FM-CW雷達探測器控制與信號處理系統設計
2014-09-06 10:49:58王華
單片機與嵌入式系統應用 2014年5期
關鍵詞:信號
王 華
(國營8450廠,三明 365001)
?
FM-CW雷達探測器控制與信號處理系統設計
王 華
(國營8450廠,三明 365001)
本文闡述了該雷達探測器的數字信號處理過程,重點分析了動目標自動檢測原理,并給出了該檢測算法的實現步驟。根據該雷達探測器的特點和需求,設計了基于DSP的控制與信號處理系統,詳細給出了其軟、硬件實現方案。該系統具有高性價比以及較好的通用性,已經成功應用于項目。
雷達探測器;動目標自動檢測;恒虛警;DSP;FM-CW
引 言
調頻連續波(FM-CW)雷達設備簡單,發射頻譜窄,發射峰值功率與平均功率相當,不存在近距離盲區和速度模糊,而且還具有近距離信號抑制功能等優點,因此采用該技術設計地面近程雷達探測器具有很強的優勢。如果想發揮FM-CW雷達的優勢,就要具有相應的數字信號處理功能。
本文針對采用I、Q解調零拍接收技術的FM-CW雷達設計,以數字信號處理器(DSP)芯片為基本運算單元,以單片機為主控制器,構造了靈活、控制與處理能力強、通用性好、性價比高的控制與信號處理系統。該系統通過對目標多普勒回波信號進行濾波、相干積累等處理完成動目標自動檢測過程和人機交互。
1 數字信號處理
本文涉及的FM-CW雷達探測器主要功能是檢測動目標并且計算動目標運動的速度和方向(朝向或遠離雷達站)。I、Q回波信號通過正弦解調后得到I、Q多普勒信號,數字信號處理器(DSP)通過對I、Q多普勒信號的分析處理完成動目標檢測,其實現過程如圖1所示。
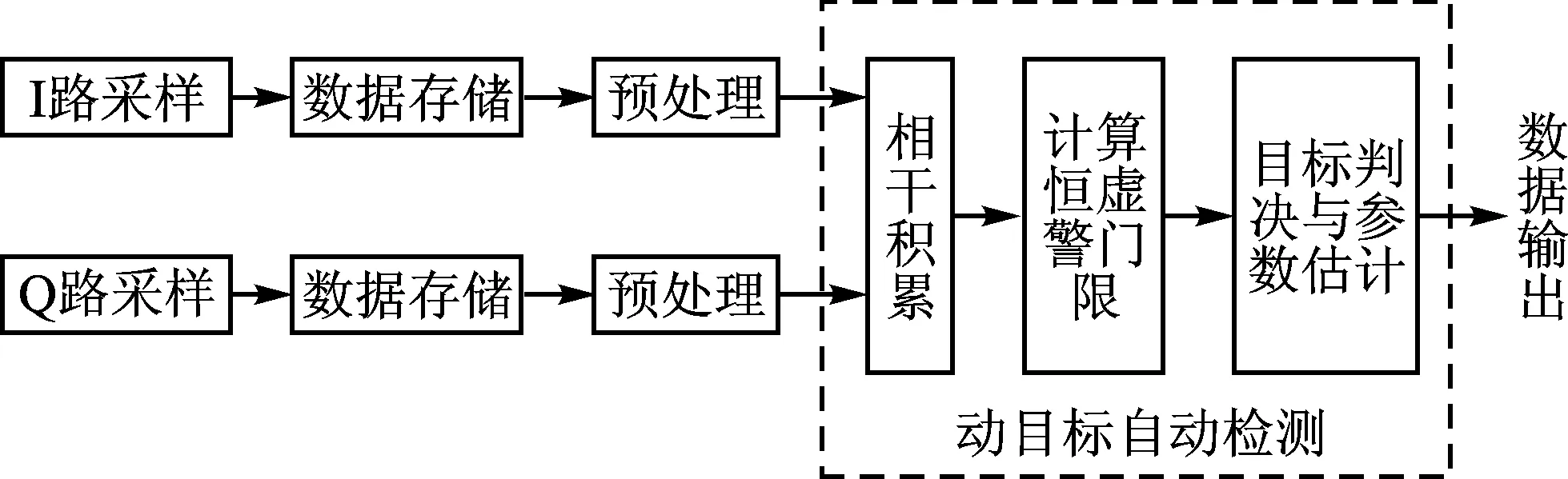
圖1 目標檢測框圖
對I、Q兩路信號先后同步采樣,并把數據保存至相應的數據存儲空間,采樣完一幀數據后,DSP分別取出存儲的兩路N階FFT數據進行預處理(主要是進行數據轉換、去直流運算);然后對I、Q信號進行相干積累,獲得相應的積累增益,然后針對功率譜分布情況,計算恒虛警率門限進行恒虛警率處理(CFAR);最后把最大的子濾波器功率值和計算的恒虛警率門限比較,若小于門限值,則認為沒發現目標;反之,則認為發現目標,同時計算該目標的參數信息(包括速度、運動方向、相對幅度等),并按照規定的協議對目標參數信息打包輸出。
1.1 預處理算法
當采用單電源進行A/D轉換時,在模擬端不可避免的存在直流分量,而直流量的存在將降低數字信號處理的動態范圍,因此降低直流分量很有意義。利用數字處理容易實現,其過程如下:
① 根據下式分別計算I、Q數據的數學期望E1(x)和EQ(x)。
(1)
其中,N表示一幀數據的個數,xi表示第i個數據。
