光柵刻劃機工作臺導軌結構形式選擇及試驗
2014-09-04 00:57:52馮樹龍
長春工業大學學報 2014年5期
關鍵詞:結構
馮樹龍
(中國科學院長春光學精密機械與物理研究所, 吉林 長春 130033)
光柵刻劃機工作臺導軌結構形式選擇及試驗
馮樹龍
(中國科學院長春光學精密機械與物理研究所, 吉林 長春 130033)
選擇刻劃機工作臺導軌結構時主要考慮爬行以及超精密研磨。試驗結果表明,滾柱導軌在不同刻劃方式下不存在爬行現象,又便于進行超精密研磨加工以保證直線性精度,成為光柵刻劃機工作臺導軌的首選結構形式。
光柵刻劃機; 滾柱導軌; 爬行
0 引 言
衍射光柵能將復色光分解成不同波長的單色光,是重要的分光元件之一,是光譜儀器上的核心器件。機械刻劃方法是生產母版光柵的一種重要方法,尤其在目前技術條件下是制作低刻線密度的紅外光柵和中階梯光柵的最佳選擇[1-2]。
光柵刻劃機是制造機刻光柵的專用設備,工作臺導軌在分度系統中起承載和導向作用,是光柵刻劃機最重要的組成元件,其直線性精度直接決定了光柵刻線的刻劃精度,影響光柵的波前質量[3-8]。根據誤差分配,要求工作臺的位置精度誤差不大于10 nm,導軌的水平方向直線性精度誤差不大于0.2″(在全長1 560 mm范圍內)。為了滿足上述要求,工作臺在導軌上運行時必須最大程度減小因導軌副動、靜摩擦系數的差異帶來的“爬行”問題,而且導軌必須能進行后續超精密研磨加工,以保證直線性精度的實現。因此,采用哪種結構形式的導軌是一個必須做選擇的關鍵問題。
1 可選導軌的結構形式
從結構形式上看可供選擇的導軌有很多種,如V型滾柱導軌、氣浮導軌、液體靜壓導軌、直線滾柱導軌等。每一種導軌都有各自的特點,從使用環境、是否便于后續超精密研磨加工、成本、養護條件等因素上綜合考慮,最終確定在V型滾柱導軌與氣浮導軌之間做出選擇。
滾柱導軌結構和氣浮導軌結構分別如圖1和圖2所示。

