基于TMS320DM648的多車道車流量檢測系統
2014-09-18 07:12:04胡凱峰吳曉紅何小海
電視技術 2014年9期
胡凱峰,吳曉紅,楊 毅,何小海
(四川大學電子信息學院圖像信息研究所,四川成都 610064)
目前隨著交通運輸體系的飛速發展,智能交通系統(Intelligent Traffic System,ITS)已發展成為智能交通管理中的主要研究方向[1]。車流量檢測作為智能交通系統的重要研究課題之一,在理論研究方面已經取得了眾多碩果。目前世界上主要形成了美國、日本、歐盟三大ITS研究基地[2],韓國、新加坡等亞洲國家的ITS研究水平相對較高,隨著理論研究的不斷成熟,也相繼出現了各種視頻交通參數檢測方面的工業產品。
其中基于視頻的車流量檢測引起了國內外研究人員的廣泛關注,相比于傳統的微波檢測技術、環形線圈檢測技術,它具有處理簡單、信息量大、運用廣泛等優點[3]。常用的基于視頻的車流量檢測方法有灰度法、相鄰幀差法、邊緣檢測法、背景差分法。灰度法采用路面和車輛的灰度統計值來檢測車輛,但對環境光線的變化十分敏感。相鄰幀差法是將相鄰兩幀相減以檢測出運動車輛,但對運行速度過慢的車輛不能有效檢測。邊緣檢測法能夠在不同的光線條件下得到車輛的邊緣,但在車輛邊緣不明顯的情況下,該方法可能造成漏檢、誤檢。背景差分法計算當前幀與背景的差值來檢測運動車輛,是最常用的車輛檢測方法,但需要可靠的背景[4]。
考慮到國內外對智能交通系統的研究,尤其在實際產品應用上的探索,其技術方案越來越成熟,但絕大多數都是在PC機上實現的,隨著嵌入式系統的日益發展,如何在嵌入式平臺上實現車流量檢測已成為非常熱門的研究方向。本文設計了基于TMS320DM648嵌入式平臺的多車道車流量檢測系統。首先采用了基于抽樣的背景建模思想在虛擬線圈內進行背景建模,然后采用背景差分獲取運動目標,最后在虛擬線圈內對目標進行檢測。整個嵌入式系統實現了對車輛實時檢測,并且有較高的準確率,具有一定的實用性。
1 系統硬件平臺
TMS320DM648嵌入式系統硬件總體架構如圖1所示,主要集成了系統存儲模塊、視頻處理模塊、數據傳輸模塊。
存儲模塊包括的存儲設備有256 Mbyte的DDR2內存、64 Mbyte 的 NOR Flash、512 kbyte SPI EEPROM。DDR2內存為DSP/BIOS和系統軟件的運行空間,最高頻率可達533 MHz。NOR Flash用于存儲Boot loader和支持系統脫機運行。
