鍛造操作機提升俯仰系統平降下滑問題的分析
2014-09-17 12:11:24冀宏陸海嬌何琪功趙曉峰
機床與液壓 2014年7期
關鍵詞:系統
冀宏,陸海嬌,何琪功,趙曉峰
(1.蘭州理工大學能源與動力工程學院,甘肅蘭州730050;2.蘭州蘭石重工有限公司,甘肅蘭州730050)
鍛造操作機是實現鍛造自動化的重要設備之一,它的主要任務是在鍛造過程中夾持和操縱鍛件,配合鍛造機進行鍛造工作,操作機具備行走、夾鉗開閉、旋轉、提升、平移和緩沖等多種功能,上述功能主要由液壓驅動方式來實現。提升俯仰系統是操作機的主要液壓系統之一[1]。
鍛造操作機的靈巧性是保證鍛件質量的重要指標,而大型操作機的大負載、大慣量和沖擊載荷對傳動系統的準確平穩定位帶來一定困難。本文作者針對鍛造操作機提升俯仰系統平升缸平降動作停止時下滑問題進行仿真與分析,最終找到原因,并提出改進方法。
1 提升俯仰液壓系統工作原理
提升俯仰系統的兩個前提升缸實現提升,稱為平升平降機構,兩個后提升缸實現俯仰,稱為傾斜機構。圖1為提升俯仰液壓系統原理圖,溢流閥2調定工作壓力,電液換向閥3、14在左位時,液控單向閥4、13正向導通,油缸上升;電液換向閥在右位時,液控單向閥反向導通,油缸下降;電液換向閥在中位時,液控單向閥鎖緊回路。單向調速閥5、12調節油缸下降速度,溢流閥6、11起安全閥作用,防止系統過載。若截止閥10打開,蓄能器9在油缸下降時充液,減輕液壓沖擊,油缸上升時排液,加快油缸上升速度。
該系統在實際工作中出現如下問題:換向閥14從右位換至中位時,平升缸8平降動作不能即時停止,而是繼續下滑一段距離 (約10 mm)后停止。
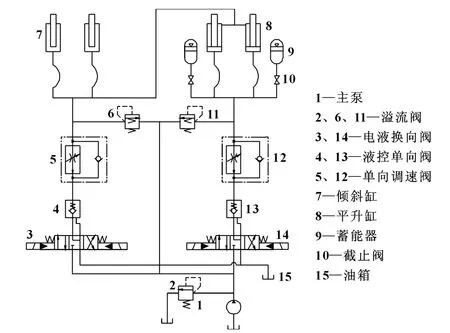
