無人機光傳飛控系統技術研究*
2014-09-20 09:27:26彭永濤樊戰旗
彈箭與制導學報 2014年1期
關鍵詞:計算機
彭永濤,劉 林,樊戰旗
(1西安飛行自動控制研究所,西安 710065;2飛行器控制一體化技術國防科技重點實驗室,西安 710065)
0 引言
光傳飛行控制系統(fly-by-light)是使用光傳技術實現飛機飛行控制功能的系統。相比電傳控制系統,光傳控制系統可以有效防御干擾和電磁沖擊,并具有體積小、重量輕、傳輸容量大等優點,從而提高了飛行控制系統的可靠性,大大改善了飛機的操縱品質。當前國外對光傳飛控系統的研究已進入實際應用階段,開始采用數字光傳、光傳數據總線等先進技術。國內對光傳飛控系統的研究基本停留在實驗室光纖信號傳輸研究階段,技術成熟度基本處于TRL3。
文中通過對光傳飛控系統技術的研究,實踐光傳飛控系統頂層設計技術,形成面向工程化、產品化的光傳飛行控制系統的體系結構、余度管理、光總線網絡管理、部件設計等相關領域的設計技術基礎,建立了開放式可擴展的光傳飛控系統試驗驗證平臺,并基于某無人機模型完成了系統地面綜合驗證試驗,推動了國內光傳飛行控制系統的技術成熟度(TRL4),加速了光傳系統的產品化,為后續光傳系統的技術開發和工程應用奠定了堅實基礎。
1 系統方案
文中設計的無人機光傳飛控系統采用多節點分布式雙余度結構,為全時限、全權限三軸自動飛行控制系統,具備自動駕駛儀、飛行管理、余度管理、系統自檢測、飛行參數記錄等功能。
系統包括了計算機分系統、伺服作動分系統、傳感器分系統。計算機分系統包括飛行控制與管理計算機、光接口適配計算機、光組件接口適配計算機;伺服作動分系統包括機電式作動器和數字式舵機控制器;傳感器分系統包括導航系統、無線電高度表、大氣數據系統、GPS等。飛行控制與管理計算機、光接口適配計算機、光組件接口適配計算機、數字式舵機控制器采用雙余度配置;各電動舵機采用電氣二余度、機械單余度配置;光位移傳感器集成在節風門舵機中,采用雙余度配置。
