,抽象任務單元在空間上與實體任務單元相對應,其屬性包括任務單元完成速度或所需時間、單元任務的度量單位等。
每一個任務單元都帶有很多的屬性,如三維空間坐標、面積、長度、密度、體積、質量、推進方向、開采量、品位、剝采比控制、臺階下降速度等。這些屬性有的是在設計中產生的,有的是在計劃編制時進行指定的。這些屬性是統計報表生成的基礎,其中有的屬性本身就是統計量,而有的屬性是為分類統計而定義的。
將進度計劃分解成各個任務單元后,應按生產計劃制定完成任務單元的工作順序,根據順序將各任務單元進行排序。不同的排序方案表示不同的生產進度計劃方案。再根據各實體任務單元對應的抽象任務單元,即任務單元的完成速度或所需時間等指定各任務的開始和結束的日期,就可以得到整個生產計劃的時間。
1.2 計劃編制系統結構與功能
計劃編制系統依次劃分3大塊:輸入、處理與輸出。生產進度計劃的編制都是在一個三維數據庫平臺上進行操作,該三維數據庫存放了礦山地質、生產等數據信息,其系統結構如圖1所示。

圖1 系統邏輯結構Fig.1 System logical structure
輸入部分主要指數據的輸入,將礦山的地質信息(品位、巖性)、設計基礎信息(地表現狀、最終境界)以及生產信息輸入至三維數據庫平臺中。
處理部分則是將進度計劃分解成任務單元并制定任務工作順序,同時可根據實際情況對各任務單元之間完成的順序進行調整。
輸出部分主要是呈現進度計劃編制結果,包括生成計劃進度表、各種統計報表以及生產過程的三維動畫。
1.3 生產進度計劃編制的關鍵技術
(1)三維可視化建模技術。三維可視化建模技術是將生產計劃編制的整個程序建立在一個完全三維的環境基礎上,其主要技術包括鉆孔地質數據庫、三維地質體實體模型、三維地質體礦石品位塊段模型及露天境界模型等。
(2)定義開采場所,形成任務單元。場所可分為采場、堆場、排土場和選廠,形成任務單位。場所與場所之間的邏輯關系采用物料的運移表示,如圖2。

圖2 礦巖運移圖Fig.2 Figure ore transport
任務單元形成后,需對任務進行屬性賦值,屬性主要包括:①開采方法,包括臺階方法、臺階多邊形方法、多邊形方法、邊坡掌子面方法。在中長期進度計劃中,臺階的開采方式最常用,需要確定露天境界的開始水平、結束水平以及臺階高度值;臺階多邊形和多邊形的開采方法常常用在短期計劃,需要考慮設備的分配情況,通過多段線將臺階平面劃分成多個多邊形區域。邊坡掌子面開采方式常常用鏟土機的開采推進方向可以傾斜的沙質礦山。②開采方向,即工作面推進方向。可以是東南西北方向,也可以是放射方向。
(3)開采限制技術。開采限制可以是開采過程中的任何一部分,能影響到進度計劃編制的過程,開采限制主要包括3個方面:①開采能力。開采能力可能源于設備的工作能力,也可能源于所在場所的儲量限制,也可以隨著時間發生變化。②可用設備。③自然條件限制。④其他條件。例如編制進度計劃時,有時會希望保持一個固定的剝采比不變,這樣有利于礦山企業保持一個穩定的現金流等。
開采限制是通過設置不同的回采參數或者目標、比率來控制,在編制進度計劃中的開采限制越多,就越難達到理想的結果,但是正因為開采的限制,才可以模擬出更多的符合實際的生產進度計劃方案。
(4)任務分解。把采剝工作分解成實體任務單元,并形成相應的抽象任務單元,添加相關的設備屬性,如指定設備數量、臺效,采場工作位置等。在任務分解過程中,任務單元的大小要能滿足計劃編制的要求、確定抽象單元任務與實體任務單元之間的空間依存關系。