圖1 滾柱導軌結構
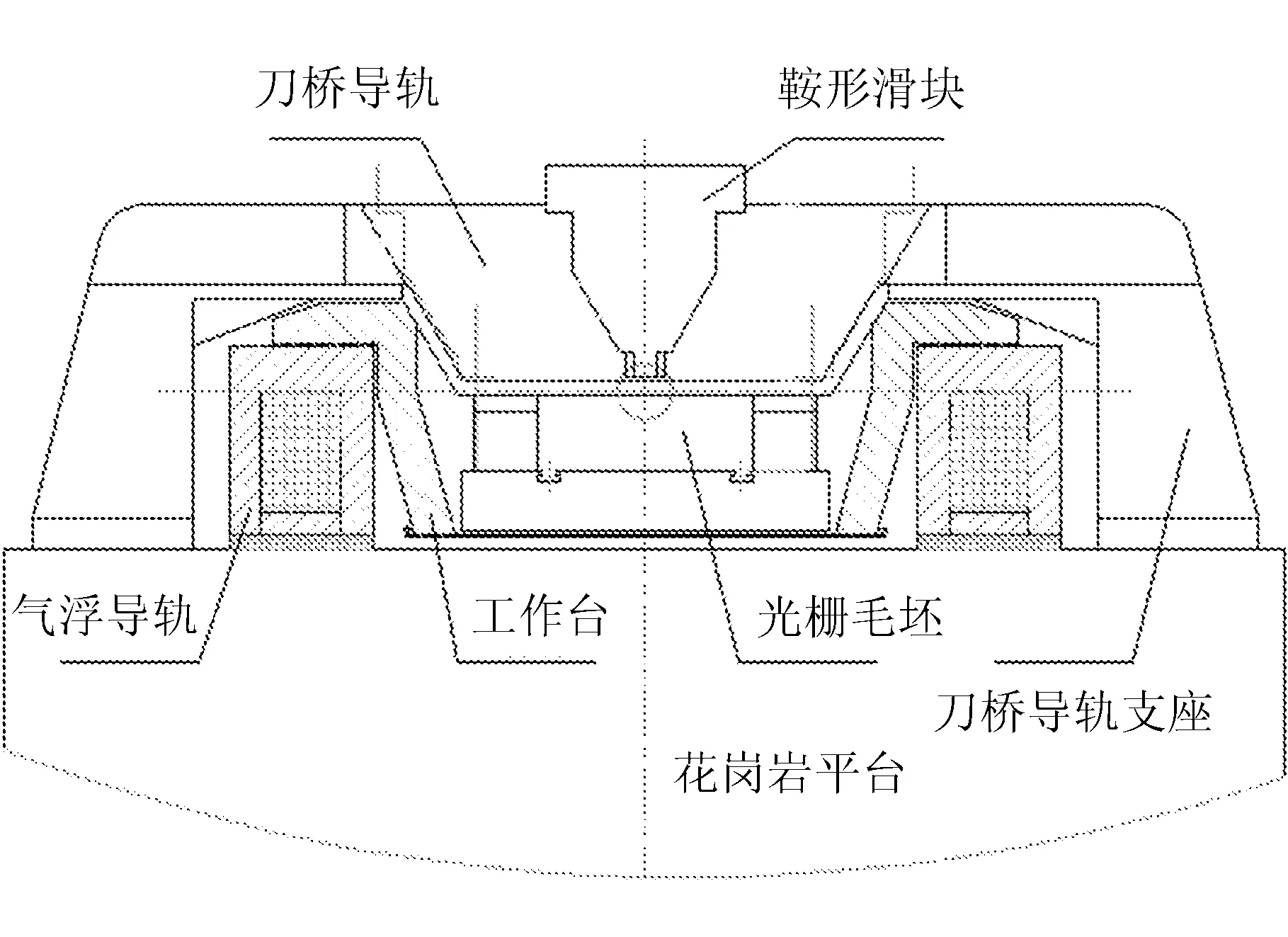
圖2 氣浮導軌結構
滾柱導軌的優點是剛度大、抗干擾能力強、結構簡單、維護方便,也便于后續的超精研磨處理;缺點是雖然摩擦系數較小,但還是在一定程度上存在動、靜摩擦系數的差異,在極低速運行的情況下(工作臺的運動速度范圍為5.56~8 333.33 nm/s)還會有一些不確定的非線性位移狀態的存在。
氣浮導軌的優點是導軌副的摩擦力幾乎為零,系統的隨動性能極好,可以從根本上解決“爬行”問題;但缺點是剛度低、抗干擾能力差、結構復雜,維護不方便,而且由于有外來氣體向恒溫室內的泄漏,會對恒溫精度和激光干涉儀的測量精度產生不利影響。
綜合分析后認為,如果滾柱導軌的力學性能及爬行情況可以滿足使用要求,優先選用滾柱導軌,否則選擇氣浮導軌。
2 滾柱導軌的力學性能分析
導軌在工作狀態下的最大負載為350 kg,需要對導軌在載荷作用下的變形進行力學分析。為了盡量接近使用時的實際情況,進行有限元分析時導軌與工作臺是組合在一起進行的。分析時取工作臺位于起始位置、1/4行程處、1/2行程處3個位置進行計算。計算后可得導軌在3個位置處沿重力方向的最大彈性變形分別為0.834,0.809,0.75 μm。此變形是隨著工作臺的移動而同步移動的,這樣全行程范圍內不同位置處由于導軌變形引起的直線性誤差相對于光柵刻線的槽深來說是很小的,且刻刀本身具有彈性回彈的校正功能,可以進行槽深補償。所以,導軌由于力學變形引起的直線性誤差可以接受。工作臺位于導軌中間位置時導軌的變形云圖如圖3所示。

圖3 工作臺位于導軌中間位置時導軌的變形
3 滾柱導軌爬行特性的試驗分析
為了確定滾動摩擦副的爬行程度,課題組在已有滾柱導軌上做了爬行試驗。
試驗1進行的是工作臺連續式運動的爬行試驗。測量干涉儀采樣率10 Hz,步進電機驅動分度系統蝸桿,并保持14 nm/s速度勻速運行。實驗結果如圖4所示。

圖4 連續式刻劃爬行試驗
圖4(a)為絲杠連續運行6.5 h后干涉儀測量得到的工作臺位移;圖4(b)為位移曲線的微分,微分間隔為0.1 s。由圖4(b)可知連續采樣間隔的最大位移變化為143.37 nm,測試數據的統計分布如圖5所示。