系統軟件包括操作系統軟件、應用軟件和飛行支持軟件。操作系統軟件包括I/O、數據轉換、中斷處理、任務調度軟件;應用軟件包括控制律軟件、余度管理軟件、飛行管理軟件和BIT軟件;飛行支持軟件包括地面檢測軟件、飛行參數記錄與處理軟件。系統采用基于1394B總線協議的雙余度光總線,總線傳輸帶寬為400 Mbps。飛行控制與管理計算機、接口適配計算機以及3個舵機控制器之間通過光總線連接。系統組成結構如圖1所示。
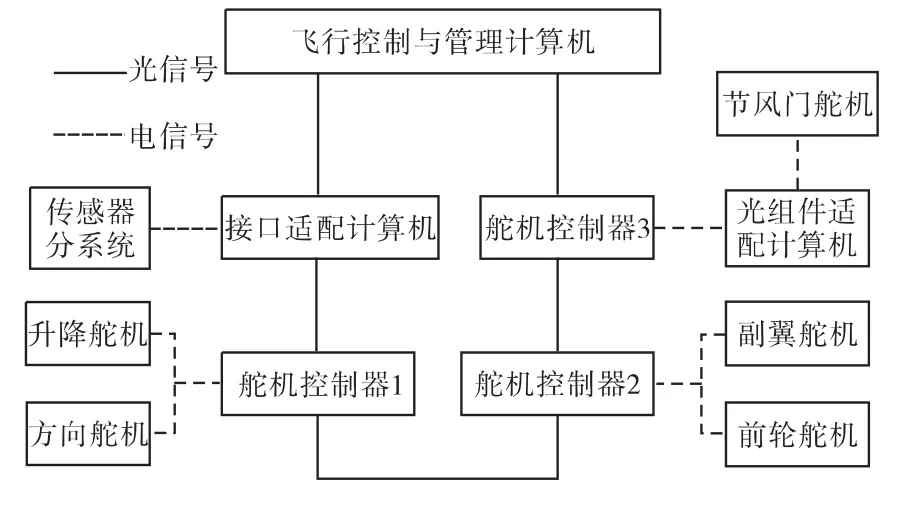
圖1 光傳飛控系統組成結構
1.1 光總線
光傳系統采用符合AS5643軍用規范的1394B總線,雙余度配置,總線傳輸帶寬為400 Mbps。飛行控制與管理計算機、舵機控制器、接口適配計算機均作為總線上的節點掛接在1394B總線上,所有掛接在光總線上部件的通信都通過該總線完成。飛行控制與管理計算機作為1394B光總線的主控制器,負責整個光總線的管理,所有的1394B總線配置為環路用以提供冗余,當一條光纖失效后,總線通信仍能保證。
光傳系統采用基于異步流包傳輸的分布式構架實現1394B總線在飛控系統中的應用,并對1394B協議進行了相應擴展以增強其實時性、可靠性。光傳系統采用的雙總線主備式工作機制,降低了系統各部件邏輯耦合程度,增強了系統容錯能力,可擴展性強。
1.2 飛行控制與管理計算機
飛行控制與管理計算機作為無人機光傳飛控系統的核心,需要完成航線裝訂和編輯、自動導引、控制律解算、飛行模態控制與轉換、數據采集、余度管理、故障檢測與處理、伺服控制指令輸出等任務,因此計算機系統需要具有高速運算能力和較高的運算精度。
飛行控制與管理計算機采用處理器和接口雙余度配置,兩個余度的所有資源均掛接在背板總線上。背板總線采用滿足時間觸發協議的雙余度自監控串行1394B光背板總線,總線傳輸速率為400 Mbps。飛行控制與管理計算機內部包括兩塊處理器/總線管理板和兩塊總線接口/數據記錄板,各功能板均為智能節點含有處理器或微控制器,對功能板上的信號進行調理和監控,節點間以數字量的方式通過串行背板總線進行傳輸。
1.3 接口適配計算機
接口適配計算機采用雙余度配置,主要實現所有與飛行控制與管理計算機相連設備的各種信號和1394B光總線信號相互轉換,以滿足雙余度無人機光傳飛控系統的要求。
