遺傳算法優化的模糊系統在發酵pH控制的應用
2014-09-06 05:41:39
機械與電子 2014年7期
(北京化工大學機電工程學院,北京 100029)
遺傳算法優化的模糊系統在發酵pH控制的應用
陳俊昕
(北京化工大學機電工程學院,北京 100029)
針對生物發酵過程中pH值的變化存在嚴重的非線性、時滯性和時變性等特點,采用模糊自適應PID控制方案,能夠實時地在線整定PID控制參數,通過執行機構控制加入發酵罐中堿液的量實現pH控制,并采用遺傳算法對PID初始參數進行優化。仿真結果表明,遺傳算法優化后的模糊自適應PID控制具有上升快、調節精度高、穩定性好、過渡過程時間短和超調量小等優點,因此是有效的、可行的方案。最后,進行了軟硬件的設計并做了驗證實驗。
生物發酵;模糊自適應;PID控制參數;遺傳算法
0 引言
發酵過程是通過人為控制各種微生物的生長,可以大量產生特定的目標代謝產物的生化反應過程[1]。發酵環境對微生物生長繁殖的影響是非常顯著的,pH值是其中最重要的影響因子之一[2]。然而pH值的控制存在非線性、時變性和純滯后的特性,成為控制領域中的最難控制的參數之一。常規的PID控制是以同一組控制參數來實現整個過程控制,很難兼顧不同控制階段的控制要求,控制效果較差。增量式三區段非線性變增益PID控制,能夠降低中和反應中時滯和非線性對于系統的影響,但是,區段的劃分成為了這種控制方法的難點,劃分不合理就難以取得滿意的控制效果[3]。因此,提出了遺傳算法優化的模糊自適應PID控制,成功應用于生物發酵過程中,通過執行機構,如流量泵來控制加入發酵罐中氨水的量,從而實現了發酵過程中pH的精確控制,獲得更好的控制效果。
1 控制算法的設計
1.1 模糊自適應PID
模糊自適應PID是一種簡單的學習控制,結構如圖1所示。其主要優點是對參數的變化和環境的變化不敏感,可適用于非線性對象,并且收斂速度快、魯棒性好,特別是它能在運行中不斷修正自己的控制規則以改善控制性能[4]。
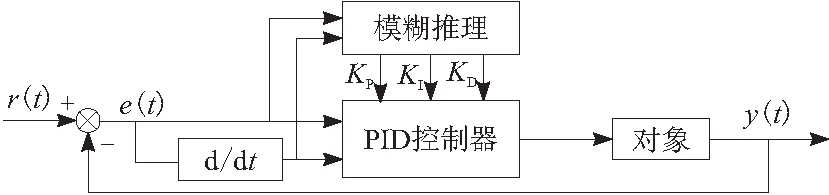
圖1 模糊自適應PID控制器結構
1.2 pH模糊自適應PID控制器的設計
1.2.1 控制器輸入和輸出變量的確定
控制器的輸入變量為采樣pH值和設定pH值的偏差e以及偏差變化率ec,輸出變量為PID控制3個參數的增量ΔKP,ΔKI,ΔKD。每個采樣時刻離散的偏差和偏差變化為:
E(n)=pHset-pH(n)
(1)
EC(n)=E(n)-E(n-1)
(2)
1.2.2 控制器輸入輸出模糊語言描述
E,EC以及KP的論域定義均為{-3,-2,-1,0,1,2,3}。KI和KD的論域定義均為{-0.06,-0.04,-0.02,0,0.02,0.04,0.06}。它們的模糊子集均為{NB,NM,NS,ZE,PS,PM,PB},分別表示負大、負中、負小、零、正小、正中和正大。
根據發酵過程的pH控制要求,設計偏差e實際的變化范圍為[-7,7],因此,偏差變化率ec的變化范圍也為[-7,7]。輸出量ΔKP的實際變化范圍為[-0.005,0.005],ΔKI和ΔKD的實際變化范圍為[-0.001,0.001]。設e和ec的量化因子分別為Ke和Kec,而ΔKP,ΔKI,ΔKD的比例因子分別為Ku1,Ku2,Ku3,根據映射關系,可得Ke=Kec=3/7,Ku1=0.005/3,Ku2=Ku3=0.001/0.06。
1.2.3 控制器各模糊變量賦值表的確定
由于工程中往往采用形式更簡單,計算更簡便的隸屬度函數,所以,選擇三角隸屬度函數對模糊變量賦值,也就是確定論域內元素對模糊語言變量的隸屬度[5]。
1.2.4 控制器模糊控制規則的設計
在設置模糊控制規則的時候,需要重點考慮2個問題[6],pH值變化的基本特征以及PID各個控制參數的不同影響。