圖5 爬行監測位移量概率譜密度
從圖5可以看出,概率譜密度對稱分布,即位移微分出現正值與負值的概率基本相等,而爬行物理起因決定其位移微分具有單向性,僅有正值存在,振動的位移微分可正可負。因此,該PV值143.37 nm的變化量應為振動產生(正值71.68 nm,負值-71.69 nm),測量過程中應無爬行產生。
試驗2是間歇式運動的爬行試驗。干涉儀采樣率10 Hz,步進電機驅動分度系統蝸桿,分度系統的名義步進值1 660.60 nm,相當于600 g/mm光柵柵距。試驗分為有壓電陶瓷補償分度系統誤差和無壓電陶瓷補償兩種情況進行,分別如圖6和圖7所示。
1)圖6測試條件:刻劃周期10 s(其中電機運轉時間3 s),無壓電驅動器控制。圖6(a)為位移曲線;圖6(b)為每周期對應點的位移值之差,即光柵柵距值的曲線;圖6(c)為每周期后半周期均值(相當于金剛石刀刻劃段)之差所得的柵距值曲線。
2)圖7測試條件:刻劃周期10 s(其中電機運轉時間3 s),有壓電驅動器控制,響應頻率為10 Hz。圖7(a)為每周期對應點的柵距值曲線;圖7(b)為每周期后半周期均值的柵距值曲線。
從圖6和圖7中可以看出,測試時間內(試刻光柵長度約為1.6 mm)刻劃機在無壓電驅動器控制時柵距誤差PV值最高達到74.16 nm,均方根值9.399 nm;通過壓電驅動器控制后柵距誤差PV值最高為29.67 nm,均方根值4.55 nm,柵距誤差得到了明顯改善。位移微分后的結果表明,測試中得到的PV值也是由試驗中振動產生的,在試驗中無爬行現象發生。

圖6 間歇刻劃爬行試驗1

圖7 間歇刻劃爬行試驗2
4 結 語
通過試驗的方法確定了分度系統中工作臺導軌的結構形式,為光柵刻劃機整機結構設計提供了堅實的技術基礎。實際結果表明,滾柱導軌完全可以滿足低速、重載、高精度的設計需要。
[1] 李燕青,郝德阜.衍射光柵制造技術的發展[J].長春理工大學學報,2003,26(1):66-68.
[2] 楊德才.中階梯光柵及其應用[J].現代科學儀器,1992(4):29-31.
[3] George R Harrison, George W Stroke. Interferometric control of grating ruling with continuous carriage advance [J]. Opt.Soc.Am.,1955,45(2):112-121.
[4] 梁浩明,莊夔,張慶英,等.衍射光柵刻劃機[J].光學學報,1981,1(1):51-58.
[5] 營建新,馮樹龍.一種光柵刻劃機刀架等速運動的新結構[J].長春工業大學學報:自然科學版,2012,33(4):402-406.
[6] 唐玉國,陳少杰,巴音賀希格,等.中階梯光柵光譜儀的譜圖還原與波長標定[J].光學精密工程,2010,18(10):21-33.
[7] 時輪,郝德阜,齊向東.高精度衍射光柵刻劃機的最新技術進展[J].儀器儀表學報,2001,22(4):438-439.
[8] George R Harison, Stephen W Thompson. 750 mm ruling engine producing large gratings and echelles [J]. Journal of the Optical Society of America,1972,62(6):751-756.
Structural and experimental study for workbench guides of grating ruling machine
FENG Shu-long
(Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)
Two factors, such as creeping and super-precision, are mainly considered to be the indexes to choose the guides structure of the grating ruling machine. The experiment results show that there is no creeping with different ruling methods for the roller guides which is suitable for super-precision grinding process to ensure the linear accuracy. The roller guides is the first choice for the grating ruling machine.
grating ruling machine; roller guide; creeping.
2014-07-29
國家重大科研裝備研制資助項目(ZBYZ2008-1)
馮樹龍(1973-),男,漢族,遼寧葫蘆島人,中國科學院長春光學精密機械與物理研究所副研究員,博士,主要從事光學儀器設計及制造、精密機械設計、制造及測量方向研究,E-mail:topfsl@126.com.
TH 744.1
A
1674-1374(2014)05-0506-05
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