圖1 提升俯仰液壓系統原理圖
2 液壓系統仿真模型的建立
2.1 液控單向閥結構分析與建模
液壓回路中,液壓泵、溢流閥、換向閥、調速閥、液壓缸、油箱等元件可以從AMESim液壓元件庫中直接選取。而此系統選用的液控單向閥是Atos的AGRL-32,在該軟件中找不到直接模型,為了保證仿真的精度和可靠性,需要利用AMESim的HCD庫和Mechanical庫,根據元件的實際結構和工作原理自行搭建。液控單向閥的結構見圖2。
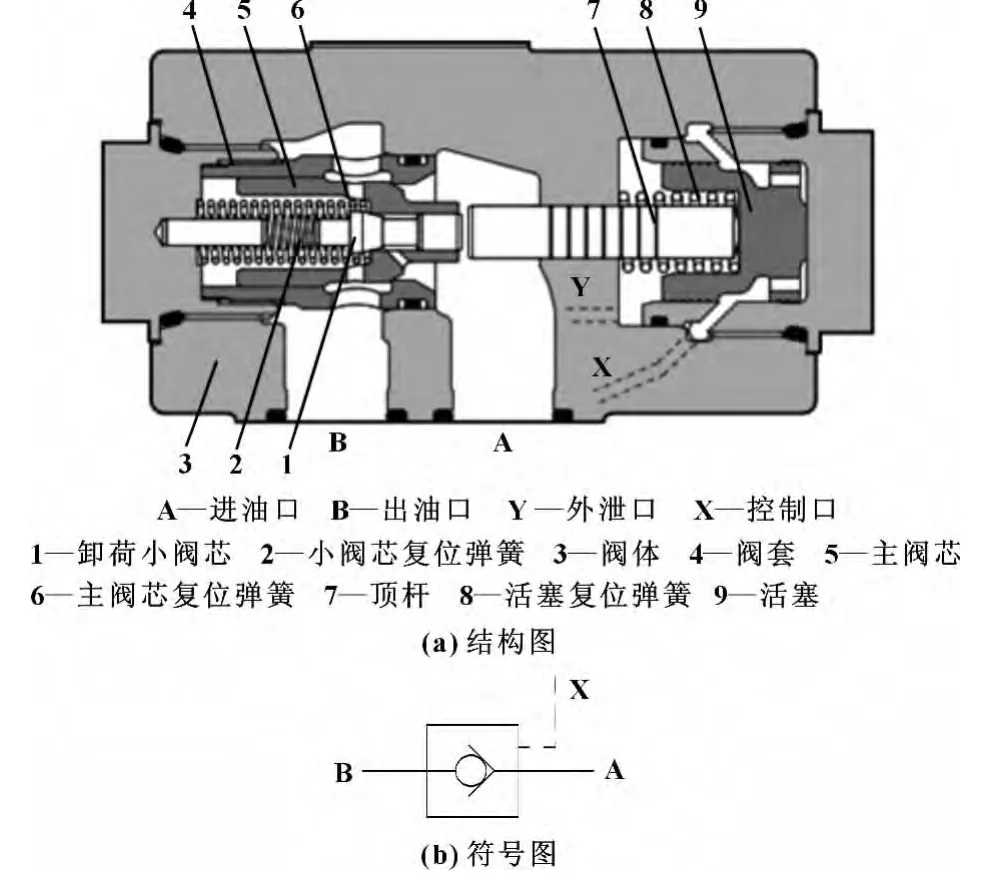
圖2 液控單向閥結構圖和圖形符號
該閥是帶有卸荷小閥芯的液控單向閥,且為內泄式 (即Y口與A口相通)。錐閥式主閥芯5上開有1個傾斜小孔和4個徑向小孔,傾斜小孔由錐閥式卸荷小閥芯1封閉。當控制口X沒有通入控制壓力油時,它具有普通單向閥的功能,即油液從A口流向B口,為液控單向閥的正向流動;當控制口X中通入控制壓力油時,控制壓力油將活塞9向左頂起,活塞通過頂桿7首先將卸荷小閥芯向左頂起,使主閥芯彈簧腔高壓油瞬時釋壓,然后,主閥芯被頂桿頂開,實現油液從B口到A口的反向流動。
依據液控單向閥的工作原理,建立液控單向閥AMESim仿真模型,如圖3所示。主閥芯2是小閥芯4的閥套,頂桿8與活塞9視為剛性連接。閥芯位移0~10 mm,活塞位移0~12 mm,位移向左為負。頂桿端面與小閥芯有2 mm間隙,與主閥芯有4 mm間隙。通過位移傳感器7將頂桿位移信號采集并輸入到力函數5、6中,編輯分段函數f(x)。F5(x)、F6(x)分別用于表達頂桿與小閥芯、主閥芯之間的間隙。力函數描述如下:

式中:x為頂桿位移,mm;px為控制壓力,MPa;Ax為活塞面積,mm2。
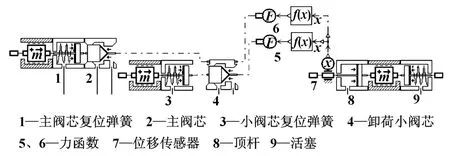