② 根據公式yi=xi-E(x)(i的取值范圍[0,1]),將I、Q數據分別減去數學期望值E(X),得到新的I、Q數據幀:
(2)
1.2 動目標自動檢測
動目標自動檢測主要包含相干積累、恒虛警率處理(CFAR)和目標判決與參數估計等過程實現。
1.2.1 動目標檢測基本原理
眾所周知,多普勒頻率在雷達中目標的徑向速度和回波多普勒頻率存在如下所示的關系:
(3)
式中:c=3.08×108m/s;表示雷達的工作頻率;fd和Vd分別表示目標的多普勒頻率和目標徑向速度。
根據式(3)可知,只需計算出多普勒頻率fd就可獲得目標的徑向速度,而且通過fd可以判斷是否發現目標。雷達的多普勒效應表明:當目標朝向雷達站運動時,多普勒頻率(fd)為正值,而當目標遠離雷達站運動時,多普勒頻率(fd)為負值,因此可以通過fd值的正負來確定目標運動方向。
為了實現目標多普勒回波相干積累,并計算其頻率值大小和正負,采用快速傅里葉變換(FFT)方法實現,并且FFT技術實現N(一幀數據長度)個濾波器組(也稱子濾波器),計算量小,方便硬件實現,是可行的[1]。
1.2.2 動目標自動檢測算法實現
雷達的工作環境背景非常復雜,回波信號中包含大量的隨機噪聲、雜波信號以及其他電磁波的干擾信息。目前的雷達探測器(系統)都要求能夠在復雜和不確知的背景環境中檢測目標的存在并保持給定的虛警概率。為此,必須自動實時計算恒虛警門限以保持恒虛警率實現[2]。
算法實現步驟如下:
① 對新的I、Q數據幀組合成復數,然后進行FFT運算,并對各子濾波器信號幅值求模。
② 找出信號幅度前4的4個子濾波器并標記其濾波器位置(Mj)和幅度大小(VMj),并且把信號幅度最大的濾波器進行二次標記(濾波器位置為Mmax,信號幅度為Vmax)。
③ 根據式(4)求所有子濾波器的數學期望E(xx)和平均方差σ2,去除幅值最大的前4個數據有利于減少信號閃爍。
(4)
式中:N表示子濾波器個數(參與FFT運算的數據幀長度);Vi表示第i個濾波器的信號幅度。
④ 根據式(5)計算恒虛警率門限VT。
(5)
式中:α、β表示加權系數;α、β值決定了目標判決門限VT,VT的具體值需要結合發現概率和虛警概率確定[3]。
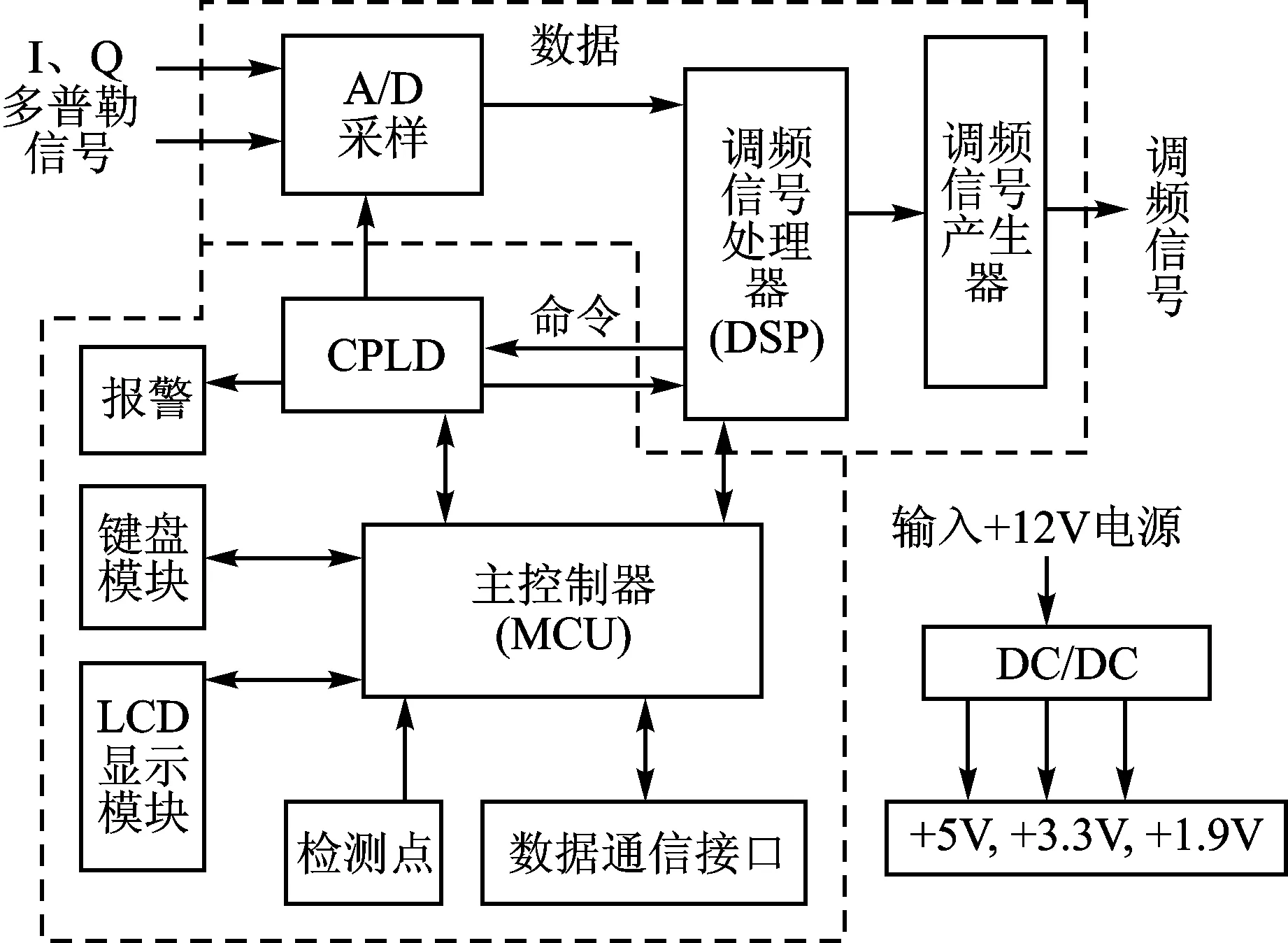
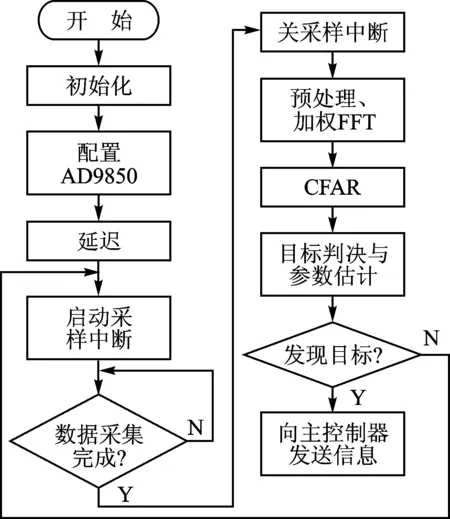