a. 當表示實際偏差的絕對差|e|很大的時候,應該采用一個較大的KP。這時pH值得變化比較緩慢。為了防止積分飽和導致大的超調,通常取較小的KI。微分系數KD的大小對系統的響應速度有重大的影響。在設置KD時,應該考慮實際偏差e和實際偏差率ec的運算符號。當e×ec>0時,實際的pH值偏離給定值,這時PID控制器應當有一個較大的KD值;當e×ec<0時,實際的pH值接近于給定值,PID控制器應該有一個更小的KD值。
b.當|e|的值適中的時候,為了防止系統超調,通常取較小的KP和KI。在設置微分系數KD時,應該考慮e和ec的運算符號。當e×ec>0時,PID控制器應該有一個較大的KD值;當e×ec<0時,為了獲得適當的響應速度和較小的超調量,應取適中的KD值。
c.當|e|很小接近于零且|ec|也很小的時候,為了獲得更好的調節速度,PID控制器需要有一個較大的KP值和較大的KI值。考慮系統的抗干擾性能,應當取較大的KD值。如果|ec|的值很大,PID控制器應當取一個較小的KD,適中的KI和KP。
生物發酵過程中,pH值模糊自適應PID控制規則的制定,主要是通過上述PID自整定參數原則,同時也是操作人員和專家的經驗知識總結,并結合工程設計的技術知識和實際的操作經驗。
模糊推理是指根據模糊輸入和模糊規則,按照確定好的推理方法進行推理,得到模糊量[7]。所設計的pH值模糊自適應PID控制器的模糊推理方法選用MAX-MIN法,即Mamdani法,因為其規則的行事符合人們思維和語言表達的習慣,方便表達人類的知識,所以比較簡便和常用。
1.2.5 控制器輸出變量解模糊化和PID參數自整定

(3)
通過重心法分別計算出發酵過程中pH值模糊自適應PID控制器的精確輸出值ΔKP,ΔKI,ΔKD,也就是PID參數KP,KI,KD的增量值。通過下式計算出實時的PID參數KP,KI,KD,完成PID參數的在線自整定,最后實現對生物發酵過程中pH值的實時控制。
(4)
KP0,KI0,KD0為控制系統初始設定的PID參數。
2 控制系統的仿真設計
在Matlab的命令窗口中運行fuzzy函數,進入模糊推理系統FIS編輯器[10]。然后在規則編輯器Rule Editor窗口中輸入模糊控制規則[11],設定模糊決策為Mamdani型推理算法,解模糊為重心法(centroid)。設定控制器的結構為2輸入、3輸出,并確定變量名,分別編輯輸入輸出的論域區間和隸屬度函數曲線。最后,保存一個模糊系統時,模糊邏輯工具箱自動建立一個FIS文件,命名為fpid.fis。為了使FIS文件同Simulink連接,給下一步的系統仿真做好準備,必須建立一個命名為fpid.m的文件,在文件中編輯語句fpid=readfis(‘fpid.fis’)。在利用Simulink使用模糊邏輯工具箱進行仿真前,必須在Matlab命令窗口執行fpid,把FIS轉化為Matlab結構,接下來就可以在Simulink中建立控制器的系統仿真框圖了。常規PID和模糊自適應PID系統仿真的階躍響應曲線分別如圖2,圖3所示。
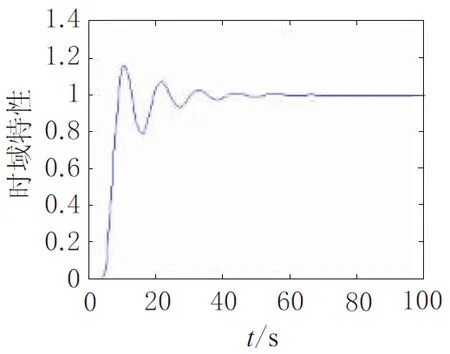
圖2 常規PID階躍響應曲線
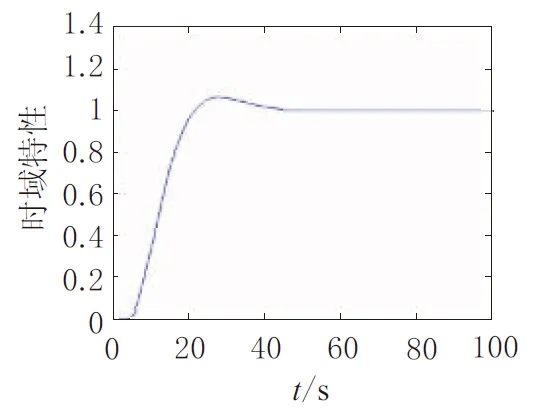
圖3 模糊自適應PID階躍響應曲線
對仿真結果進行分析可知,模糊自適應PID控制克服了常規PID控制的缺點,實現了系統調節時間短、超調量小和穩態誤差小的性能指標,可以很好地完成生物發酵過程中pH的控制。
3 自適應遺傳算法對模糊PID初始參數的優化
PID初始參數整定是控制系統設計的核心內容。采用不同的PID初始參數,控制系統的效果大不相同。PID控制器的性能很大程度上決定了控制系統的閉環特性,然而對于控制器初始參數的調節和優化,決定著PID控制系統可以達到的最終控制性能,成為PID控制系統研究中很重要的領域。