(5)任務優先排序技術。任務優先級控制了根據塊體之間的相互關系確定塊體何時能變得可以采動,控制參數主要包括垂直滯后距離、最大平臺寬度。
垂直滯后距離控制的是上方臺階工作面和下方臺階工作面之間的距離,即臺階的最小工作平臺寬度。換句話說,一個臺階上的1個塊可以開采的話,它上方臺階有多少個塊體必須先開采完畢。最大平臺寬度常常用于開采層狀礦床。如果一個設備用來開采礦床的上覆巖層,而且巖層是越來越薄,如果回采速度不進行調整,那么將開采大量的巖石才能揭露礦體,這在實際中就會引起前期投入巨大,后期收益比較集中,這在實際生產中是不允許的,需要在開采初期就能較快地揭露礦體,回籠資金,這時候最大平臺寬度的設置就顯得至關重要,通過限制推進方向的長度,使設備快速向下開采接觸礦體。
(6)計劃進度表生成技術。根據開采方案,產生與時間相對應的進度計劃表,并根據采剝的平衡關系,進行實時調整。
(7)自定義統計報表技術。根據生產的需要,自定義各種類型報表技術,如采剝總量統計表、生產剝采比表等。
(8)計劃推進三維動畫技術。此技術是用來演示計劃推進過程。根據不同的日期間隔,演示計劃隨時間的推進過程,可以自定義起始與終止日期。
2 工程實例
某礦為一大型露天鐵礦山,年產礦石700萬t,采場生產臺階高度14 m,最終境界底部標高為+1 230 m,采用汽車—鐵路開拓運輸方式,采用全臺階開采工藝,自礦體上盤礦巖接觸帶的巖石中開段溝,向礦體上、下盤兩工作幫同時推進,各工作平臺寬度60~70 m,同時工作臺階數5~7個。
2.1 工程現狀
計劃編制之前,首先對礦山的生產現狀進行分析,主要內容包括:
(1)采場內工作臺階、出礦臺階。
(2)穿孔、鏟裝設備臺效。
(3)臺階推進方式。
(4)生產剝采比。
生產現狀見表1。
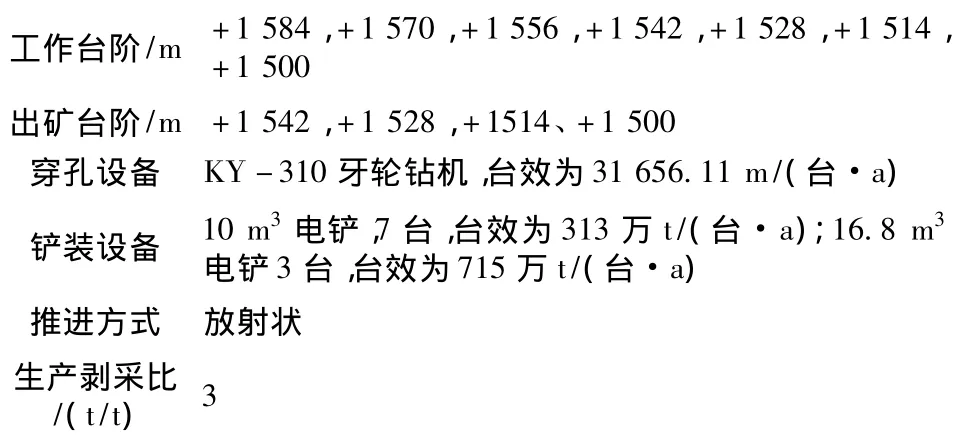
表1 生產現狀Table 1 Production status table
2.2 基礎數據準備
基礎數據主要有三維塊段地質模型,最終境界模型,開采現狀模型、設備臺效,生產剝采比、分層礦量等,見表2。
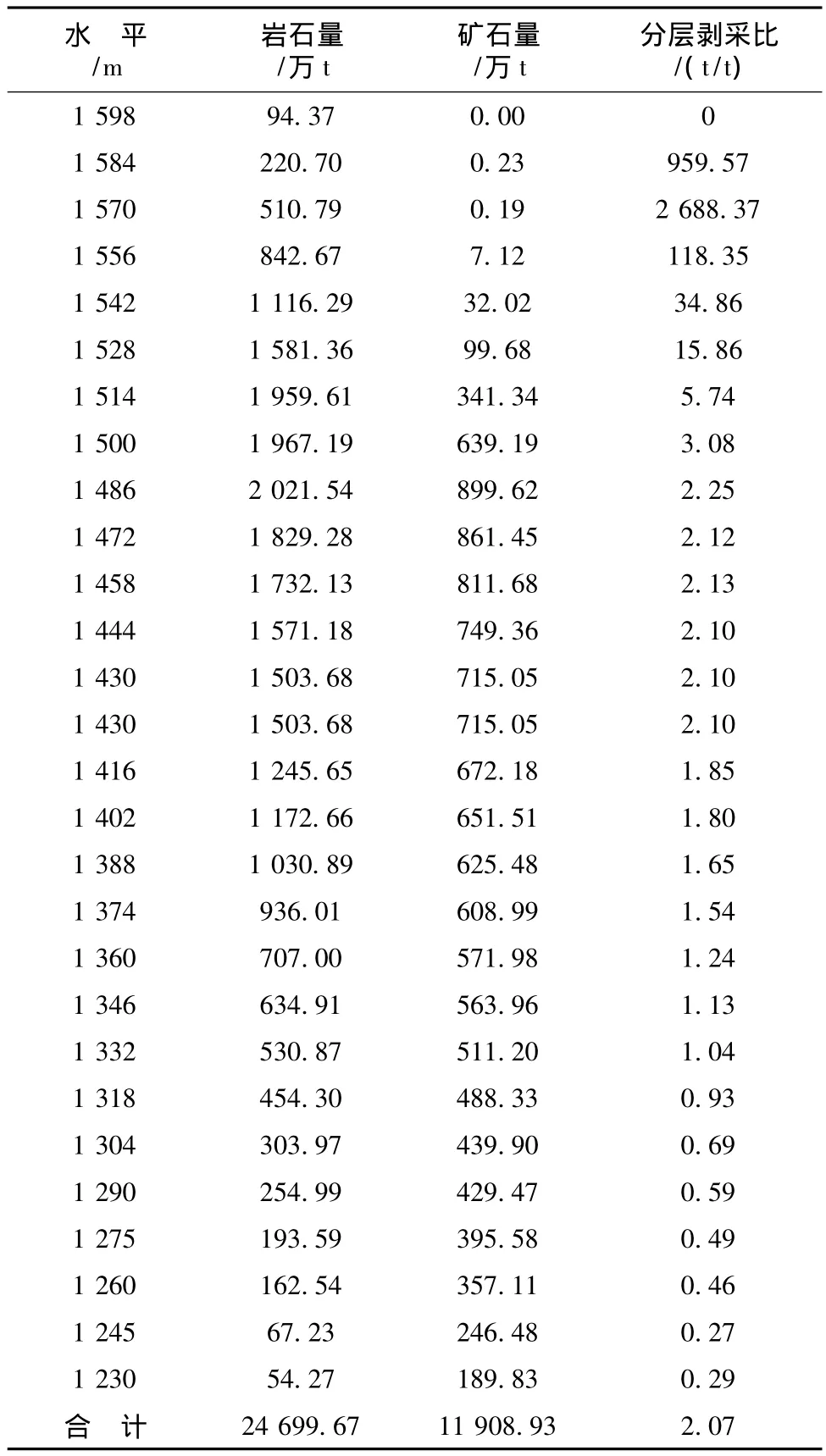
表2 分層礦巖量Table 2 Hierarchical scale mining
2.3 定義開采場所
本實例定義2個工作場所,即采場和排土場。開采方法選擇臺階開采,推進方向選擇放射狀。推進起始位置選擇采場北部,礦體中部。
2.4 設置開采限制
根據分層礦巖量表可以看出,由于上部臺階巖石欠剝,根據生產剝采比均衡,礦山2014年需要集中剝巖,礦石生產能力為700萬t/a,生產剝采比為5.3 t/t左右,限制開采采剝總量為4 410萬t/a左右,可用設備為10臺10 m3電鏟。2014年后礦山追回巖石欠剝量,生產剝采比降低至3 t/t左右,生產能力仍為700萬t/a,限制開采采剝總量2 800萬t/a左右,年下降速度限制為每年下降1個臺階。
2.5 任務分解及排序
每個生產臺階的采剝計劃對應1個生產任務,共+1 584,+1 570,+1 556,+1 542,+1 528,+1 514,+1 500 m計7個生產臺階,設置7臺鏟裝設備,設備臺效為3 127 742.91 t/(臺·a),垂直滯后距離為40 m,即下部臺階滯后上部臺階40 m。最大平臺寬度80 m,即本臺階年最大推進速度為80 m。
2.6 進度編排
進度編排設置時間周期為年,進度編排完成后將產生相關的生產調度甘特圖,甘特圖顯示了任務的時序安排信息。當任務之間生成依賴性時,時序安排引擎將計算出任務的起始與結束日期。