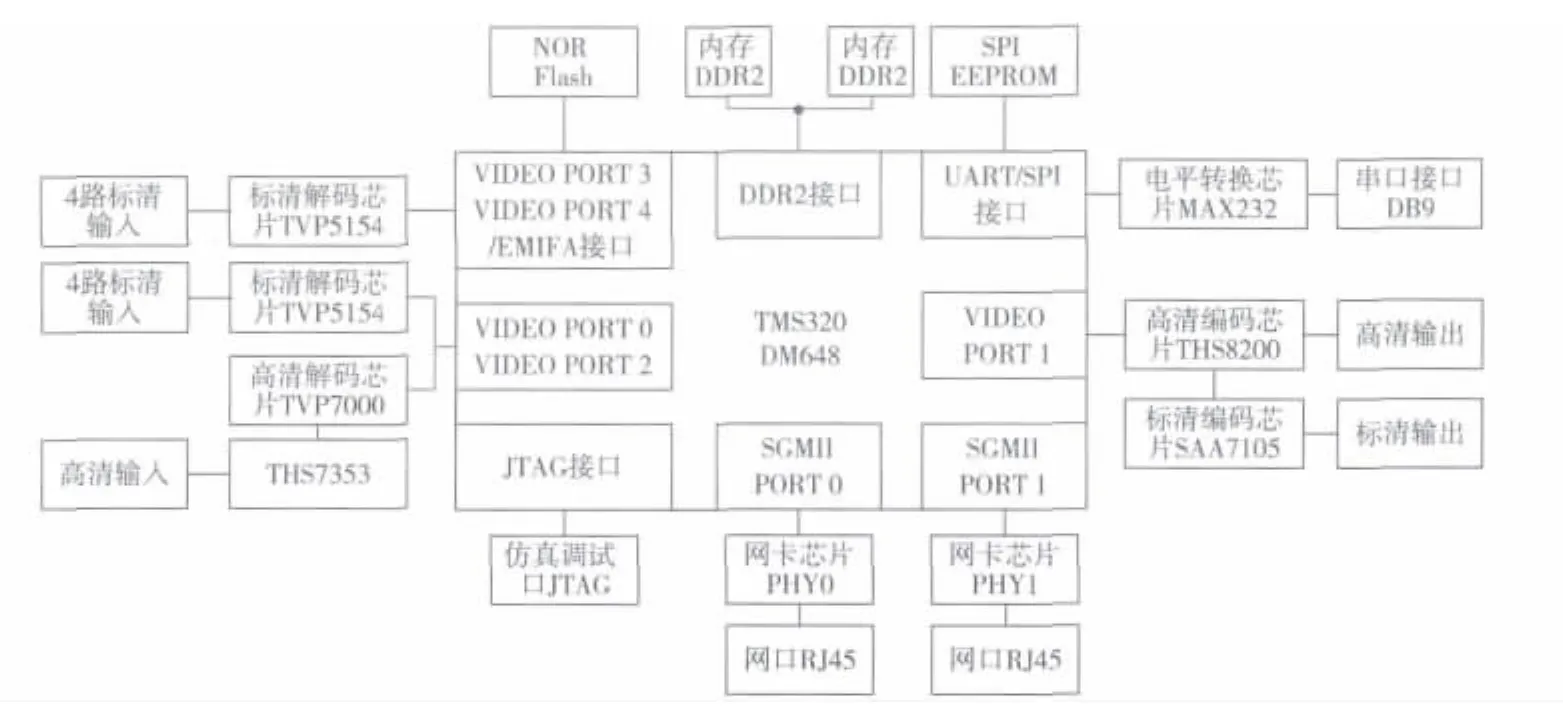
圖1 硬件框架圖
視頻處理模塊可以接收8路模擬視頻信號,將其通過TVP5154視頻解碼器解碼成YUV格式,隨后通過EDMA3的方式傳送給 TMS320DM648,經過視頻處理后,TMS320DM648通過EDMA3的方式傳送給SAA7105視頻編碼器編碼,最后連接顯示器顯示。另外可以接收1路高清視頻信號和輸出1路高清視頻信號。
數據傳輸模塊包括有2路千兆以太網、1路RS-232串口。
2 車流檢測算法的研究
車流檢測主要是采用運動目標檢測的方法來提取運動車輛,進而實現對智能交通中的車輛進行實時統計。
而常用的運動目標檢測的方法有光流法、幀差法、背景差分、塊匹配法等[5]。其中光流法和塊匹配法算法精度高、目標定位準確度高,但是運算量大,對硬件環境要求比較高,不適合在該嵌入式平臺上進行實時的車輛檢測。幀差法算法簡單,但對于運動速度比較緩慢的車輛檢測噪聲大、準確度不高。背景差分法算法簡單,只需要可靠的背景,就能夠提取出準確的目標,比較適合在該嵌入式平臺上進行車輛的實時檢測。針對以上的分析,本文采用背景差分法來提取運動目標,因而需要使用背景建模來提取可靠的背景。
其中常見的背景建模方法有平均背景建模、中值背景建模、單高斯背景建模、混合高斯背景建模等。平均背景建模、中值背景建模、單高斯背景建模算法簡單,但對于環境比較復雜的車流視頻,提取的背景噪聲比較大,檢測準確率低。混合高斯背景建模算法精度高,但是算法的運算量大,背景更新耗時大,不適合在該嵌入式平臺上進行實時處理。針對以上的問題,本文設計了基于抽樣和高斯分布相結合的背景建模算法。
2.1 基于抽樣和高斯分布的背景建模
假設車流視頻中的某一像素點(x,y)在時間軸T上的一系列連續樣本集合為{x1,x2,…,xn},根據抽樣原理采用等時間間隔ΔT對(0,T)時間內的樣本進行抽樣,其中ΔT根據不同的車流場景而定。
設抽樣樣本集合為{xm,…,xn},通過式(1)、式(2),求取樣本集合的均值um,n和方差σm,n
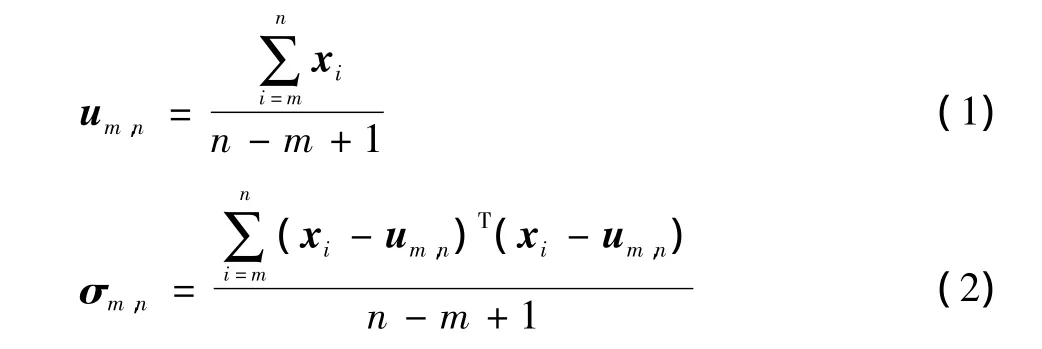
式中:um,n為圖像當前點的初始背景值。
由于實際視頻圖像中存在運動物體,上述抽樣樣本集合可能同時包含前景和背景,因而需要對樣本進行篩除,根據高斯分布的特征,盡可能選擇概率大的像素點作為學習樣本點,具體的篩除方法如下:
依次選取樣本集合{xm,…,xn}中的每一個樣本xi,對于滿足式(3)的樣本點再次采用式(1)、式(2),求取均值和方差

