基于剛柔耦合的液壓挖掘機機械臂非線性動力學研究
2014-09-05 02:03:20王相兵童水光
振動與沖擊 2014年1期
王相兵, 童水光
(浙江大學 能源工程學系, 杭州 310027)
液壓柔性機械臂系統是機械系統、液壓系統與控制系統的耦合系統,各種力學因素相互作用、相互影響,表現出強非線性動力學特性,臂架的柔性變形不容忽視。同時,由于采用了輕質結構,其過大的變形對動態性能會造成極大影響。為了對其進行動態優化設計和運動精密控制,需要進行精確的動力學分析[1]。柔性機械臂的研究在建模、運動學與軌跡規劃、動力學和控制上雖取得了大量的成果[2-3],然而已有的結構動力學研究基本采用瞬時結構假設,及單獨考慮剛體運動與柔性變形,忽略剛柔耦合產生的非線性動力學效應。目前,國內外學者對液壓挖掘機機械臂的研究大都局限于臂桿的剛性范圍內,沒有考慮到柔性變形對整個系統動態特性的影響[4-5]。對液壓挖掘機機械臂動力學性能的結構特征值靈敏度分析大都通過試驗獲取,未從理論上進行推導,對其結構動力學研究處于探索階段[6-8]。近年來,隨著計算機仿真技術的不斷發展,對機械臂進行剛柔耦合結構動力學仿真正成為研究的熱點。
本文將以液壓挖掘機的臂架系統為研究對象,將臂桿模擬成柔性機械臂,不考慮各臂桿鉸接處和液壓缸連接處的摩擦,充分考慮剛體運動與柔性變形,建立剛柔耦合的動力學模型,通過數值求解的方法對其典型工況運動情況進行計算, 利用ADAMS和NASTRAN軟件建立液壓挖掘機工作裝置剛柔耦合模型并進行仿真分析,對比分析二者結果以驗證本文建模方法的正確性。最后利用數值分析的方法對機械臂的動力學特性進行研究,研究結構參數變化對其結構靈敏度影響,為進一步研究臂架的結構優化和運動精確控制提供依據。
1 基于多柔體理論的虛擬樣機動力學建模
在液壓挖掘機機械臂的運動過程中,剛性運動與柔性變形相互作用形成剛柔耦合的多柔體系統,表現出非線性動力學特性。充分考慮剛體運動與柔性變形的影響, 運用彈性力學、分析力學知識,采用Lagrange定理、假設模態法和虛功原理建立液壓挖掘機機械臂的動力學模型。
1.1 坐標系和廣義坐標的建立
圖1所示為液壓挖掘機機械臂的結構簡圖,臂桿采用液壓缸驅動。液壓挖掘機的工作裝置由動臂、斗桿、末端鏟斗、液壓驅動缸1、液壓驅動缸2、液壓驅動缸3組成。

