空間目標(biāo)檢測(cè)與實(shí)現(xiàn)方法研究
2014-09-08 11:57:06岳玫君王啟智
雷達(dá)與對(duì)抗 2014年3期
岳玫君,王啟智
(1.解放軍電子工程學(xué)院,合肥 230037;2.中國(guó)電子科技集團(tuán)公司第三十八研究所,合肥 230088)
空間目標(biāo)檢測(cè)與實(shí)現(xiàn)方法研究
岳玫君1,王啟智2
(1.解放軍電子工程學(xué)院,合肥 230037;2.中國(guó)電子科技集團(tuán)公司第三十八研究所,合肥 230088)
空間目標(biāo)由于其高速高機(jī)動(dòng)等特點(diǎn)在觀察時(shí)間內(nèi)通常跨越多個(gè)距離單元,使得為了目標(biāo)檢測(cè)進(jìn)行能量相參積累變得很困難。通過對(duì)大時(shí)寬高速運(yùn)動(dòng)目標(biāo)雷達(dá)回波信號(hào)的建模,分析了拉伸效應(yīng)、脈沖間距離遷徙等因素對(duì)積累的影響。提出了一種基于欠采樣下Keystone變換的高速目標(biāo)檢測(cè)方法。該方法能有效補(bǔ)償距離走動(dòng),去除多普勒模糊,提高信噪比,改善雷達(dá)的檢測(cè)性能。通過仿真和實(shí)際數(shù)據(jù)分析,驗(yàn)證了該算法的有效性,同時(shí)結(jié)合硬件平臺(tái)給出了工程實(shí)現(xiàn)方法。
空間目標(biāo);Keystone變換;距離遷徙;工程實(shí)現(xiàn)
0 引 言
空間目標(biāo)具有探測(cè)距離遠(yuǎn)、目標(biāo)RCS小、高速高機(jī)動(dòng)性等特點(diǎn)[1],對(duì)其檢測(cè)和跟蹤是當(dāng)今雷達(dá)技術(shù)領(lǐng)域的熱點(diǎn)與難點(diǎn)問題之一。對(duì)于此類信號(hào)的檢測(cè)通過增大天線孔徑、增強(qiáng)發(fā)射功率能達(dá)到很好的效果,但這些通常會(huì)大大增加系統(tǒng)成本,不符合綠色設(shè)計(jì)理念。通常可以延長(zhǎng)積累時(shí)間以增加實(shí)際應(yīng)用的能量,達(dá)到降低系統(tǒng)信噪比的要求。對(duì)于高速的空間目標(biāo)進(jìn)行長(zhǎng)時(shí)積累,不可避免地會(huì)發(fā)生目標(biāo)包絡(luò)跨距離單元走動(dòng)問題[2-4]。