式中:為本次學習樣本集合的背景值;T為樣本xi與均值um,n之間波動系數。

由于實際視頻圖像中可能存在一些慢速運動的物體,導致在某次學習樣本集合得出的實際為前景樣本值,因而需要采用式(4)對新的均值樣本集進行篩除,對于滿足式(4)的所有均值樣本點采用式(1)、式(2),求取最終的均值和方差

式中:為運動圖像的最終背景值,而圖像中每個像素點的值組建了最終的背景圖,M與N為均值樣本與均值μ之間的波動系數,k為學習樣本集合的個數,0<i<k,0<N<M<3。
2.2 基于背景差分的目標提取
假設t時刻車流視頻中點(x,y)處像素值為It(x,y),背景圖像值為B(x,y),采用背景差分公式(5),求取當前圖像在(x,y)處前景的灰度值Dt(x,y)。然后采用Ostu最大類間方差法[6],求取由Dt(x,y)組成的前景圖像最佳分割閾值T。最后采用式(6),求取當前圖像在(x,y)處前景的二值圖像值Mt(x,y)
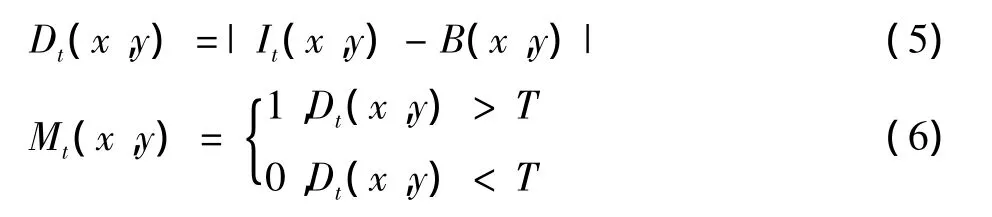
式中:Mt(x,y)為最終提取的二值化前景圖像值。
為了消除由背景差分和Ostu分割提取的二值化前景圖像帶有的噪聲,采用了形體學腐蝕操作消除目標圖像中的小點噪聲,然后采用膨脹操作重建因腐蝕操作而丟失的邊緣部分,增強目標識別的準確性。
本文采用該方法測試了一段陰天環境下城市快速路段的車流視頻序列圖,該視頻幀率為25 f/s(幀/秒),并與在混合高斯建模方法下提取的運動目標效果圖以及最終的運行時間進行了比較,具體如圖2和表1所示。

圖2 兩種不同建模方法提取目標的效果圖
從圖2和表1可以看出,使用本文提出的建模算法與混合高斯算法在提取目標效果圖基本相同的情況下,運行時間上有很大提高。

表1 兩種建模方法的運行時間對照表
3 車流量檢測的步驟及實驗分析
3.1 車流量檢測步驟
首先設置虛擬檢測線,具體的設置方法如下:
1)在車流視頻圖像的下方設置兩條相互平行、等長且垂直于車道的虛擬檢測線,其中每條檢測線的寬度為1個像素點。同時必須滿足兩條虛擬檢測線的長度包含整個車道,間距根據具體車流視頻圖像而定,大于最小車距,小于最短車輛的長度。
2)根據具體車流視頻圖像上的車道數設置每個檢測車道的檢測寬度,其中盡量保證每個車道寬度相等,彼此間距相等。
然后進行車流統計,具體統計流程如下:
1)初始化車輛狀態標志flag為-1,每個車道車輛數目count為0。
2)采用背景差分提取運動目標。
3)檢測車輛,當兩條檢測線上同時檢測有車時,將狀態標志flag置為1;當兩條檢測上同時檢測無車時,將狀態標志flag置為0,并且將當前車道車輛數目count加1,flag恢復到初始化狀態。
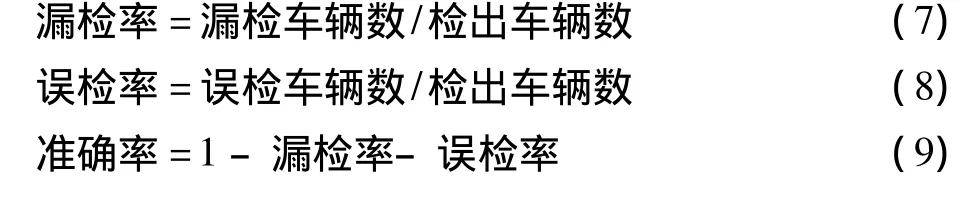
其中有車和無車的判斷主要依據目標二值圖像中虛擬檢測線上白色點的數目確定。假設檢測線長度為L,車道數目為N,當檢測到檢測線上白色點數大于采用式(7)求取的白色點數目門限值T時,則標記該檢測線上有車