1.2 臂架系統的動能
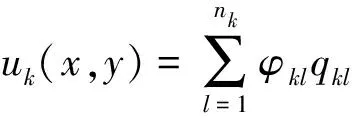
采用假設模態法建立臂桿的彈性變形方程。臂桿的變形u為時間t和x的函數即u(x,y),將k臂桿上k點的變形u用模態基函數φkl的線性組合[11]表示為:
(1)
式中qkl為對應φkl的與時間t相關的廣義坐標,φkl為與局部坐標x相關的k臂桿的l階模態振型基函數,nk為模態階數。在工程結構中一階模態在彈性振動中占據了絕大部分的比重[12],所以取nk=1,即一階彈性模態,研究其性能完全可以滿足工程結構需要,其模態基函數為:
(2)
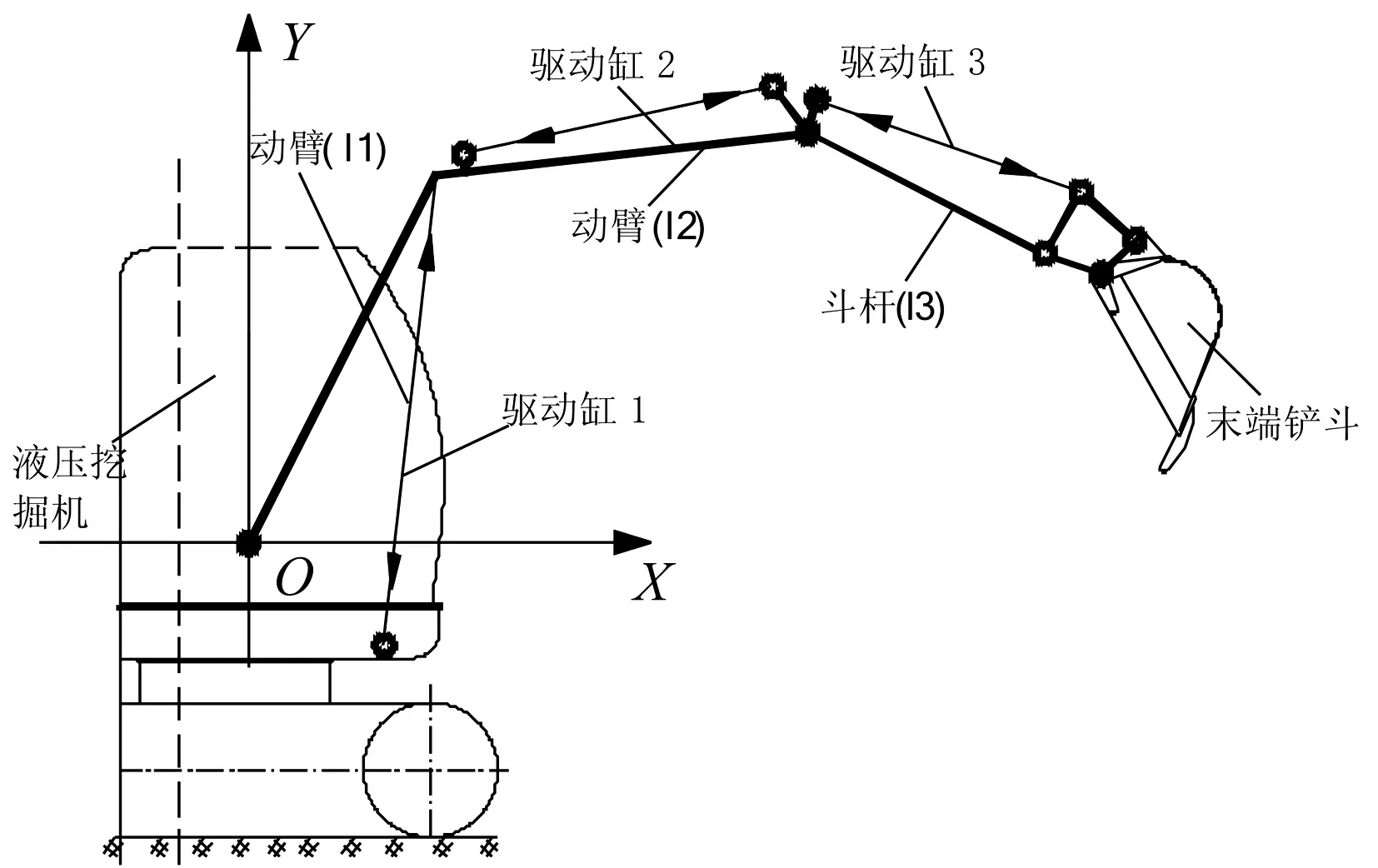
圖1 液壓挖掘機機械臂結構示意圖
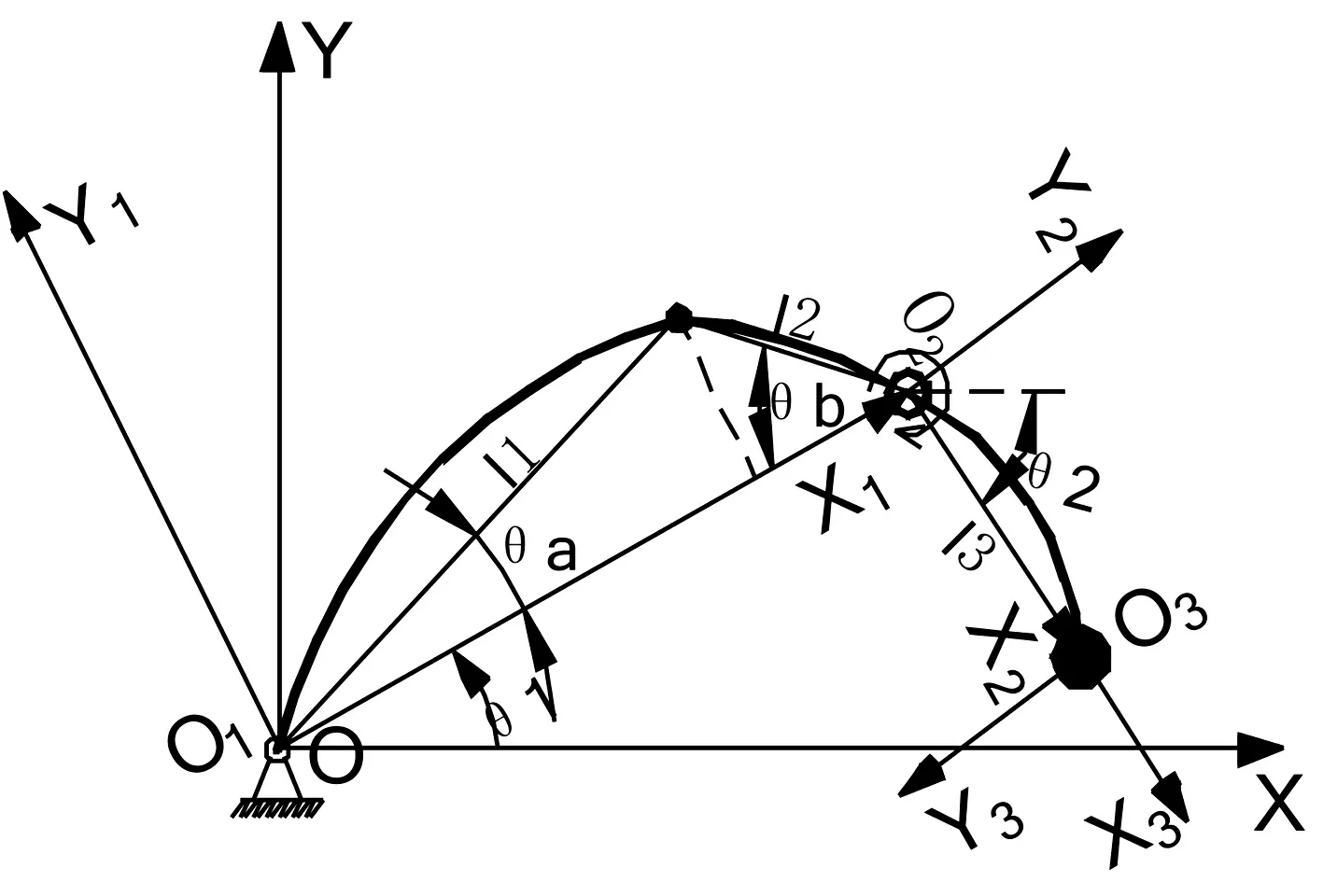
圖2 系統坐標與廣義坐標
圖3 臂桿的l1坐標示意圖
r01=A1r1=A1(ux1+uy2)
(3)
式中,r01為臂桿l1上點P在慣性坐標系Oxy中的位置矢量,uy1=[0φ1q1]T,A1為局部坐標系O1x1y1到總體坐標系Oxy的旋轉變換矩陣,即;
(4)
(5)
由此可得P1點速度:

(6)

(7)
A1y=A1[0φ1]T,D11=BA1[x1φ1q1]T
對動臂的l2段:

其動能為:

(8)
其中
同理,r02為臂桿l2上任意點P在慣性坐標系Oxy中的位置矢量,r2為點P2在動坐標系O2x2y2中的位置矢量
設A2為局部坐標系O2x2y2到總體坐標系Oxy的旋轉變換矩陣,
(9)
動點P2表達式為:
(10)
則其動能表達式為:
(11)
式中:
A3y=A2[0φ3]T,D33=BA2[x2φ3q2]T
對于末端鏟斗,首先簡化動力學模型,將鏟斗和重物載荷視為集中質量mp,忽略連桿彈性變形對端點載荷的動能和勢能的影響,末端位置矢量為:
(12)
末端鏟斗集中質量動能為:
(13)
則臂架系統的總動能為:
(14)
其中質量矩陣M由各質量陣裝配得到:

(16)
(17)
1.3 臂架系統的勢能
液壓挖掘機運動過程中會發生彈性勢能和重力勢能的變化,臂架的彈性變形勢能為:

(18)
式中E表示材料的彈性模量,E1、E2、E3、E4分別表示臂桿l1、l2、l3截面的平均慣性矩。將模態基函數代入(18),用矩陣表示其廣義坐標形式的彈性變形勢能為:
(19)
式中K表示剛度矩陣,其中:
(21)
忽略臂架變形引起的勢能變化,則其重力勢能可表示為:
1.4 液壓驅動的動力學模型
挖掘機機械臂采用液壓缸驅動裝置,機械臂與液壓缸鉸接于臂架上一點,臂桿和液壓缸鉸接的結構示意圖如圖4所示 ,Ai、Bi表示液壓缸與相鄰臂桿的鉸接點,a32+a41=L1,a21=0,a12=l1,a22=l2。則三個液壓缸的位移矢量分別為:
(23)
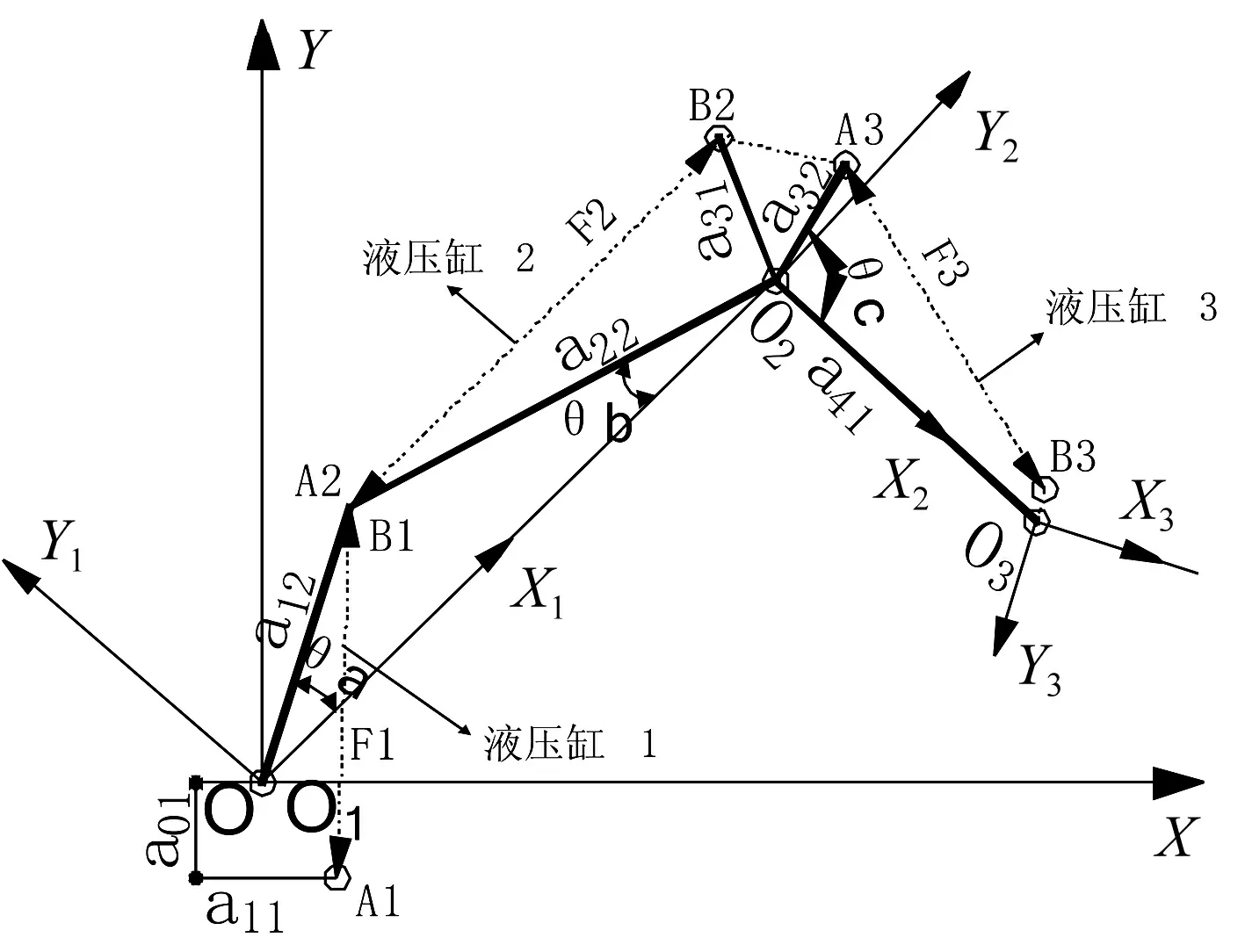
圖4 臂桿和液壓缸鉸接示意圖
R2=rOB2-rOA2=
(24)
(25)
則液壓缸的驅動力、動力矩為:
(26)
T1=F1ya12cos(θ1+θa)+F1xa12sin(θ1+θa)
(27)
T2=F2ya12cos(θ1-θb)+F2xa12sin(θ1-θb)
(28)
T3=F3ya32cos(θc-θ2)+F3xa32sin(θc-θ2)
(29)
1.5 液壓挖掘機機械臂柔性多體動力學模型
在液壓挖掘機的柔性機械臂的廣義坐標系η=[θ1q1θ2q2]T中,設Lagrange函數L=T-U-V,將動能T、彈性變形勢能V及重力勢能U代入第二類拉格朗日方程:
(30)
得到:
(31)
式中Qk表示廣義坐標力, 根據虛功原理,廣義驅動力所做的功:

(32)
式中:u1、u2、u3分別表示機械臂各段模態函數。Qk取液壓缸驅動力為主動力,以力矩形式表示,則其廣義力列陣為:

則整理后的臂架柔性多體動力學方程為:
(34)
(35)
式中:mθθ、mθq、mqq組成質量矩陣M,Kqq為剛度矩陣,v與D分別為速度的二次項和一次項系數矩陣。由于上述建模基于小變形假設,彈性運動的廣義坐標q很小,忽略方程中的相關項,則動力學方程中的相應系數可表示為:
(36)
(37)
(38)
(39)

方程(34)、(35)也明顯表現出剛性運動和彈性運動相互耦合即柔性多體動力學的基本特征。如果不考慮廣義坐標q,即把式(34)、(35)中與廣義坐標q的相關項省略,就得到了臂架的剛性模型。