圖3 液控單向閥AMESim仿真模型
2.2 平降回路系統建模
系統建模時,進行了以下兩方面的簡化。
(1)該系統左右對稱,換向閥、液控單向閥、調速閥、溢流閥選型相同。傾斜缸運動正常,平升缸下滑,故只對平升平降回路建模。
(2)出現下滑現象時,蓄能器關閉,故在系統建模中可將蓄能器省略。
進入AMESim環境,在Sketch模式下利用已建成的液控單向閥模型,結合液壓、機械、控制庫中的元件構建如圖4所示平升平降回路仿真模型。
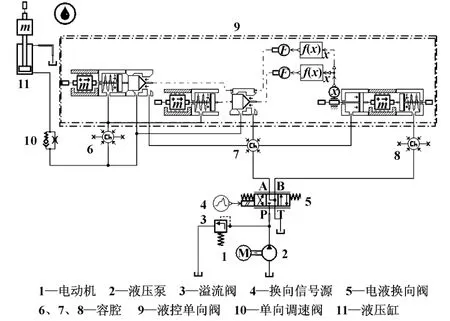
圖4 平升平降回路AMESim仿真模型
2.3 參數設定
根據實際工況,確定系統仿真模型參數,見表1。仿真模型中包含液控單向閥內部及與之相連的各液容模塊,液容參數由液控單向閥結構及連接管道尺寸計算確定,與液控單向閥連接的管道的動態效應予以忽略[2]。
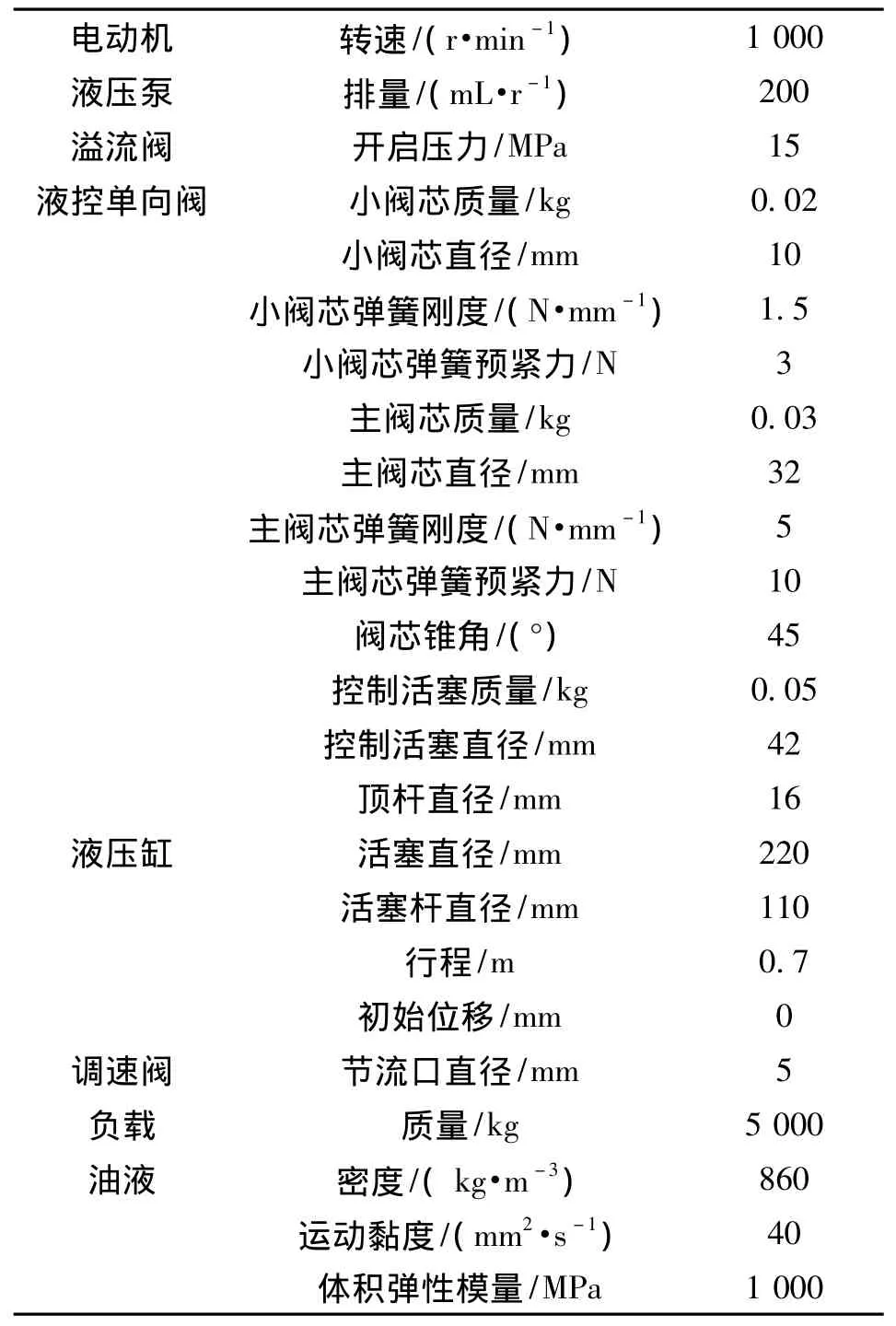
表1 模型中主要元件結構參數
選擇電液換向閥的換向信號作為系統動態過程的輸入信號,換向時間為0.08 s。為了方便分析仿真結果,特設定換向過程如圖5所示。仿真時間25 s,步長0.001 s,運行AMESim仿真模型,獲得各相關數據。
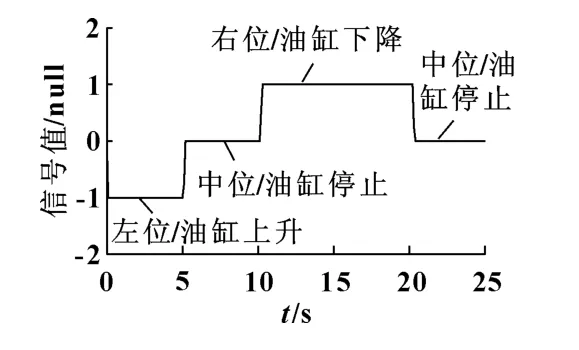
圖5 換向閥換向過程
3 仿真結果分析
3.1 活塞復位彈簧剛度對油缸位移的影響
改變活塞復位彈簧的預緊力對油缸下滑現象無明顯影響,故改變其彈簧剛度。圖6為活塞復位彈簧取不同剛度時油缸位移曲線,此時預緊力取10 N,彈簧剛度分別取2、4、10 N/mm。