⑤ 把最大的信號幅度Vmax與恒虛警率門限VT相比較,若不小于VT值則認為目標存在,并且由Mmax值估計多普勒目標頻率,然后根據式(3)確定目標的徑向速度;同時也可以根據Mmax值確定目標遠離或靠近運動,當Mmax 該控制與信號處理系統設計原則:可靠穩定、性價比高、小型化。其總體設計如圖2所示。 圖2 系統總體框圖 該系統主要是針對某型號FM-CW雷達探測器設計的,主要分為主控制器部分、調頻信號處理部分和DC/DC電源。其工作流程: DSP控制模數轉換器(A/D),對I、Q多普勒信號進行同步采樣,同時把采集的數據保存在片內存儲器中,直到一幀數據采集完成;DSP對該幀數據進行濾波、動目標檢測算法處理,處理完成后把目標數據送至主控制器;主控制器(MCU)接收到目標參數信息后,按照規定的協議把目標參數信息打包并通過數據通信接口輸出,同時按照預定的要求向CPLD輸出控制信號,MCU還應及時接收鍵盤模塊輸出的數據和按周期采集各個檢測點的數據,并且控制LCD顯示模塊正確顯示各種狀態;數據通信接口采用RS232協議。 CPLD主要是對控制命令進行譯碼和邏輯運算,按照正確的邏輯時序控制A/D采樣和報警電路。 DC/DC電源部分,外部輸入+12 V的電源電壓,通過多個集成電源芯片分別產生+5 V、+3.3 V、+1.9 V電壓供系統工作。 2.1 主控制部分 主控制器部分,包含型號為C8051F023的單片機和型號為EPM3064的CPLD,其主要功能如下: ① 控制系統自檢。包括電壓、電流檢測、高頻發射源和高頻接收模塊工作狀態檢測。 ② 實現對鍵盤模塊管理、對LCD顯示模塊的控制。 ③ 對數字信號處理的管理,并從信號處理器獲取目標參數信息。 ④ 對目標信息進行二次處理并進行數據打包,通過數據通信接口發送,從數據通信接口接收外部指令并進行相應操作。 ⑤ 完成對DSP控制命令的譯碼和控制報警電路工作(主要由CPLD完成)。 2.2 數字信號處理部分 數字信號處理部分主要包含A/D采樣、數字信號處理和調頻信號產生器。其中A/D采樣采用型號為MAX1306的芯片完成,數字信號處理采用型號為TMS320F2812的32位DSP實現[4]。 調頻信號產生器主要利用DDS技術,采用型號為AD9850的芯片實現。該部分的核心功能是參考圖1完成動目標自動檢測運算,數字信號處理器(DSP)軟件流程圖如圖3所示。 DSP開機上電復位后,初始化自身的配置,使得系統進入預定的工作狀態;在正常工作狀態模式下,按照AD9850的參考協議(本文采用的是串行3線制)配置寄存器,產生所需要的正弦調頻信號,然后延遲等待; 直到雷達探測器高頻部分工作穩定后,DSP啟動采樣中斷,按照設定的周期控制A/D采集數據,直到I、Q兩路分別采集完成1 024點數據(一幀),DSP關閉采樣中斷,然后數據進行處理完成動目標檢測過程。首先DSP對采集的I、Q兩路數據進行預處理,接著利用海明窗函數進行加權并完成復數FFT運算,對運算結果做恒虛警率處理(CFAR),計算出恒虛警門限值,然后進行目標判決得出有無目標的結論。 