2 動力學模型的數值求解與仿真分析
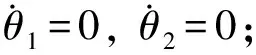
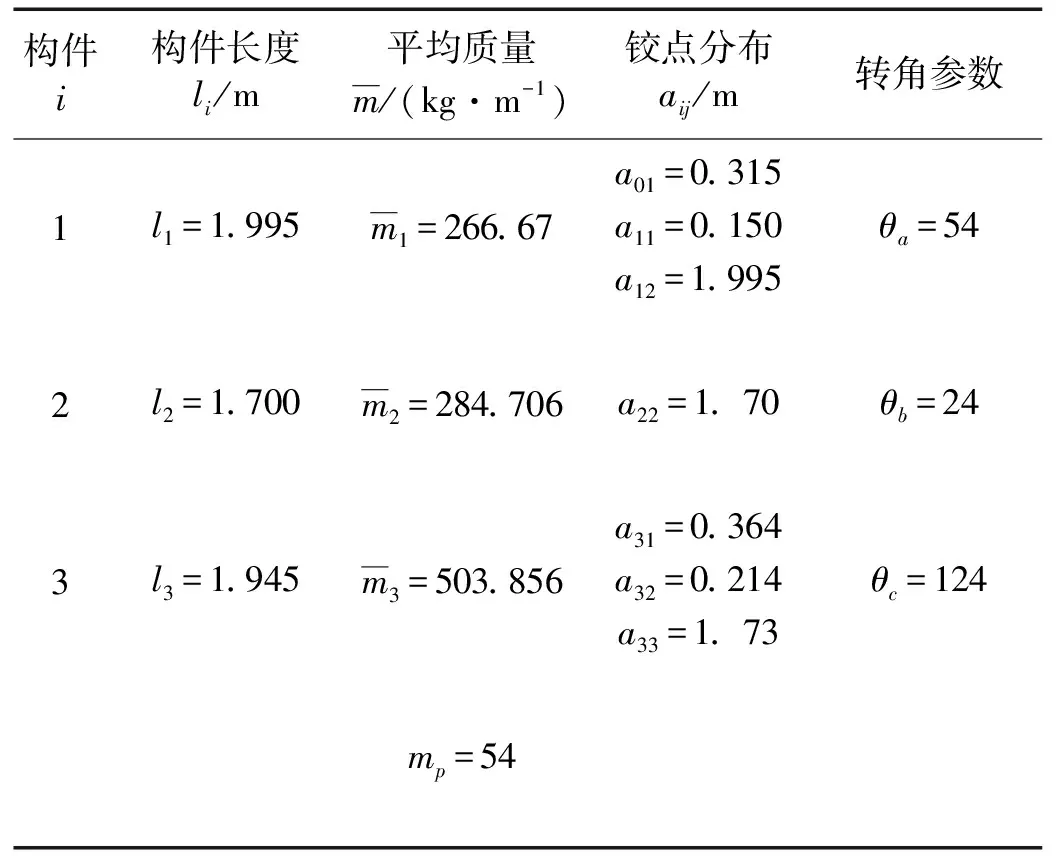
表1 液壓挖掘機工作裝置參數表
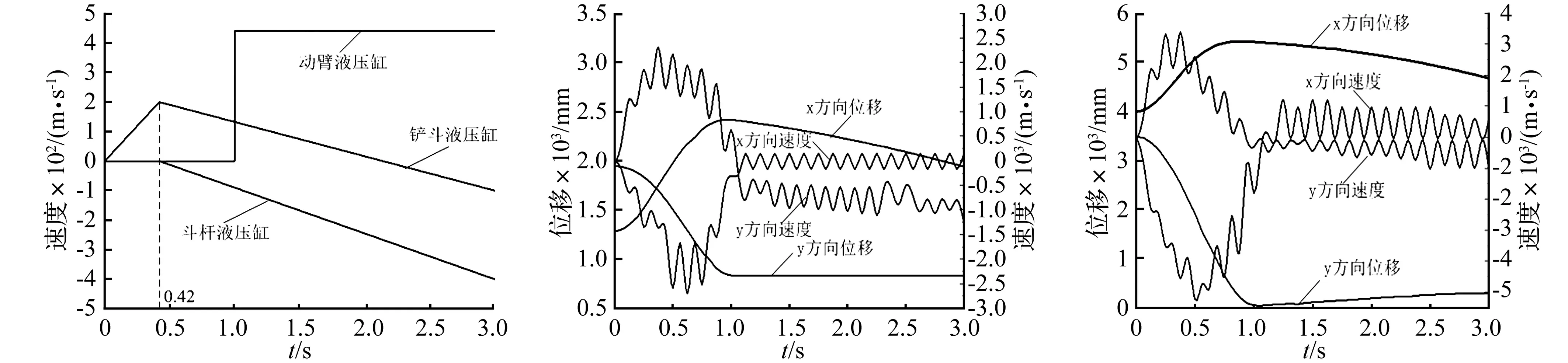
圖5 液壓缸的控制信號
同樣,采用仿真的方法對液壓挖掘機柔性機械臂進行動力學仿真可得相應的動力學仿真曲線。首先需建立液壓挖掘機機械臂剛柔耦合的虛擬樣機模型。液壓挖掘機機械臂剛柔耦合模型的建立及仿真過程如下:首先利用有限元分析軟件NASTRAN建立動臂和斗桿的有限元模型。在模型的每個鉸孔中利用RBE2單元建立蜘蛛網剛性區域,利用ROD單元模擬剛性銷軸,得到動臂和斗桿的柔性體。對柔性體進行模態分析,生成模態中性文件.mnf ,將模態中性文件導入ADAMS中替換相應的剛性體,建立液壓挖掘機剛柔耦合模型。選擇典型挖掘工況進行仿真,圖8表示液壓挖掘機機械臂剛柔耦合動力學仿真,圖9和圖10表示動臂、斗桿末端剛柔運動位移和速度仿真曲線。
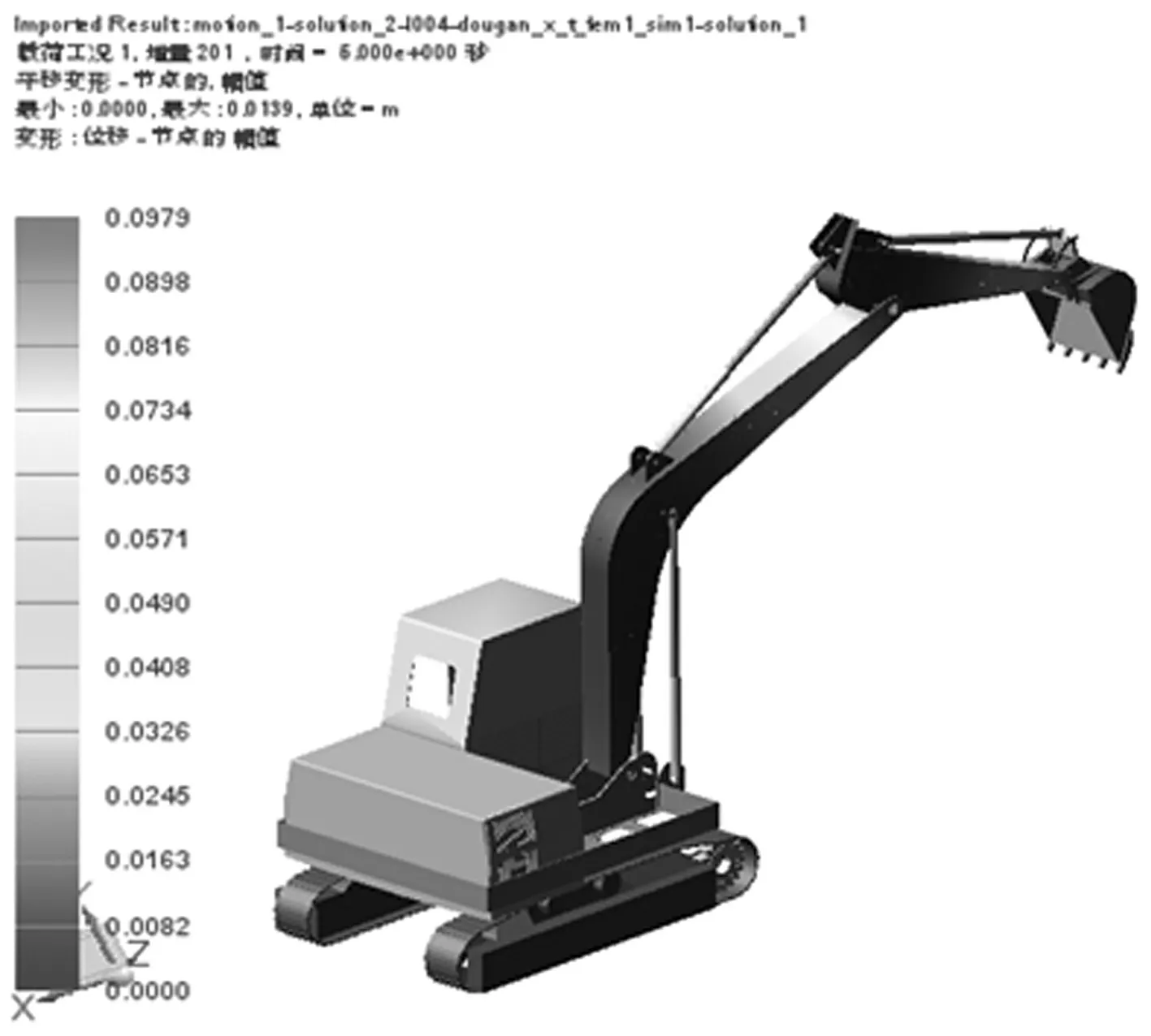
圖8 液壓挖掘機機械臂剛柔耦合動力學仿真
通過對比數值求解和仿真結果可知,液壓挖掘機柔性機械臂在標準挖掘過程中各動臂和斗桿的位移和速度的響應的變化趨勢基本一致,二者的誤差值在0.1之內,說明建模和求解的過程和方法是正確的。
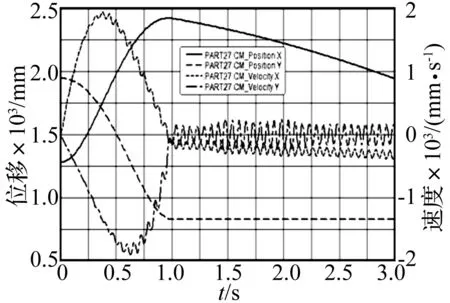
圖9 動臂末端的運動位移和速度仿真曲線
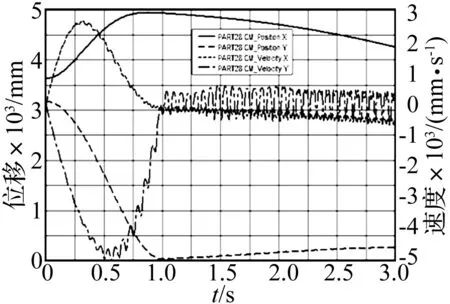
圖10 斗桿末端的運動位移和速度仿真曲線
3 基于數值求解的動態特性分析
研究液壓挖掘機動態特性的關鍵問題之一就是確定設計結構參數對動態性能的影響程度。進行結構特征靈敏度分析可以求出結構各部分質量、剛度及阻尼的微小變化對結構特征值與特征向量改變的敏感程度,從而指導結構動力參數的修改[13]。質量和剛度的靈敏度矩陣由中心差分法得到[14]:
(40)
(41)
進一步可得動特性能參數對結構參數的靈敏度矩陣表達式[15-17]:
(42)
式中ωj代表相關部件第j階固有頻率,φj代表相應的第j階固有振型。可知模態頻率對性能參數的靈敏度靈敏度與質量、阻尼和剛度矩陣的靈敏度以及振動速度、激勵頻率以及結構的物理參數相關。
對式(35)-(42)所建立的動力學模型利用MATLAB編程進行計算得到相關幾何參數的一階固有頻率靈敏度及各部位的模態響應。
圖11為固有頻率對動臂鉸點位置變化的靈敏度曲線,圖中1、2、3、4分別表示工作裝置固有頻率對動臂鉸點距離L、動臂彎度、動臂長度l1和l2等鉸點位置參數的靈敏度值隨動臂擺角變化的分布;圖12為工作裝置固有頻率對動臂轉角和斗桿姿態角的靈敏度值隨斗桿擺角變化分布曲線;1、2 分別代表固有頻率對動臂和斗桿姿態角的靈敏度曲線;圖13為固有頻率隨斗桿轉角變化的曲線,圖14為動臂與斗桿連接孔處豎直方向位移模態響應,圖15為動臂與斗桿連接孔處豎直方向位移模態響應頻譜圖。
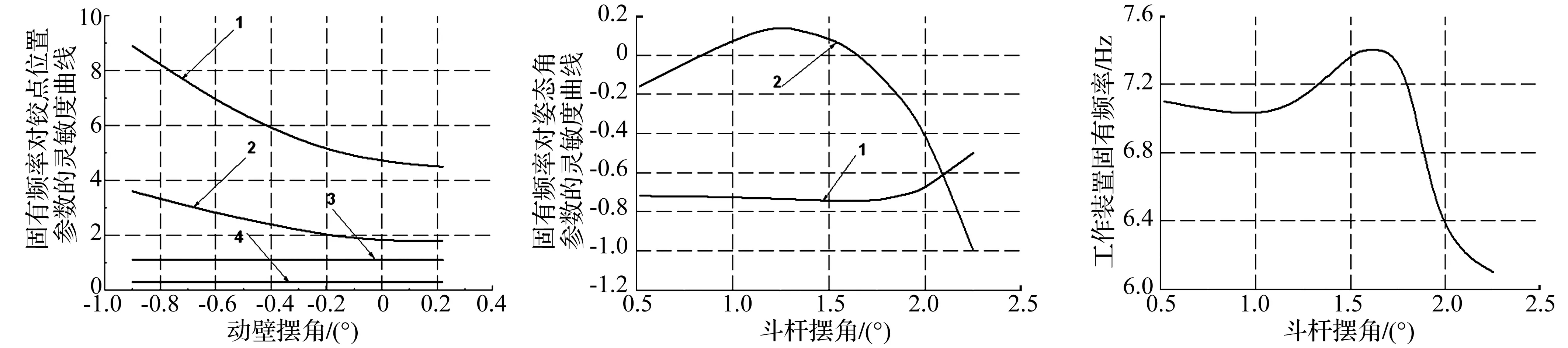
圖11 固有頻率對鉸點位置參數靈敏度隨動臂轉角變化曲線
分析圖11表明:鉸點位置分布的靈敏度對工作裝置的工作模態影響較大,對動臂而言,鉸點距離L的靈敏度相對其他參數影響更為明顯。圖12表明:姿態角的靈敏度曲線大部分位于0刻度曲線以下,說明在液壓缸的伸長過程中,固有頻率呈下降趨勢;工作裝置的固有頻率隨動臂姿態角的靈敏度的變化穩定,隨斗桿姿態角的變化比較明顯。圖13表明:斗桿擺角對工作裝置的固有頻率影響較大。分析圖14、圖15表明:挖掘機在液壓缸力矩驅動下的模態響應表現出明顯的非線性,其模態振級為10-2m,是在剛性響應的基礎上的小幅振動;其豎向振動最為強烈,一階固有頻率對機械臂的振動影響最大。
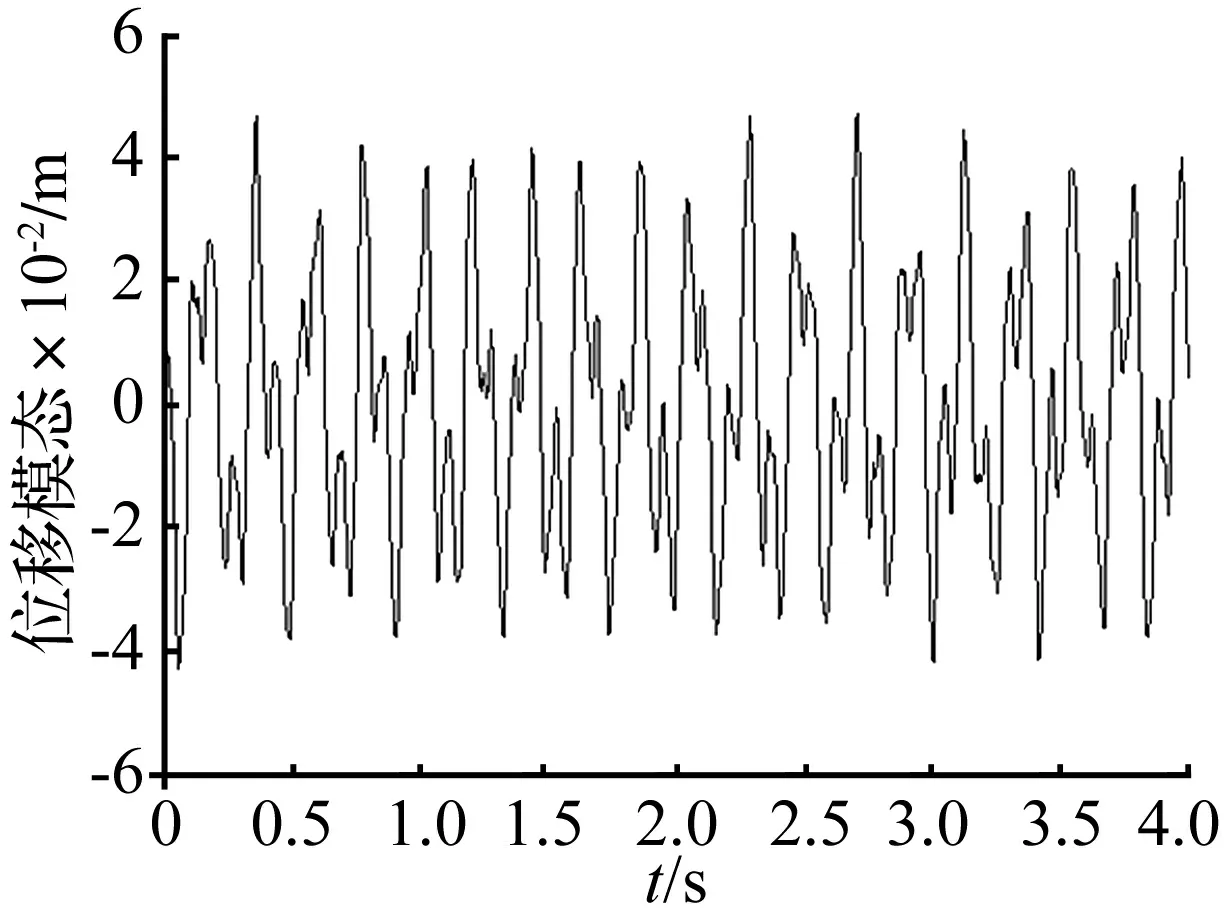
圖14 動臂與斗桿連接孔處豎直方向位移模態響應
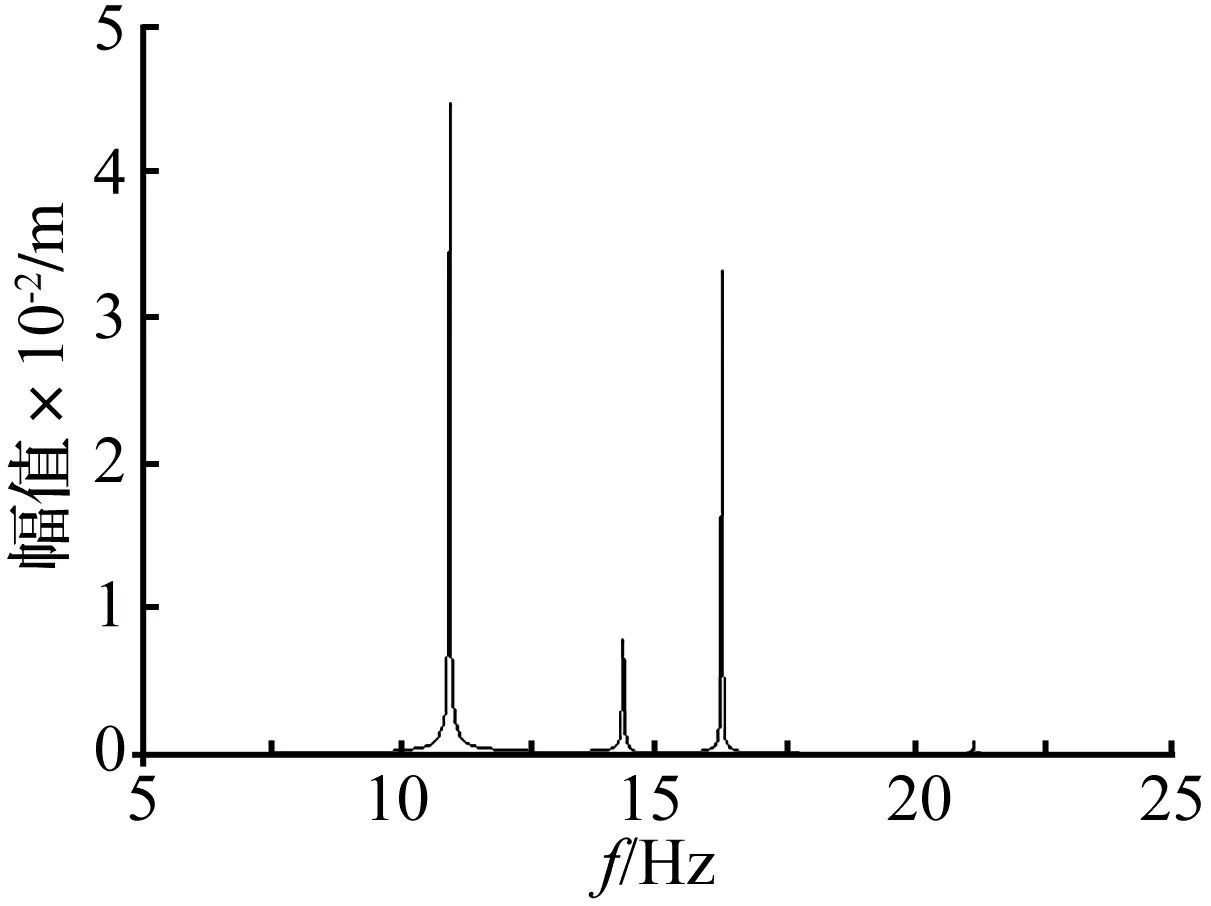
圖15 動臂與斗桿連接孔處豎直方向位移模態響應頻譜圖
4 結 論