1.4 舵機控制器
無人機光傳飛控系統共包括3個舵機控制器,通過1394B光總線接口完成與飛行控制與管理計算機的信息交互,實現對各電動舵機的控制。舵機控制器通過1394B光總線接收飛行控制與管理計算機對于舵面和發動機節風門的數字控制指令,經過處理后驅動其操縱機構,使舵面和節風門進行相應的偏轉。同時舵機控制器將采集到的各個舵機的狀態信息通過1394B光總線發送給飛行控制與管理計算機。舵機控制器1用于控制升降舵機和方向舵機,舵機控制器2用于控制副翼舵機和前輪舵機,舵機控制器3用于控制發動機節風門舵機。
1.5 電動舵機
升降舵、方向舵、副翼、前輪舵機均采用直流無刷電動舵機,PWM工作方式,采用雙電機共輸出軸的方式。節風門舵機為含波長編碼光信號位移傳感器的一體化數字伺服舵機,其工作方式與其它4個舵機相同,光位移傳感器完成節風門舵機的位置采集。在舵機控制器的控制下,5個電動舵機對計算機的指令進行精確跟隨。
1.6 光組件適配計算機
光組件適配計算機采用雙余度配置,包括白光光源、光譜解調儀及光信號角度處理計算機三大部分,實現了光信號從輸入到數字角度信號輸出所需設備的集成,該機箱采用最短光路傳輸設計,減少了光信號衰減。
文中所用的光位移傳感器為波長編碼光位移傳感器,是基于衍射光柵的光強分布特性設計而成的一種傳感器,衍射型波長編碼位移傳感器的工作原理如圖2所示。光傳感器在光傳飛控系統中用于測量節風門舵機的位置,在節風門舵機運動過程中,光組件適配計算機通過光路接收到光位移傳感器的位置信息后,通過光譜解調儀和光信號處理計算機將位移信號處理成數字信號,并通過RS422串口將其發送給舵機控制器用于伺服回路控制。
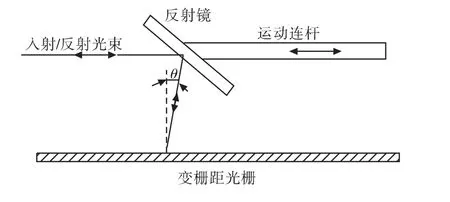
圖2 衍射型波長編碼位移傳感器工作原理圖
2 系統綜合試驗驗證
建立了一套用于驗證雙余度光傳飛控系統的試驗環境,以進行光傳飛控系統的開環試驗、閉環試驗和半物理綜合試驗。整個試驗環境以計算機、仿真資源、檢測資源為核心,包括系統綜合測試仿真設備、機載仿真設備、視景仿真設備、系統加載調試設備等。試驗環境組成與交聯關系如圖3所示。