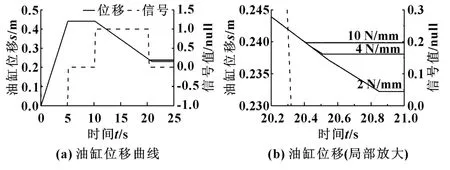
圖6 不同彈簧剛度時油缸位移曲線
由圖6(a)知,在20.32 s換向閥換至中位時,油缸位移沒有即時停止,存在明顯下滑現象,且彈簧剛度越小,油缸停止越滯后。由圖6(b)知,當彈簧剛度為2 N/mm時,油缸0.5 s下滑9 mm;當彈簧剛度為4 N/mm時,油缸0.2 s下滑4 mm;當彈簧剛度為10 N/mm時,油缸0.1 s下滑1 mm。
3.2 閥芯的瞬態運動特性
油缸下降、停止動作由液控單向閥反向開啟和關閉過程來實現。液控單向閥關閉時主要靠彈簧力復位[3]。當閥芯或活塞復位彈簧預緊力一定,彈簧剛度偏小時,則彈簧力偏小,閥芯或活塞復位加速度小,致使閥口不能即時關閉,使油缸繼續下滑,直到錐閥完全關閉油缸才能停止。圖7為活塞復位彈簧剛度為2 N/mm時閥芯和活塞位移曲線,以此說明閥芯的瞬態運動特性。
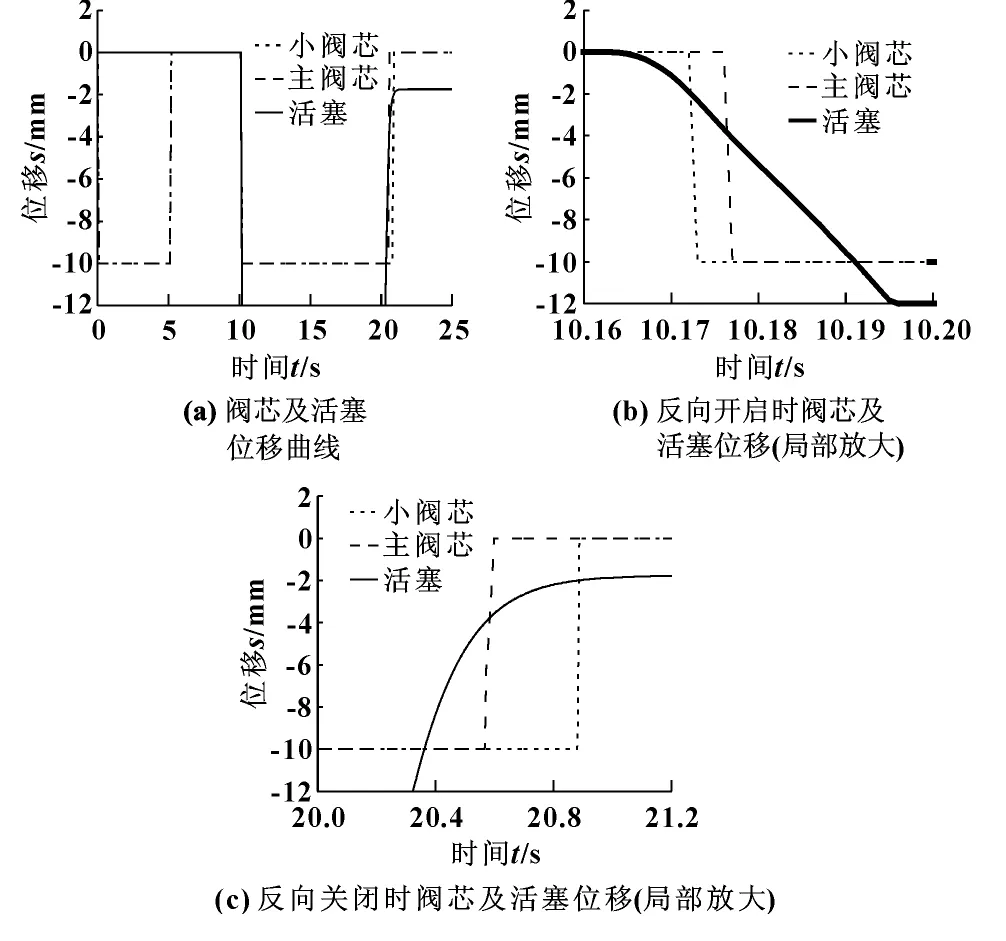
圖7 活塞彈簧剛度取2 N/mm時的閥芯瞬態運動特性曲線
(1)液控單向閥正向啟閉
當t=0.08 s時,單向閥開啟,圖7(a)中小閥芯和主閥芯位移曲線重合,說明兩閥芯位移同步,原因是主閥芯充當小閥芯的閥套,當主閥芯被高壓油頂起時帶動小閥芯后移。此時活塞位移為0。
當t=5.16 s時,單向閥關閉,圖7(a)中小閥芯與主閥芯位移曲線無滯后,均能立即復位,此時閥芯靠彈簧力復位,說明閥芯復位彈簧的彈簧剛度滿足要求,閥芯關閉即時可靠。此時活塞位移為0。
(2)液控單向閥反向啟閉
當t=10.16 s時,單向閥應開啟,圖7(b)中小閥芯10.172 s打開,主閥芯10.176 s打開。由于頂桿與兩閥芯之間存在間隙,當活塞左移時,頂桿位移在-2 mm時觸碰小閥芯,小閥芯先打開;位移在-4 mm時觸碰主閥芯,主閥芯后打開。