圖3 信號處理器軟件流程圖 若發現目標,則將目標的速度、運動方向、信號相對強度送至主控制器,最后重新啟動數據采樣,進入下一次運算。 [1] 丁鷺飛,耿富錄.雷達原理[M].3版.西安:西安電子科技大學出版社,2002:294. [2] 陳那.信號測試、處理與系統控制分析技術使用全書[M].北京:清華大學出版社,2005:420. [3] Merrill I Skolnik. 雷達手冊[M].王軍,等譯. 北京:電子工業出版社,2003:32. [4] 江思敏.TMS320C2000系列DSP開發應用技巧[M].北京:中國電力出版社,2008. [5] 潘琢金.C8051F020/1/2/3混合信號ISP FLASH微控制器數據手冊[OL].[2013-11].www.xhl.com.cn. 王華(工程師),主要研究方向為嵌入式系統分析、設計。 Control and Signal Processing System Design of FM-CW Radar Detector Wang Hua (State-owned NO.8450 Factory, Sanming 365001, China) The digital signal processing of the FM-CW radar detector is given,automatic detection principle of the moving target is analyzed,and steps of the detection algorithm are given. According to the characteristics and needs of the radar detector,the paper designs the control and signal processing system based on DSP, the software and hardware implementation are presented in detail.The system has good cost performance and wide versatility, and the design has been successfully applied to the project. radar detector;moving target detection;CFAR;DSP;FM-CW TN959.1 A 迪娜 2013-11-28)2 系統設計
結 語

猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06