糾偏檢測控制技術在起重機上的應用
2014-09-04 07:38:30徐偉鋒浙江麒龍起重機械有限公司
中國特種設備安全 2014年3期
關鍵詞:檢測
徐偉鋒 浙江麒龍起重機械有限公司
糾偏檢測控制技術在起重機上的應用
徐偉鋒 浙江麒龍起重機械有限公司
本文分析橋門式起重機大車運行機構啃軌的原因,提出運用糾偏檢測控制技術。結合先進的PLC控制和變頻調試技術、PID控制器以及現場總線通訊技術等,取代傳統的電氣控制方式,減少橋門式起重機中大車的啃軌現象,提高設備的安全使用性能,減少設備的故障率,降低維護成本和維修工作量,同時操作簡單、運行可靠,具有節能等效果。
糾偏檢測 起重機 PID 可編程控制器 變頻器 啃軌
隨著我國工程建設向標準化、工廠化、大型化、集成化方向發展,起重機吊裝的重量越來越重,高度越來越高,難度越來越大,一個大型設備的吊裝穩定可靠,往往是制約工程進度、經濟和安全的關鍵。而橋門式起重機是用來吊裝水輪發電機組的定子、轉子、勵磁機組等關鍵設備,對吊裝的精度和速度要求相比其他起重機要高很多,所以橋門式起重機如還采用傳統轉差率調速的電氣控制系統,如電機轉子串電阻調速控制,其調速范圍小、控制精度低、能耗大、故障維修率高,并且大車運行機構經常會產生啃軌,影響其吊裝的精度和性能。
1 橋門式起重機啃軌原因分析
橋門式起重機大車運行機構啃軌現象一般是由多種因素綜合作用所造成的,其主要因素有制造的質量、鋼結構的變形和剛度、車輪的水平度和垂直度、運行機構輪距誤差以及起重機的安裝水平等。
1.1 設計制造方面的原因
根據設計規范要求說明,橋門式起重機在設計制造過程中,其偏斜水平側向載荷與其起重機的輪壓、S/H(S-跨度、H-基距)比值有關。
在實際設計制造中,起重機大車運行機構車輪軸孔平行度加工超差,對角線超差或結構材質中殘余內應力釋放,使車輪運行中心線與軌道中心線之間產生一個夾角α,如圖1所示車輪水平偏斜,導致車輪運行軌跡偏離軌道中心線產生水平偏移,而產生啃軌。
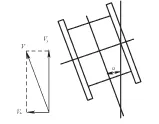
圖1 車輪水平偏斜示意圖
1.2 安裝調試方面的原因
橋門式起重機安裝過程中,兩側大車運行機構安裝時,安裝人員要對車輪的跨度、對角線、和兩車輪的直線進行測量,保證跨度、對角線相等,兩車輪的直線一致后,才能進行下一步的安裝。當橋門式起重機的大車輪跨度不等,對角線相等,車輪直線存在偏差而運行時,跨度小的一對車輪啃軌道的外側,跨度大的一對車輪啃軌道的內側,使其產生啃軌。
同時,橋門式起重機的軌道和基礎是起重機正常工作的重要組成部分,基礎不牢會導致軌道下沉,從而導致起重機無法正常工作。當兩條軌道高低差較大時,會使起重機整體橫向移動,從而造成啃軌現象。當兩條軌道跨距或軌道直線性超差,而起重機跨度不變時,輪緣與軌道側面間隙減小,從而會造成啃軌現象。安裝單位在進行軌道基礎和軌道安裝過程中要嚴格要求,避免因軌道問題造成啃軌現象。
1.3 操作使用方面的原因
橋門式起重機在操作運行中,由于不按操作規程進行使用(如運行機構起動過快或停止時過快),或運行過程中橋門式起重機兩側所受運行阻力不相等,都會造成橋門式起重機運行機構兩側驅動電機不同步,即其兩側電機輸出的轉速不相等,導致其起重機運行機構兩側車輪線速度不相同而形成位置差,從而產生橋門式起重機運行機構跑偏而啃軌。
在分析了橋門式起重機的啃軌的原因后,治理啃軌的關鍵就是糾正其起重機兩側大車運行機構的運行速度的偏差以及兩者行走的偏斜量。若把兩側大車運行機構行走的偏斜量控制在非常小的范圍內,那么就不會出現大車運行機構的車輪輪緣與軌道側面接觸擠壓,也就不會發出啃軌現象。
2 糾偏檢測控制系統
為解決上述問題,可以利用糾偏檢測技術,通過安裝在橋門式起重機大車機構左右兩側的絕對值旋轉編碼器裝置檢測,由Profibus現場總線將其兩側的檢測信息傳輸給可編程控制器PLC中,經PLC內的程序邏輯運算及比較后,將控制運行信號和力矩變化的調整信號傳輸給大車左右兩個變頻器,使得其中一側的輸出力矩快速、自動、準確地跟隨另一側的輸出力矩變化而變化,從而消除該起重機大車運行機構兩側行走的偏斜量,達到控制的目的。
糾偏檢測控制系統為負反饋閉環控制系統,其主要由絕對值旋轉編碼器、PLC、變頻器、現場總線和驅動機構組成,如圖2所示。該糾偏檢測控制系統,首先可定義橋門式起重機大車運行左右側驅動機構的其中一側驅動機構為主動機構,則另一側為被動機構。而起重機大車運行主動機構的行走速度可根據PLC給定,采用變頻調速調整輸出力矩,并結合PID算法進行控制,被動機構則跟隨主動機構的行走的速度而相應變化。