論文基于多柔體理論對液壓挖掘機機械臂的運動情況進行分析推導,建立了液壓挖掘機非線性動力學微分方程,通過數值求解與仿真分析的方法驗證了建模方法的正確性。根據建立的結構動力學方程進行結構靈敏度及其模態響應分析,研究了影響挖掘機機械臂動力學特性的主要因素,主要為鉸分布及相關結構尺寸。本文所采用的建模和數值求解分析方法為液壓挖掘機機械臂結構改進、提高工作平穩性、實現其運動精確控制等提供依據。
參 考 文 獻
[1]Farid M, Lukasiewicz S A. Dynamic modeling of spatial manipulators with flexible links and joints[J]. Computers & Structures , 2000, 75 (4):419-437.
[2]Basher H A. Modeling and simulation of flexible robot manipulator with a prismatic joint[C]. Proceedings. IEEE SoutheastCon 2007.2007,3.
[3]劉 杰,戴 麗,趙麗娟,等.混凝土泵車臂架柔性多體動力學建模與仿真[J].機械工程學報,2007,43(11):131-135.
LIU Jie,DAI Li,ZHAO Li-juan,et al.Modeling and simulation of flexible multi-body dynamics of concrete pump truck aam[J].Chinese Journal of Mechanical Engineering,2007,43(11):131-135.
[4]Leung A Y T, Wu G Z, Zhong W F. Nonlinear dynamic analysis of flexible multibody system[J]. Acta Mechanica Solida Sinica, 2004, 17(4):330-336.
[5]Budny E, Chlosta M, Gutkowski W. Load-independent control of a hydraulic excavator[J].Automation in Construction.2003,12(3):245-254.