這不僅造成目標(biāo)的距離和速度信息失真,更使得目標(biāo)能量分散而達(dá)不到檢測(cè)門限,造成雷達(dá)作用距離縮短。Keystone變換[5]是在距離向脈沖壓縮的頻域?qū)β龝r(shí)間軸進(jìn)行尺度變換,是回波距離校正的有效方法。
1 高速目標(biāo)回波分析
在窄帶情況下,由于分辨率的原因,目標(biāo)都被認(rèn)為是一個(gè)散射點(diǎn),同時(shí)由于在一定的時(shí)間和空間內(nèi)只是對(duì)某一個(gè)目標(biāo)感興趣,因此這里只對(duì)高速運(yùn)動(dòng)的單點(diǎn)目標(biāo)回波進(jìn)行分析。
假設(shè)雷達(dá)發(fā)射的基帶信號(hào)為線性調(diào)頻脈沖信號(hào):
式中,T為信號(hào)時(shí)寬,B為帶寬。
雷達(dá)在觀測(cè)衛(wèi)星、導(dǎo)彈之類的空間高速目標(biāo)時(shí),一般發(fā)射時(shí)寬較寬、目標(biāo)速度較快。因此,回波信號(hào)存在拉伸效應(yīng),不能只看作發(fā)射信號(hào)的遲延,僅考慮多普勒影響,其時(shí)間尺度因子也必須考慮。但是,在|v|/c?1(v是目標(biāo)的徑向速度,c是光速)的條件下,回波信號(hào)的基帶信號(hào)可以寫為[6]
式中,n為發(fā)射的脈沖個(gè)數(shù),fc為載波頻率,A0是散射點(diǎn)回波的幅度,τn為第n個(gè)脈沖的延遲時(shí)間,R0為0時(shí)刻的距離,Tr為脈沖重復(fù)時(shí)間。
為了減小運(yùn)算量,一般利用快速傅里葉變換(FFT)替代時(shí)域卷積來進(jìn)行脈沖壓縮,脈壓后的信號(hào)頻譜為

對(duì)應(yīng)的時(shí)域信號(hào)為
由上式可以看出,脈沖壓縮時(shí)域信號(hào)的包絡(luò)是一個(gè)sinc函數(shù)。由sinc函數(shù)的性質(zhì)知,信號(hào)峰值的位置位于τn-Tfd/B。由于目標(biāo)的高速運(yùn)動(dòng),目標(biāo)的包絡(luò)會(huì)發(fā)生與多普勒頻率成正比的偏移,其偏移的距離可以表示為cTfd/(2B),若忽略相參積累時(shí)間里fd的變化,則這個(gè)偏移量對(duì)于每個(gè)脈沖回波相同,可以不予考慮。