在進度編排完成后,還可以生成開采計劃推進過程的動畫,用戶可以使用已存在的實體模型顏色或由推進計劃日期自定義顏色來創建開采計劃過程動畫。圖3~圖6即為開采計劃過程動畫過程中的4種狀態圖。
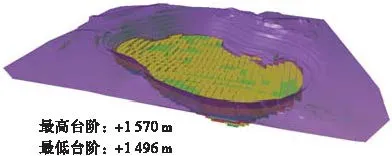
圖3 2013年年末狀態圖Fig.3 2013 Year-end state diagram

圖4 2014年年末狀態圖Fig.4 2014 Year-end state diagram

圖5 2018年年末狀態圖Fig5.2018 Year-end state diagram
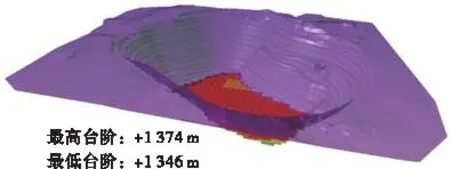
圖6 2023年年末狀態圖Fig.6 2023 Year-end state diagram

表3 礦山未來5 a的生產能力Table 3 The production capacity of the mine next five years
2.7 結果分析
根據所得到的計劃編排以及各種統計報表,得出了如下結果。
(1)2014年為礦山的集中剝巖期,采場設備數量需增加,采剝總量增大,經過生產剝采比均衡計算,生產剝采比按5.3 t/t考慮,此后生產剝采比降低至3 t/t以下。
(2)2014年后礦山追回此前巖石欠剝量,采剝設備減少3臺,否則計算出采剝總量仍然大,雖然增加礦石生產能力,但年下降速度過快,達到每年下降2~3個臺階,這與實際生產情況不符。采剝設備減少3臺后,采剝關系趨于平穩,年下降速度為每年下降1個臺階。
(3)所做的計劃安排是在現有生產狀況與能力以及所配備的設備資源的基礎上進行安排的。從生產計劃編排中可以得到在控制年下降速度的情況下,適當地增加鏟裝設備將使整個礦山的生產能力有一定的提高。
3 結論
(1)露天礦山的生產作業環境具有很強的空間約束性,作業對象情況復雜。
(2)露天礦山生產進度計劃編制的限制條件數目較多,如設備效率、水平推進速度、垂直延伸速度等,但在三維環境下,復雜的計劃編制變得簡單明了。
(3)任務單元是生產進度計劃編制的基本對象,將生產對象分解成任務單元,對任務單元賦予各種屬性并制定其工作順序,就可得到各種生產進度計劃方案。
(4)計劃編制時不僅要考慮產能和生產剝采比目標,同時還要考慮工作面推進時的年下降速度合理性問題。
[1] 胡柳青,王李管,畢 林.地下礦山生產計劃3D可視化編制技術研究[J].煤炭學報,2007(9):930-933.Hu Liuqing,Wang Liguan,Bi Lin.3D visualization system based production plan scheduling of underground mine[J] Journal of China Coal Society,2007(9):930-933.
[2] 荊永濱.地下礦山生產計劃三維可視化編制技術研究[D].長沙:中南大學,2007:1-3.Jing Yongbing.Study of 3D visualization based production plan scheduling of underground mine[D].Chang Sha:Central South University,2007:1-3.
[3] 代碧波.礦床開采環境數字化評價技術研究[D].長沙:中南大學,2007:1-3.Dai Bibo.Research on the digitization evaluation technology in deposit mining environment[D].Chang Sha:Central South University,2007:1-3.