[6]楊 為,王家序,秦大同. 液壓挖掘機工作裝置固有頻率的試驗靈敏度[J]. 農業機械學報, 2006, 37 (2):21-24.
YANG Wei,WAND Jia-xu,QIN Da-tong. Investigation on experimental sensitivity of work device natural frequency of hydraulic excavator[J]. Transactions of the Chinese Society for Agricultural Machinery,2006,37(2):21-24.
[7]He Q H,Zhang D Q,Hao P,et al.Modeling and control of hydraulic excavator's arm [J].J. Cent. South Univ. Technol. 2006,13(4):422-427.
[8]Gao Y J,Jin Y C,Zhang Q. Motion planning based coordinated control for hydraulic excavators[J]. Chinese Journal of Mechanical Engineering,2009,22(1):97-101.
[9]Cai G P,Hong J Z. Assumed mode method of a rotating flexible beam[J].Acta Mechanica Sinica,2005,37 (1):48-56.
[10]Zhang X P, Mills J K,Cleghorn W L. Dynamic modeling and experimental validation of a 3-PRR parallel manipulator with flexible intermediate links[J].Intell Robot Syst , 2007,50(4):323-340 .
[11]陸佑方.柔性多體系統動力學[M].北京:高等教育出版社,1996:1-30, 233-266.