但是,脈壓以后目標(biāo)的包絡(luò)τn分量隨著每個(gè)脈沖數(shù)變化。這對(duì)于信號(hào)的能量積累不利,從而不利于對(duì)微弱目標(biāo)的檢測(cè)。后續(xù)處理若直接用FFT變換進(jìn)行多普勒濾波,信號(hào)能量積累會(huì)有損失,不利于信噪比的提高;而且由于距離走動(dòng)的影響,目標(biāo)的主瓣明顯展寬,其距離分辨力和多普勒分辨力也會(huì)有所降低。
2 欠采樣下Keystone變換及計(jì)算仿真
2.1 欠采樣下Keystone變換
所謂Keystone變換就是進(jìn)行一種變量代換,將f-τn平面的矩形支撐域在f-τm平面變成倒梯形。它是對(duì)τn軸的伸縮變換,伸縮幅度與頻率有關(guān)。
當(dāng)fd?fc時(shí),經(jīng)過Keystone變換后,可以寫為[7]

由上式可以看出,經(jīng)Keystone變換后脈沖壓縮信號(hào)峰值位置只與初始時(shí)刻有關(guān),存在一個(gè)固定的速度距離耦合偏差,與雷達(dá)各脈沖周期回波無關(guān),脈沖間的距離走動(dòng)得以消除。
當(dāng)目標(biāo)的速度較快或者雷達(dá)的脈沖重復(fù)頻率較低時(shí),常常會(huì)導(dǎo)致欠采樣,這時(shí)多普勒頻率是模糊的,可表示為
fd=fd0+nkPRF
式中,fd0是折疊以后的多普勒頻率,nk是折疊因子,PRF是脈沖重復(fù)頻率。
如果出現(xiàn)多普勒頻率模糊,就需要對(duì)Y(f,m)進(jìn)行相位補(bǔ)償:
在處理時(shí),模糊次數(shù)將是算法的一個(gè)限制條件。但是,通常雷達(dá)模糊數(shù)不會(huì)特別嚴(yán)重,或者通過對(duì)目標(biāo)特性的解析或搜索雷達(dá)的引導(dǎo),這一限制條件相對(duì)寬松。
2.2 計(jì)算機(jī)仿真
用大時(shí)寬LFM脈沖串信號(hào)來驗(yàn)證Keystone變換 在高速目標(biāo)相參積累中校正包絡(luò)徙動(dòng)的作用,取雷達(dá)參數(shù)為:載頻fc=3.2 GHz,目標(biāo)速度v=5 km/s,信號(hào)帶寬B=10 MHz, 信號(hào)時(shí)寬T=100 μs,采樣率fs=12 MHz,脈沖個(gè)數(shù)N=128,脈沖重復(fù)頻率PRF=2 kHz,假設(shè)回波信噪比為-10 dB。