[4] 吳會江,李建祥.露天礦生產計劃的現狀、問題與對策[J].金屬礦山,2005(04):4-6.Wu Huijiang,Li Jianxiang.Open-pit mine production planning:the current,problems & strategies[J].Metal Mine,2005(04:)4-6.
[5] 雷用嘉,孫宏生,盧光遠,等.試論采掘計劃管理的基本方法[J]. 礦業工程,2008(05):6-8.Lei Yongjia,Sun Hongsheng,Lu Guangyuan,et al.Elementary method for management of mining plan[J].Mining Engineering,2008(05):6-8.
[6] 馮超東,曹 亮.基于SURPAC的露天礦三維采掘進度計劃編制系統[J].金屬礦山,2008(12):139-141.Feng Chaodong,Cao Liang.Open pit 3D production scheduling system based on surpac software[J].Metal Mine,2008(12):139-141.
[7] 董衛軍.礦山生產計劃智能決策計算機系統[J].金屬礦山,2002(3):10-12.Dong Weijun. Intelligent decision system for mining plan[J].Metal Mine,2002(3):10-12.
[8] 李英龍,童光煦.礦山生產計劃編制方法的發展概況[J].金屬礦山,1994(12):11-16.Li Yinglong,Tong Guangxu.Survey of the development of mine production plan scheduling[J].Metal Mine,1994(12):11-16.
[9] 李海其.計算機采掘計劃自動編制系統的研究[J].礦業研究與開發,1994,14(3):89-92.Li Haiqi.A study on computer automatic programming system for mining planning[J].Mining Research and Development,1994,14(3):89-92.
[10] 李克慶,黃鳳吟.多目標相似優序值法在礦山開發方案優選中的應用[J]. 地質技術經濟管理,1995,17(1):42-46.Li Keqing,Huang Fengyin.Multi-objective optimization sequence similarity value method in the mine development program preferred application[J].Geological Techno Economic Management,1995,17(1):42-46.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
電子制作(2018年11期)2018-08-04 03:26:08
中國軍轉民(2017年6期)2018-01-31 02:22:28
工業設計(2016年12期)2016-04-16 02:52:00