當t=20.32 s時,單向閥應關閉,圖7(c)中主閥芯20.533 s關閉,小閥芯20.844 s關閉,活塞復位緩慢,活塞位移在20.9 s后趨于停止,且沒有回到初始位置。由此可見,控制活塞復位彈簧剛度偏小,使其復位緩慢,且不能回到原位,給閥芯復位造成一定阻力,致使閥芯緩慢閉合。閥芯的滯留時間近似等于油缸下滑時間,正是由于閥芯不能即時關閉導致油缸下滑。
4 增大活塞復位彈簧剛度改進下滑現象
液控單向閥其他參數不變,增大活塞復位彈簧的剛度,即增大其復位力,取彈簧剛度為15 N/mm,油缸位移曲線見圖8。

圖8 活塞彈簧剛度取15 N/mm時油缸位移曲線
由圖8(a)知,油缸位移在20.32 s后即時停止,無明顯下滑現象。由圖8(b)知,20.37 s油缸停止,0.05 s下滑0.5 mm,由此可見,增大液控單向閥內活塞復位彈簧的剛度能有效改善油缸下滑現象。
圖9為活塞復位彈簧剛度為15 N/mm時閥芯瞬態運動特性。
(1)液控單向閥正向啟閉
當t=0.08 s和t=5.16 s時,圖9(a)中主閥芯和小閥芯的位移曲線重合,且位移無滯后,說明閥芯正向啟閉特性良好。此時活塞位移為0。
(2)液控單向閥反向啟閉
當t=10.16 s時,圖9(b)中小閥芯10.172 s打開,主閥芯10.178 s打開,與圖7(b)相比,此時主閥芯開啟時間慢了0.002 s,這是由于增大活塞的彈簧剛度對活塞左移增加了阻力。
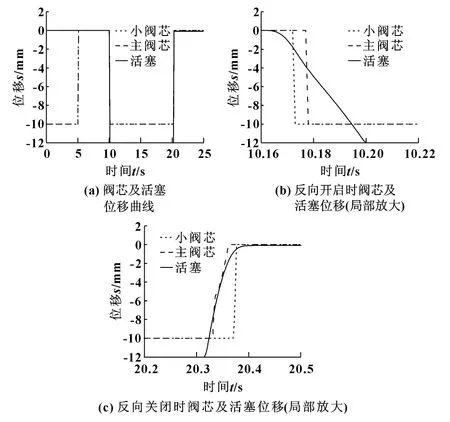
圖9 活塞彈簧剛度取15 N/mm時的閥芯瞬態運動特性曲線