遺傳算法是模仿生物進化思想的一種自適應啟發式全局搜索算法[12],一般應用步驟如下:
a.確定問題的解空間,將其表示成編碼串,即染色體。
b.建立優化模型,確定目標函數以及適應度函數。
c.確定表示解的染色體編碼和解碼方法。將染色體譯碼成尋優函數,計算出對應目標函數并變換成適應值。
d.確定選擇、交叉和變異等遺傳操作的具體實現方法。
e.確定遺傳算法的運行參數,如種群大小、交叉率和變異率等。
f.返回步驟c,直到滿足條件為止。
在Matlab中搭建遺傳算法工具箱,通過遺傳迭代尋優,計算出滿足約束條件的PID初始參數,然后在Simulink下進行仿真,可得系統階躍響應曲線如圖4所示。
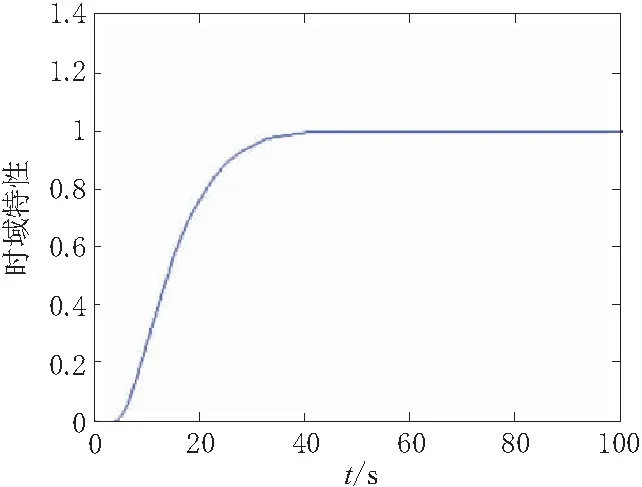
圖4 遺傳算法優化后的模糊自適應PID響應曲線
相比于通過Z-N法整定PID初始參數的模糊自適應PID控制而言,通過遺傳算法優化PID初始參數的控制策略,在調節時間和超調量方面可以得到更優的控制效果。不同控制系統性能比較如表1所示。
表1 不同控制系統性能比較
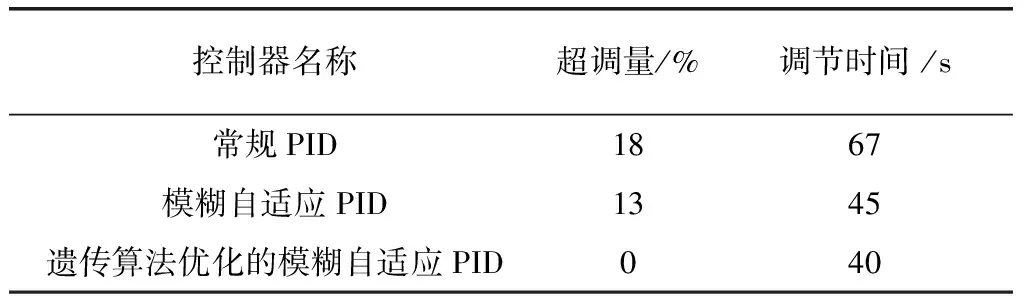
控制器名稱超調量/%調節時間/s常規PID1867模糊自適應PID1345遺傳算法優化的模糊自適應PID040
4 實驗與結論
為了驗證遺傳算法優化的模糊自適應PID控制系統,在生物發酵過程中對于pH值控制存在優勢,設計了發酵實驗。發酵對象是酵母菌,引導物是蛋氨酸,產物是腺苷蛋氨酸。做了3組對比性試驗,在同樣的5 L的發酵罐中,保證整個發酵過程中乙醇濃度值以及對應的補糖速率采用同一標準,分別采用上述3種控制系統對pH值進行控制,最后得到樣品產量及其轉化率,如表2所示。
表2 不同控制系統的實驗數據
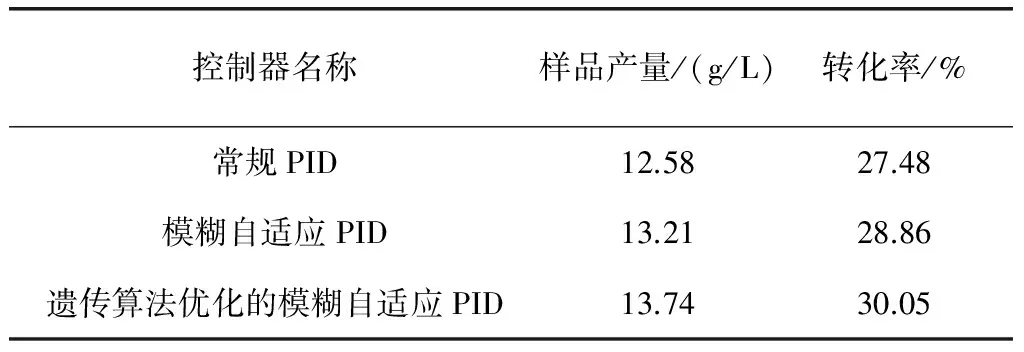
控制器名稱樣品產量/(g/L)轉化率/%常規PID12.5827.48模糊自適應PID13.2128.86遺傳算法優化的模糊自適應PID13.7430.05
根據上述實驗數據,可以得出通過遺傳算法優化的模糊自適應PID控制生物發酵過程中的pH值,對于提高樣品產量和轉化率具有優勢。相對于傳統的控制策略,遺傳算法優化的模糊自適應PID控制,在生物發酵過程的pH控制中效果明顯提升。
5 結束語
以發酵過程的pH值作為控制對象,采用遺傳算法優化的模糊自適應PID控制方案來進行控制,解決了常規控制系統的非線性和大滯后問題,具有良好的動態響應特性和穩定性,控制效果得到進一步改善。雖然在采用遺傳算法優化PID初始參數方面取得了滿意的控制效果,但是還有很多研究工作要做,如對隸屬度函數和模糊控制規則的優化,研究多目標尋優的相互影響,設計出更完善的控制策略等。
[1] 劉建峰.發酵過程參數檢測及系統控制[D].南昌:南昌大學, 2012.
[2] 劉仲匯,楊 艷,史建國,等.pH溫度智能控制系統在葡萄糖酸鈉發酵中的應用[J].糧食與食品工業,2008,15(6):24-26.
[3] 楊照華, 楊 智,王慧中.兩種新型pH值的控制方法研究[J].甘肅工業大學學報, 2001, 27(3): 51-54.
[4] 胡廣平.模糊自適應PID控制鎳點解pH控制中的應用研究[D].蘭州:蘭州理工大學, 2006.
[5] 王季方, 盧正鼎.模糊控制中隸屬度函數的確定方法[J].河南科學, 2000,18(4): 348-351.
[6] Xie S H. Research about fuzzy-PID control method of pH value in chemical industry process[C]∥ 2010 International Conference on Electrical and Control Engineering,2010:1554-1557.