圖1為仿真結(jié)果。可見,經(jīng)過脈沖壓縮后,由于目標(biāo)的運(yùn)動(dòng),在一個(gè)相參處理間隔內(nèi),目標(biāo)跨越了幾十個(gè)距離單元,如圖1(a)所示。若如圖1(c)直接方位FFT相參積累,目標(biāo)能量將被分散至多個(gè)距離和多普勒單元,不利于目標(biāo)的檢測(cè)及測(cè)距、測(cè)速。對(duì)回波經(jīng)Keystone變換后,目標(biāo)回波包絡(luò)被拉回至同一距離,如圖1(b),然后再進(jìn)行濾波處理。比較圖1(d)和圖1(c),不難發(fā)現(xiàn),經(jīng)過本文的方法處理后,檢測(cè)信噪比得到顯著提升。
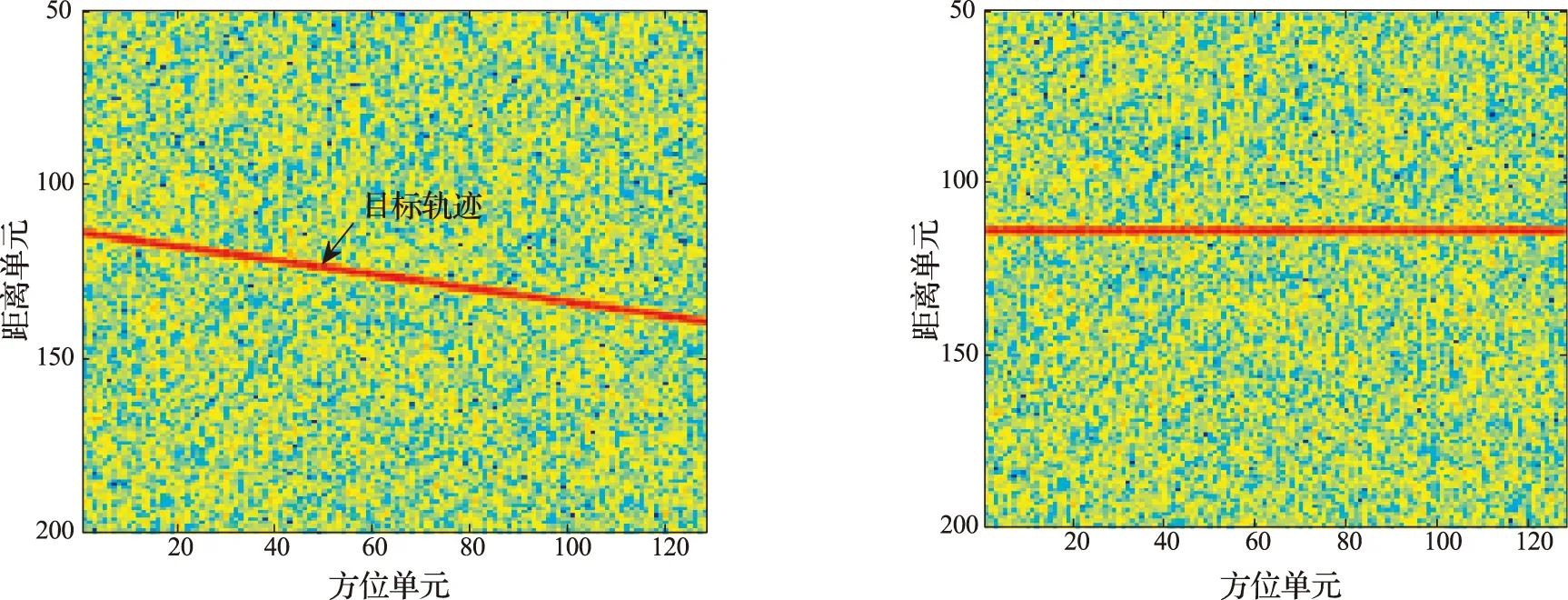
(a)脈沖壓縮 (b)Keystone變換包絡(luò)校平
(c)直接方位FFT的檢測(cè)結(jié)果 (d)欠采樣Keystone變換檢測(cè)結(jié)果
圖1 計(jì)算機(jī)仿真結(jié)果
3 實(shí)測(cè)數(shù)據(jù)處理及工程實(shí)現(xiàn)
3.1 實(shí)測(cè)數(shù)據(jù)處理
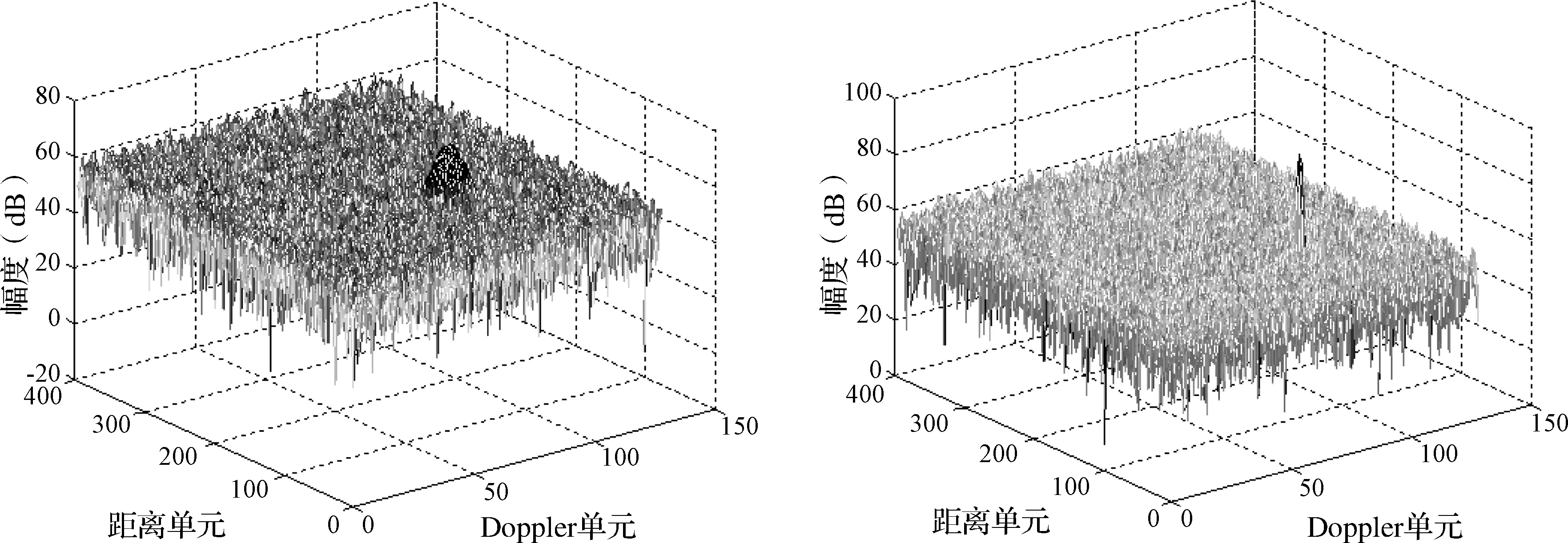
為了進(jìn)一步驗(yàn)證算法,利用實(shí)測(cè)數(shù)據(jù)也進(jìn)行了處理。針對(duì)某S波段雷達(dá)回波,信號(hào)帶寬5 MHz,回波脈沖數(shù)為64,處理結(jié)果如圖2所示。可見,Keystone變化前后信噪比有3.7 dB改善,目標(biāo)的測(cè)距、測(cè)速精度均有所提高,表明了方法的有效性。
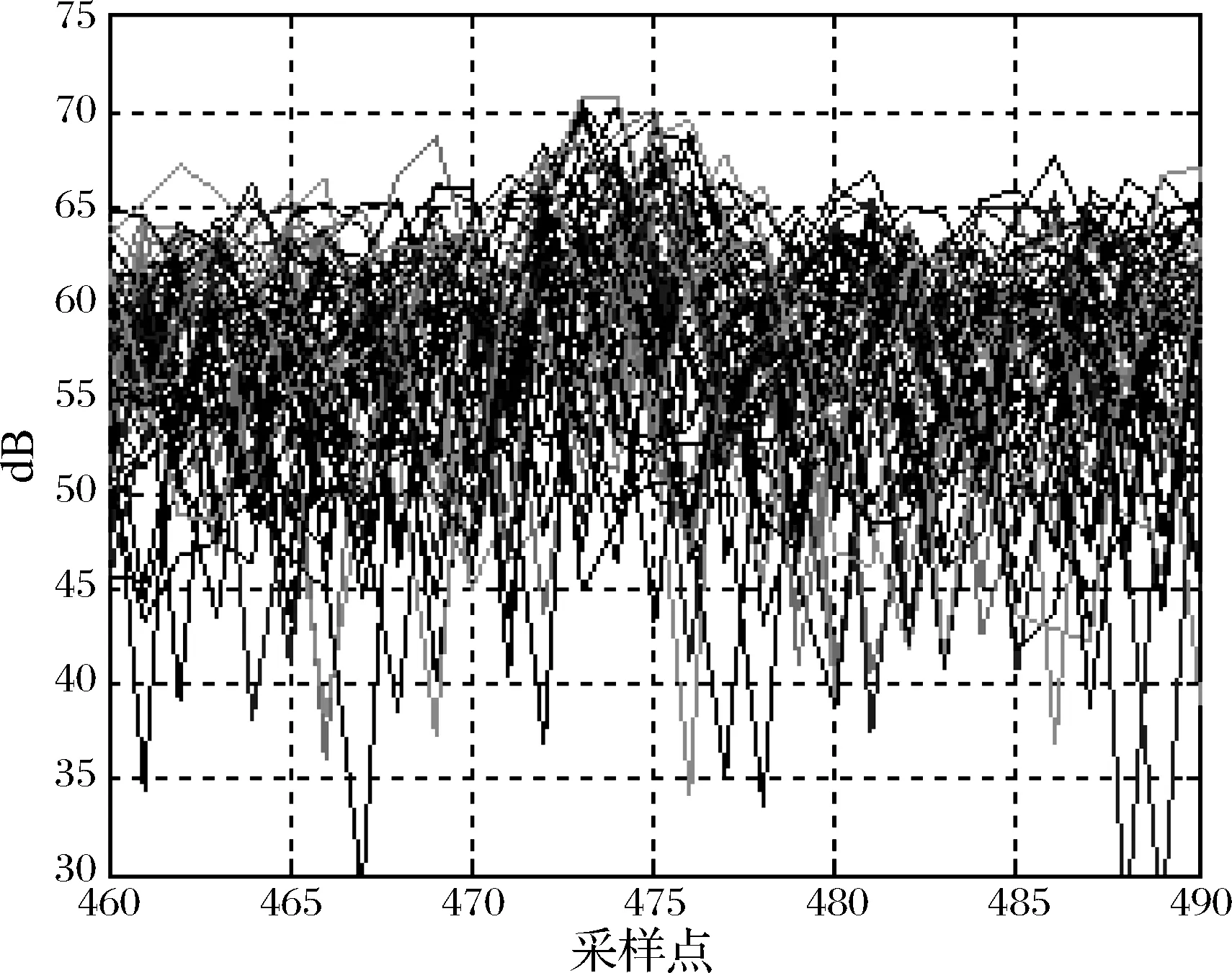
(1)脈沖壓縮
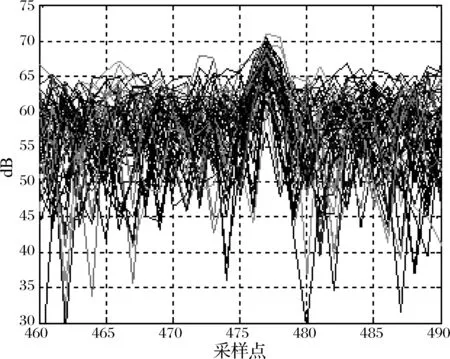
(2)Keystone變換包絡(luò)校平
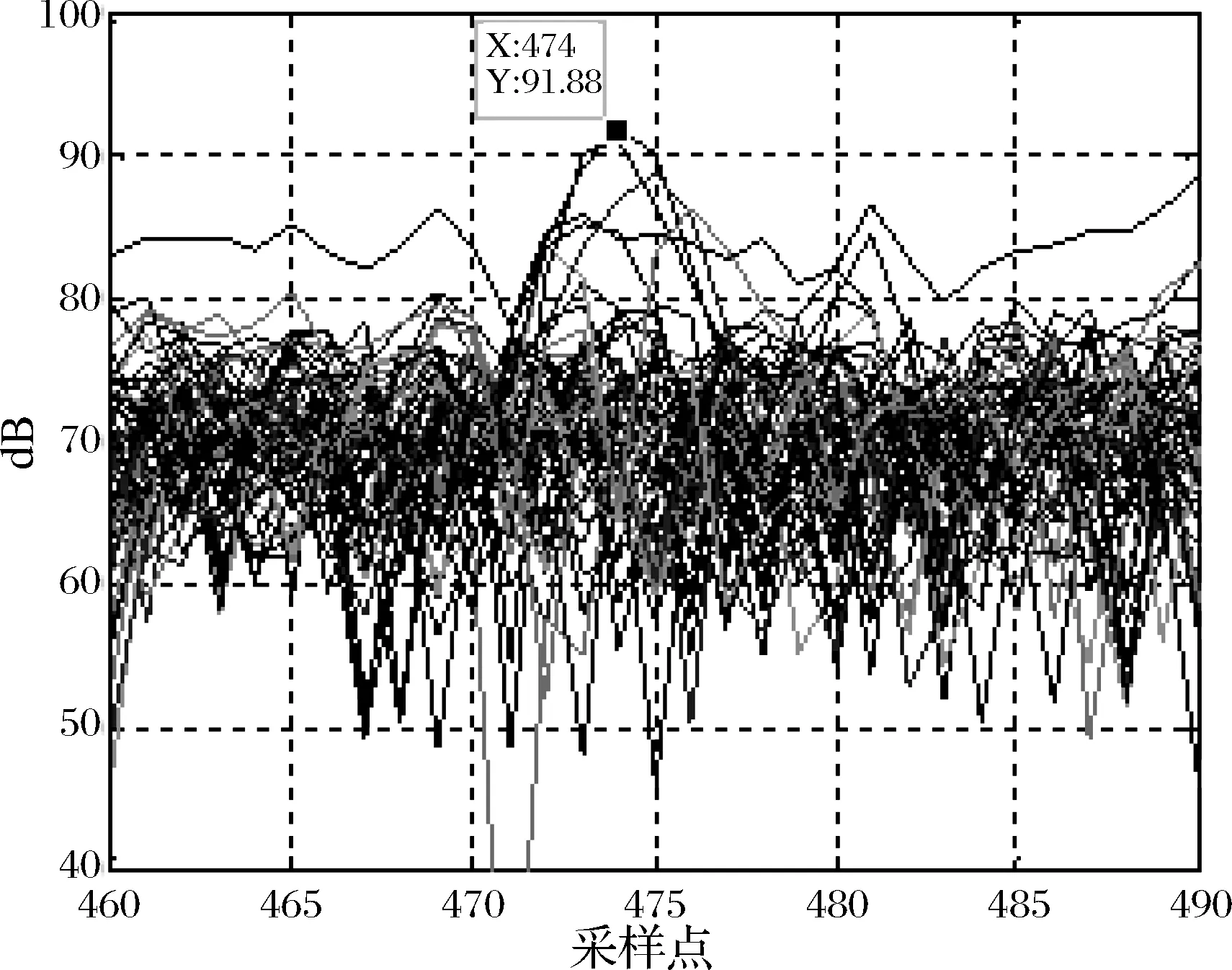
(3)直接方位FFT的檢測(cè)結(jié)果
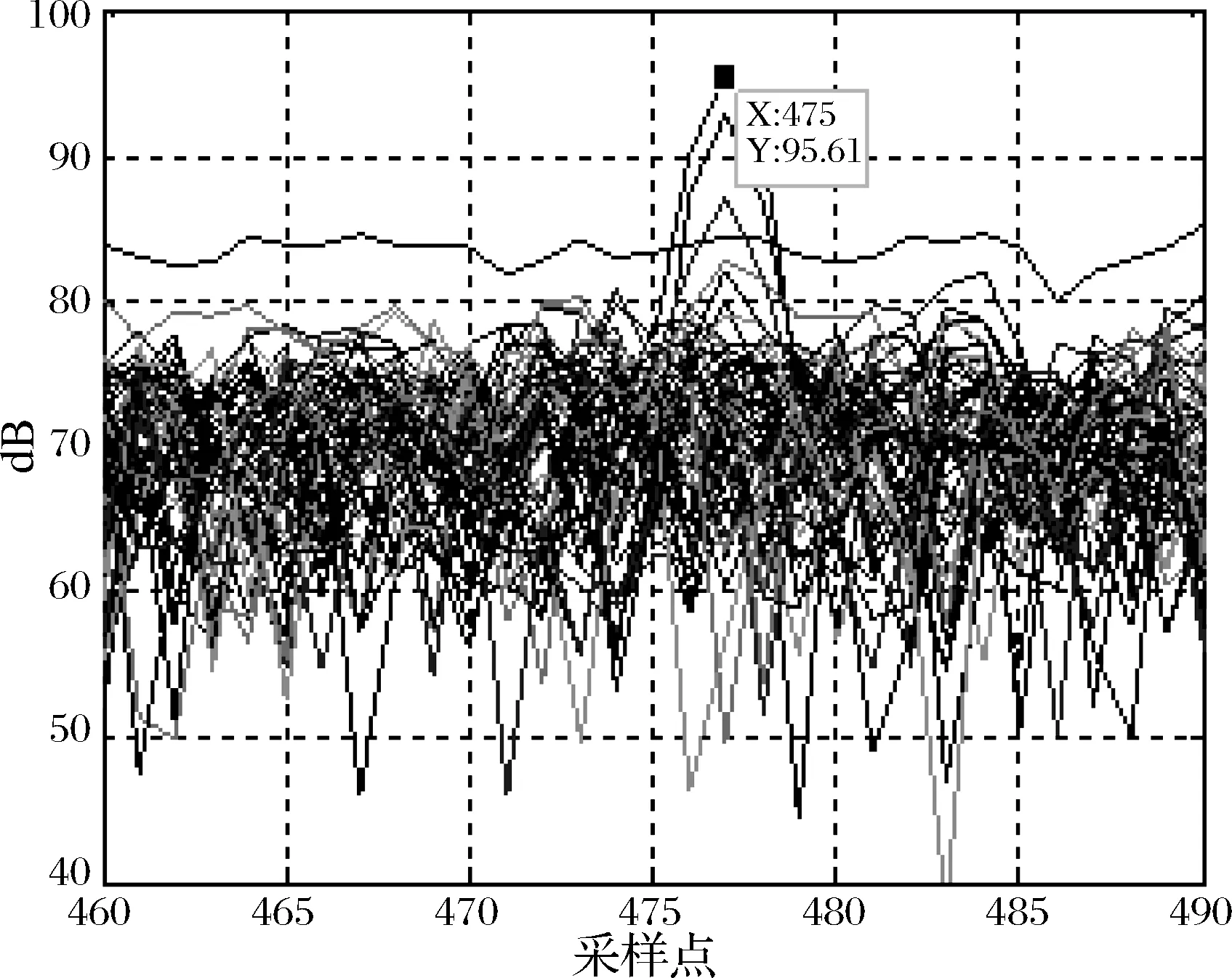
(4)欠采樣Keystone變換檢測(cè)結(jié)果
3.2 工程實(shí)現(xiàn)