當t=20.32 s時,圖9(c)中主閥芯20.35 s關閉,小閥芯20.37 s關閉了,活塞20.4 s復位。與圖7(c)相比,閥芯和活塞的復位時間大力縮短。主閥芯的位移曲線呈兩段式變化,第一段位移斜率較大,是由于受到兩個閥芯復位彈簧的并聯作用,速度較快;第二段位移斜率變小,此時主閥芯復位只受到其自身復位彈簧的作用,速度變慢。
由此可見,增大液控單向閥中活塞復位彈簧剛度,可使活塞復位加快,從而使閥芯即時復位,可靠關閉,改善油缸下滑現象。
5 結論
通過對操作機提升俯仰液壓系統及液控單向閥進行AMESim建模與仿真,揭示了油缸下滑原因并提出改進方法。平升缸下滑問題是由于換向閥回至中位時,液控單向閥未即時關閉所致。內部原因是液控單向閥內的控制活塞復位彈簧剛度小,使得活塞復位緩慢,給閥芯復位造成一定阻力,使閥芯關閉滯后。因此,通過增大液控單向閥控制活塞復位彈簧剛度,使活塞能迅速復位,閥芯即時關閉。此方法能有效地改善油缸下滑現象。
【1】傅新,徐明,王偉,等.鍛造操作機液壓系統設計[J].機械工程學報,2010,46(11):49 -54.
【2】冀宏,梁宏喜,胡啟輝.基于AMESim的螺紋插裝式平衡閥動態特性的分析[J].液壓與氣動,2011(10):80-83.
【3】王文深,張紀梁.平衡回路中液控單向閥反向開啟控制壓力的計算及分析{J}.機床與液壓,2003(8):63-64.
【4】GE Hao,GAO Feng.Type Design for Heavy-payload Forging Manipulators[J].Chinese Journal of Mechanical Engineering,2011,24(6):1 -9.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