3.2 多環境下車流檢測實驗及分析
本文在城市快速路錄制了5段不同天氣的車流視頻,對本文算法和高斯算法進行了車流量檢測測試。5段視頻的基本信息如表2所示。

表2 5段視頻基本信息
5段視頻車流量檢測界面如圖3所示(原圖為彩色圖片),其中白色矩形為背景建模區域,藍色矩形為車型檢測區域,橘黃色矩形為檢測線,紅色矩形為檢測到的車型。
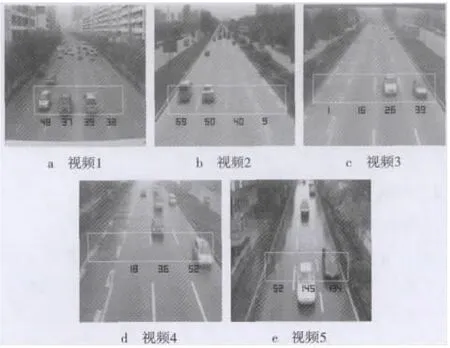
圖3 車流量檢測界面圖
其中車流量檢測的準確度衡量標準如下:
5段視頻采用本文算法和高斯算法進行車流量檢測,結果分別如表3、表4、表5、表6、表7所示。

表3 視頻1車流量檢測結果

表4 視頻2車流量檢測結果

表5 視頻3車流量檢測結果

表6 視頻4車流量檢測結果

表7 視頻5車流量檢測結果
上述表中,“—”表示車輛比較少,不進行統計。從上述表中可以看出,視頻1和2場景光線強烈,在陽光的照射下,陰影常導致相鄰車輛粘連。采用本文提出的劃分車道方法有效防止了車輛粘連產生的誤檢,提高了檢測率,平均準確率達到了94%,而高斯算法平均準確率為92%。視頻3場景光線較弱,視頻4和5場景陰雨天氣,同時伴有風,對目標提取影響較大。采用本文提出的基于虛擬線圈內進行抽樣的背景建模方法,較完整地提取出了運動車輛,有效抑制了虛擬線圈外場景變化產生的影響,提高了檢測率,陰天下平均準確率達到了94%,雨天下達到了91%,而相同條件下高斯算法陰天平均準確率為92%,雨天下達到了89%。進而表明,基于本文算法設計的TMS320DM648嵌入式平臺的多通道車流量檢測系統,準確率較高,具有一定的使用價值。
4 總結
針對傳統車輛檢測系統的局限性,本文設計實現了基于TMS320DM648嵌入式平臺的多通道車流量檢測系統。首先在虛擬線圈內采用基于抽樣的背景建模方法進行背景建模,然后采用背景差分提取運動目標,最后在虛擬線圈內對車輛進行檢測。實驗表明該DSP嵌入式系統實時檢測效果好、速度快,具有一定的使用價值。但也存在因車輛不規范行駛導致車流漏檢或誤檢的情況,因此需要研究改進。
:
[1]史其信,熊輝.展望21世紀智能交通系統(ITS)的發展[J].黑龍江工程學院學報,2001,15(1):52-56.
[2]杜麗麗.智能交通系統中視頻車輛檢測技術的研究[D].青島:中國海洋大學,2009.
[3]李宇成,李雷,王目樹.多車道的車流量統計[J].自動化儀表,2010,31(10):57-60.
[4]周世付,李建雄,沈振乾,等.基于高斯混合模型的多車道車流量檢測算法[J].計算機仿真,2012,29(10):331-335.
[5]田雨露,楊剛,王波,等.基于塊的背景重構算法研究及應用[J].液晶與顯示,2011,26(5):693-697.
[6]齊麗娜,張博,王戰凱.最大類間方差法在圖像處理中的應用[J].無線電工程,2006,7(36):25-26.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12