ADSP-TS201是一款高性能的靜態(tài)超標(biāo)量處理器,主要結(jié)構(gòu)特點(diǎn)包括并行運(yùn)算、內(nèi)部存儲(chǔ)器、四指令執(zhí)行、可升級(jí)性及多核處理器。運(yùn)行在600 MHz時(shí),ADSP-TS201內(nèi)核的指令周期為1.67 ns,內(nèi)部存儲(chǔ)器大小為24 Mbit。ADSP-TS201靜態(tài)超標(biāo)量結(jié)構(gòu)使DSP每周期能夠執(zhí)行多達(dá)4條指令,執(zhí)行24個(gè)16位定點(diǎn)或者6個(gè)浮點(diǎn)運(yùn)算。
通用信號(hào)處理板卡是一款自主研發(fā)的通用信號(hào)處理硬件平臺(tái)。板卡以DSP(ADSP-TS201)為主處理器,F(xiàn)PGA提供時(shí)序、控制及數(shù)據(jù)輸入輸出接口,板卡上有8片TS201,并行工作峰值運(yùn)算能力高達(dá)8×3.6GFLOPS。板卡采用的是4片/簇的并行處理結(jié)構(gòu),每片TS201均通過一路鏈路口與FPGA相連,簇內(nèi)4片TS201彼此通過鏈路互連,單向數(shù)據(jù)率可達(dá)500Mb/s。處理結(jié)果通過鏈路口或總線輸出至FPGA,再通過CPCI總線傳送給主控計(jì)算機(jī)。板卡框圖如圖3~圖4所示。
Keystone變換的步驟如下:
步驟1 對(duì)回波信號(hào)x(t,n)進(jìn)行快時(shí)間頻率維度的FFT變換得到快時(shí)間頻域數(shù)據(jù)X(f,n);
步驟2 頻域脈壓匹配處理,即Spc(f,n)=X(f,n)P*(f),其中P*(f)為頻域脈壓匹配權(quán)系數(shù);
步驟3 對(duì)信號(hào)Spc(f,n)進(jìn)行脈沖維度的Keystone變換得到變換后信號(hào)Yk(f,m);
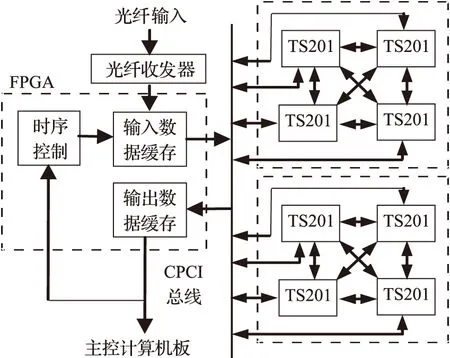
圖3 通用信號(hào)處理板卡框圖
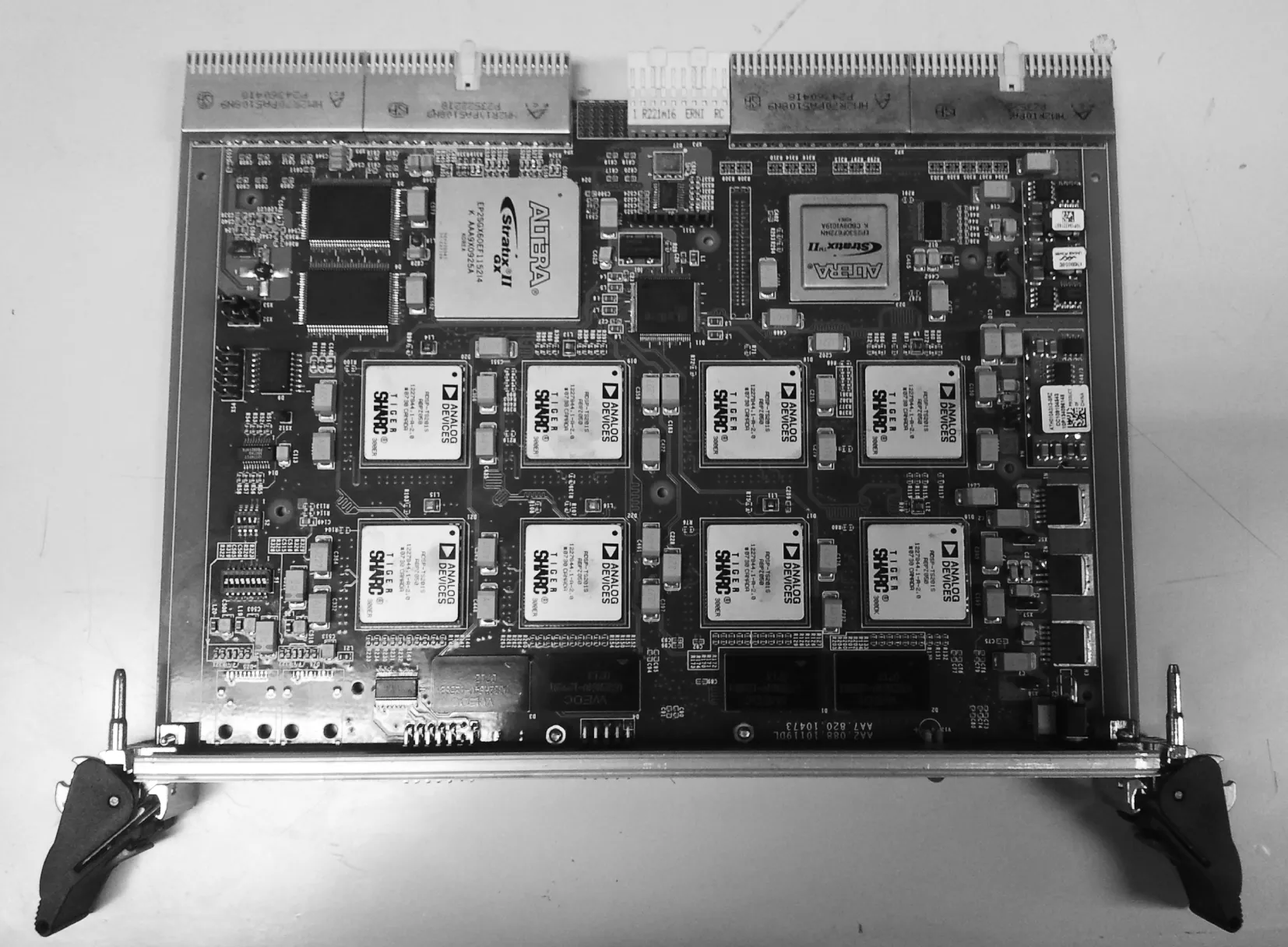
圖4 通用信號(hào)處理板卡實(shí)物圖
步驟4 對(duì)變換后信號(hào)進(jìn)行快時(shí)間頻域的IFFT處理,得到快時(shí)間時(shí)域信號(hào)yk(t,m);
步驟5 對(duì)IFFT處理后的數(shù)據(jù)進(jìn)行多普勒濾波。