[12]宋建龍.柔性機械臂動力學建模與仿真研究[D].天津:天津大學,2001.
[13]鄒春平. 船舶結構振動響應靈敏度分析[J].中國艦船研究,2006,1(2):26-27.
ZOU Chun-pin. Sensitivity analysis for the structural vibration response of ships[J]. Chinese Journal of Ship Research,2006,1(2):26-27.
[14]Jones K,Turcotte J. Finite element model updating using antiresonant frequencies[J]. Journal of Sound and Vibration.2002,252(4),717-727.
[15]張令彌,何柏慶,袁向榮. 設計靈敏度分析的迭代模態法[J]. 南京航空航天大學學報, 1994,26(3):320-321.
ZHANG Ling-mi ,HE Bai-qing ,YUAN Xiang-rong. Interative modal method for sensitivity analysis of design parameters[J]. Journal of Nanjing University of Aeronautics& Astronautics, 1994,26(,3):320-321.
[16]童 昕,羅 寧,錢仲焱,等.液壓挖掘機動態設計靈敏度分析方法[J].礦山機械, 1997,11:25-26.
TONG Xin,LUO Ning,QIAN Zhong-yan,et al. Analysis method for dynamic design sensitivity of hydraulic excavator [J]. Mining & Processing Equipment, 1997,11:25-26.
[17]唐 冕.大跨度自錨式懸索橋的靜動力性能研究與參數敏感性分析[D]. 長沙:中南大學,2007,46-49.
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00