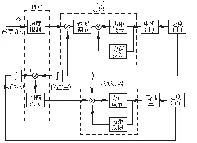
圖2 糾偏檢測系統結構
因為起重機上的力矩調整要比速度調整相應快、實時性好、穩定可靠,所以該橋門式起重機的大車運行主動機構包含有兩個閉環負反饋,力矩反饋為內反饋,速度反饋為外反饋,最終在兩者的作用下完成輸出力矩的調整,從而使得被動機構能快速地跟隨主動機構的速度而變化,避免起重機發生啃軌現象。
同時,糾偏檢測控制系統中采用PID算法對其兩個大車驅動機構的速度誤差進行調節,將調節的結果傳輸給大車被動機構變頻器,并作為后續控制的力矩給定值。其速度調節PID控制器的組成如圖3所示。
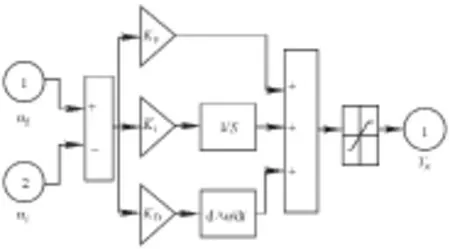
圖3 PID控制器
PID控制器在實際應用中參數調整方法如下:
1)確定比例增益Kp。在調整Kp值由小到大,則可以發現Kp值增加時,系統的動作相應變快,調節速度加大;但如Kp值太小,系統調節動作相應緩慢;Kp值太大,系統會趨于不穩定。所以,在調整Kp值使得調整波動2~3次穩定,即可確定Kp值。
2)確定積分系數Ki。積分系統Ki的作用是消除偏差,實現高精度調速。若Ki值過小,積分作用弱,消除偏差的效果差;若Ki值過大,積分作用強,雖偏差消除越快,但同時振蕩次數增多。所以,應選取合適的值時,可以比較合適進行調節控制。
3)確定微分系數Kd。微分控制可以改善系統的動態性能。如當Kd偏大或偏小時,系統的超調量將會較大,系統的調節時間較長,從而影響系統的調節。只有選取合適的值時,才可以得到比較合適的過渡。
通過采用該糾偏檢測控制系統在橋門式起重機的應用,得出了起重機在運行過程中的實際糾偏控制波形,如圖4所示。圖4所反映的是該橋門式起重機在起動停止時、運行中、以及加減速等各個階段的位置偏差情況。在該橋門式起重機大車兩側運行機構的位置偏差超過4mm,即為啃軌,而本糾偏檢測控制系統中,當其位置偏差達到3mm時,即進行糾偏控制。
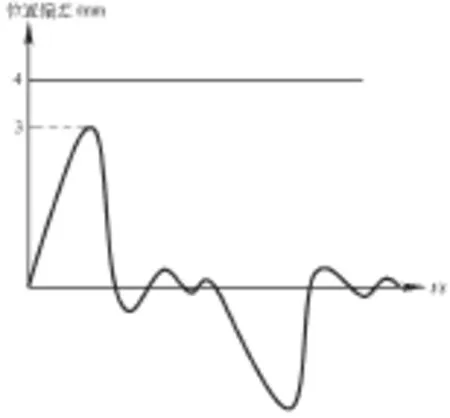
圖4 實際糾偏位置偏差
3 結束語
實驗結果表明,本糾偏檢測控制系統通過采用糾偏檢測控制技術,結合先進的PLC控制和變頻調試技術、PID控制器以及Profibus總線通訊技術等,取代傳統的電氣控制方式,能夠滿足該橋門式起重機的實際需要,減少了橋門式起重機中大車的啃軌現象,提高設備的安全使用性能,減少設備的故障率,降低維護成本和維修工作量,同時操作簡單、運行可靠,具有節能等效果。
1 傅德源.實用起重機電氣技術手冊.北京:機械工業出版社, 2011
2 白志剛.自動調節系統解析與PID整定.化學工業出版社, 2012
3 GB/T3811-2008起重機設計規范
4 劉小波.自動檢測技術.北京:清華大學出版社,2012
5 Siemens Position Decoder Module SM338;POS-INPUT 2006
This paper analyzed the reasons of rail gnawing for gantry crane traveling mechanism, proposed using the correct test control technology. Combined with the advanced PLC control and frequency conversion technology, PID controller and feld bus communication technology, the methods replaced the traditional electrical control, reduced the rail gnawing phenomenon of crane bridge gantry crane in use, improved safety performance of the equipment, reduced the equipment failure rate, the cost of maintenance and repair work, also had the advantages of simple operation, reliable running with energy-saving effect.
Deviation detection Crane PID PLC Inverter Gnawing rail
2013-09-25)
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