在工程實(shí)際應(yīng)用中,若知道目標(biāo)大致位置,在步驟2后可采取脈壓時(shí)域開窗,然后再轉(zhuǎn)換至頻域做后續(xù)計(jì)算,以降低運(yùn)算量。
通常有3種方法實(shí)現(xiàn)Keystone變換:(1)DFT+FFT,(2)Chirp-z變換算法,(3)sinc內(nèi)插算法。3種算法性能相當(dāng),主要是運(yùn)算量的區(qū)別。假設(shè)快時(shí)間距離頻率域采樣點(diǎn)數(shù)為N,雷達(dá)在一個(gè)CPI內(nèi)發(fā)射的脈沖數(shù)為M。根據(jù)以上介紹,3種實(shí)現(xiàn)方法需要的復(fù)數(shù)運(yùn)算量如下[8]:
DFT+FFT算法:

Chirp-z算法:

Sinc內(nèi)插算法:
M2×N
當(dāng)N及M取值較大時(shí),DFT+FFT方法的運(yùn)算量很大,sinc內(nèi)插方法次之,Chirp-z方法最小。經(jīng)實(shí)際工程應(yīng)用,基于Keystone變換進(jìn)行空間目標(biāo)處理,信噪比改善效果明顯,計(jì)算量可接受,具有很強(qiáng)的工程運(yùn)用價(jià)值。在某工程運(yùn)用中,跟蹤波門3 km,積累脈沖數(shù)為60,單板可實(shí)現(xiàn)同時(shí)對(duì)8個(gè)目標(biāo)的連續(xù)跟蹤,跟蹤數(shù)據(jù)率可達(dá)10 Hz。
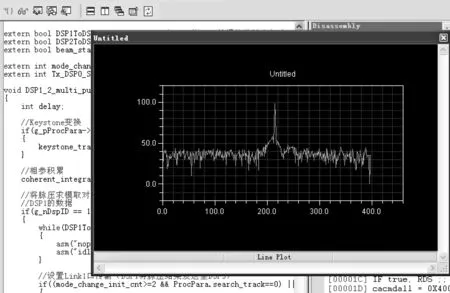
圖5 實(shí)際工程處理效果圖
4 結(jié)束語
本文研究了高速空間目標(biāo)相參積累過程中出現(xiàn)跨距離和跨多普勒頻道問題,給出了目標(biāo)回波模型,分析了拉伸效應(yīng)、脈沖間距離遷徙等因素對(duì)積累的影響;采用基于欠采樣下Keystone變換的高速目標(biāo)檢測(cè)方法,有效補(bǔ)償距離走動(dòng),去除多普勒模糊,提高信噪比,改善雷達(dá)的檢測(cè)性能。通過仿真和實(shí)際數(shù)據(jù)分析,驗(yàn)證了該算法的有效性,同時(shí)結(jié)合硬件平臺(tái),給出了工程實(shí)現(xiàn)方法。
[1] 張?jiān)螺x,朱玉鵬,游鵬,黎湘.高速動(dòng)態(tài)空間目標(biāo)寬帶回波仿真方法研究[J].系統(tǒng)仿真學(xué),2009(5):2721-2729.