[7] 鐘 飛, 鐘毓寧.Mamdani與Sugeno型模糊推理的應用研究[J].湖北工業大學學報,2005,20(2):28-30.
[8] 羅 斌.重載平板車轉向系統模糊PID控制研究[D].長沙:中南大學,2007.
[9] 李霄燕,呂利娟,袁金環.自調整模糊PID及其在pH值控制中的仿真研究[J].氣象水文海洋儀器,2008,(4):22-24.
[10] 劉 冰,李 文,丁鳴艷.基于Matlab的模糊PID控制系統的設計及其仿真[J].儀器儀表用戶,2006,13(2):87-89.
[11] 費春國.模糊自調整控制器的研究與應用[D].天津:天津科技大學,2003.
[12] 溫 良,楊明國,賀小峰,等.基于自適應遺傳算法優化的模糊 PID 控制在實驗軋機中的應用研究[J].機床與液壓,2011,39(17):27-29.
Fuzzy System of Genetic Algorithm Optimization and Its Application on pHControl of Fermentation
CHENJunxin
(College of Mechanical and Engineering,Beijing University of Chemical Technology,Beijing 100029,China )
For there is a change of pH value of the fermentation in serious nonlinear, time delay and time-varying, fuzzy adaptive PID control solution can online tune PID control parameters in real-time, pH control can be achieved by actuator controlling the amount of alkali liquor added to the fermentation tank, and genetic algorithm can be used to optimize the initial parameters of PID. The simulation results show that the fuzzy adaptive PID control of genetic algorithm optimization has advantages of rising fast, high precision adjustment, good stability, short transition time, small overshoot. Therefore, it is effective, feasible solution. Finally, we designed the software and hardware and did verification experiment.
fermentation;fuzzy adaptive;parameters of PID;genetic algorithm
2014-02-28
國家重點基礎研究發展計劃(973計劃)資助項目(2013CB733603)
TP273
A
1001-2257(2014)07-0007-04
陳俊昕(1988-),男,四川達州人,碩士研究生,研究方向為光機電一體化及生命科學儀器。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