[2] 保錚,邢孟道,王彤.雷達(dá)成像技術(shù)[M].北京:電子工業(yè)出版社,2005.
[3] Liu Yimin, Meng Huadong, Zhang Hao, et al. Motion Compensation of Moving Targets for High Range Resolution Stepped-Frequency Radar [ J ]. Sensor, 2008 (5) :3429-3437.
[4] Chen J J, Chen J, Wang S L. Detection of ultra-high speed moving target based on matched Fourier transform[C]//Proceedings of the CIE International Conference on Radar, 2006: 1-4.
[5] Zhang S S, Zeng T, Long T, et al. Dim Target Detection Based on Keystone Transform [C]//Proc. of IEEE Int. Radar Conf. Arlington, 2005: 889-894.
[6] 張順生,曾濤. 基于Keystone變換的微弱目標(biāo)檢測(cè)[J]. 電子學(xué)報(bào), 2005(9):1675-1678.
[7] 蘇軍海,李亞超,邢孟道. 窄帶雷達(dá)高速多目標(biāo)檢測(cè)研究[J]. 西安電子科技大學(xué)學(xué)報(bào)(自然科學(xué)版), 2009(6):1003-1009.
[8] 王娟,趙永波. Keystone變換實(shí)現(xiàn)方法研究[J]. 火控雷達(dá)技術(shù),2011(3):45-51.
Research on space target detection and realization
YUE Mei-jun1, WANG Qi-zhi2
(1. Electronic Engineering Institute of PLA, Hefei 230037;2. No.38 Research Institute of CETC, Hefei 230088)
Generally, high-speed and high maneuvering space targets go through several range cells in the observation period, which makes it difficult to perform coherent power accumulation for target detection. Through the modeling of radar echo signals of high-speed moving targets with large time-width, the influences of stretching effect, pulse-to-pulse range migration and other factors on accumulations are analyzed. A high-speed target detection method based on the Keystone transform in under-sampling is proposed, which can effectively compensate range migration, eliminate Doppler ambiguity, and improve the SNR and radar detection performance. It is verified that the algorithm is effective through the simulation and data analysis, and the engineering realization method is also given by combining hardware platform.
space target; Keystone transform; range migration; engineering realization
2014-07-20;
2014-08-01
岳玫君(1981-),女,講師,碩士,研究方向:目標(biāo)識(shí)別及電大尺寸目標(biāo)電磁特性;王啟智(1981-),男,高級(jí)工程師,研究方向:寬帶陣列信號(hào)及高速目標(biāo)檢測(cè)。
TN957.51
A
1009-0401(2014)03-0001-05
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34