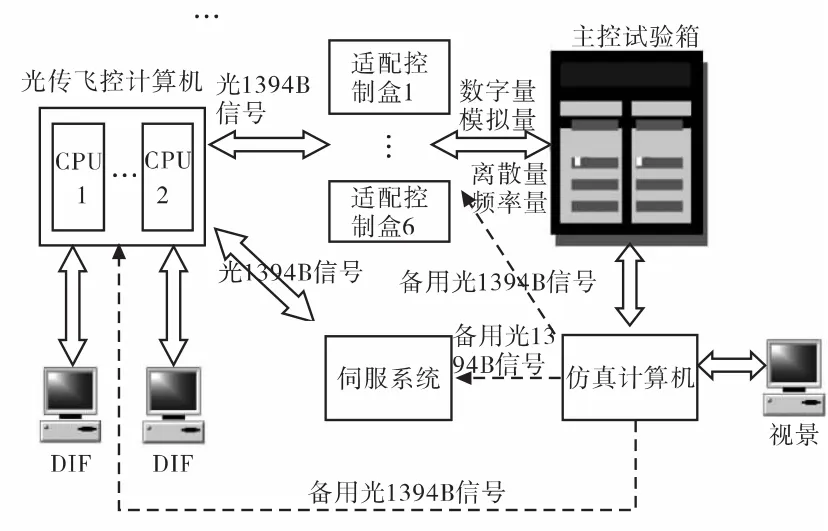
圖3 試驗環境組成和交聯關系
以某無人機為控制對象,完成了光傳飛控系統的開環綜合試驗、閉環綜合試驗、半物理仿真試驗。在無人機光傳飛控系統綜合試驗驗證過程中,飛行控制與管理計算機、伺服系統(電動舵機和舵機控制器)、接口適配計算機、光位移傳感器、光組件適配計算機均采用實物樣機,傳感器與無人機通過數學仿真實現,完成了從起飛、航線飛行、進場著陸的全過程自動飛行控制。
3 試驗結果分析
完成了無人機光傳飛控系統的地面綜合試驗,利用開發的軟件對飛行數據進行了記錄與分析。圖4是光傳系統的無人機起飛階段的俯仰角、無線電高度、發動機節風門舵機位置、飛機空速、升降舵舵機位置、副翼舵機位置,其中ins-THAER表示俯仰角,RH表示無線電高度,dtp表示節風門舵機位置,ins-V表示飛機空速,dtz表示升降舵舵機位置,dtx表示副翼舵機位置。圖5是電傳系統的無人機起飛階段的俯仰角、無線電高度、發動機節風門舵機位置、飛機空速、升降舵舵機位置、副翼舵機位置。通過對比可以看到,光傳飛控系統與電傳飛控系統的飛行指令幾乎完全一致,開發實現的光傳飛控系統的性能達到了該無人機電傳控制系統的設計要求。
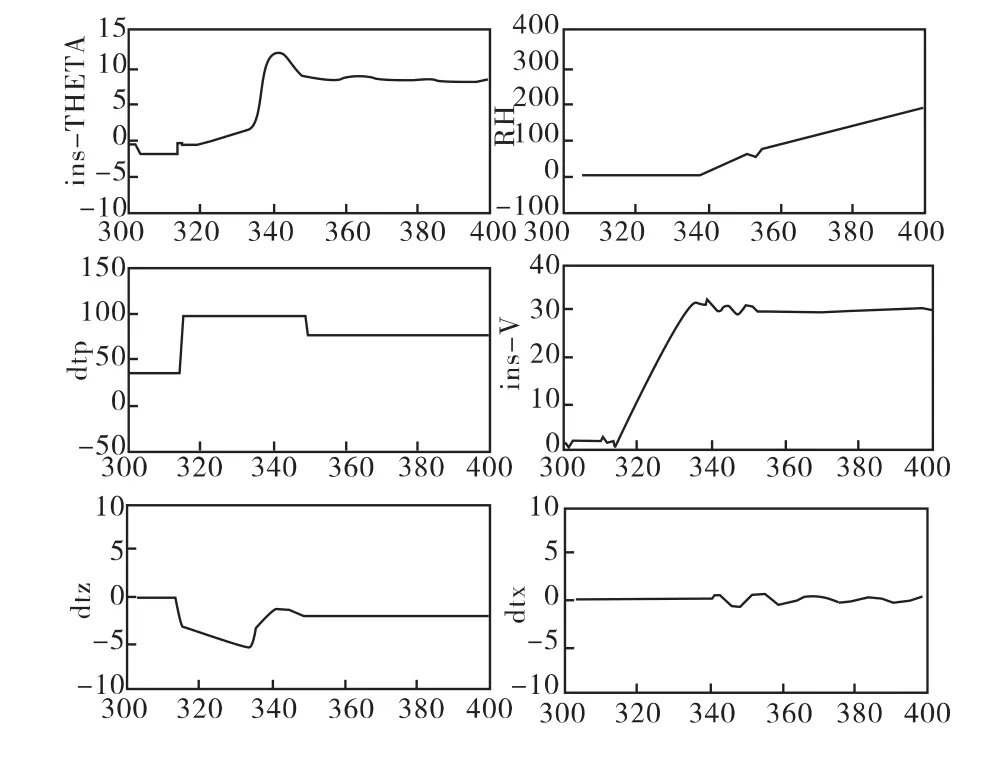
圖4 光傳飛控系統試驗數據曲線
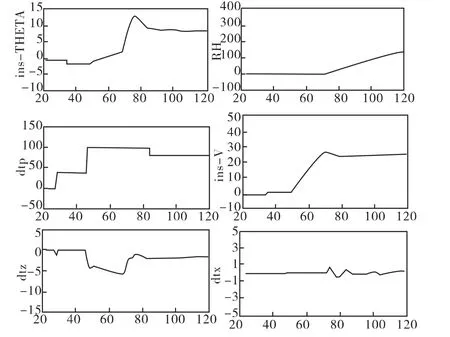
圖5 電傳飛控系統試驗數據曲線
4 結論
文中設計實現的雙余度光傳飛控系統基于IEEE-1394B總線協議的開放式系統結構,具備很強的功能擴展性和高帶寬信息傳輸能力。完成了雙余度光傳飛控系統的系統架構設計、部件研制和地面綜合試驗驗證,突破了分布式余度光傳飛控系統架構設計及驗證、雙余度高帶寬光傳數據總線傳輸及總線結構管理、光傳飛控系統工程樣機設計與實現等技術難題,設計了光傳飛控系統研制流程與規范。通過實踐無人機光傳飛控系統頂層設計技術,形成了光傳飛控系統的體系結構、余度管理、網絡管理、部件設計、系統綜合、試驗驗證等相關領域的技術基礎。
為了推動光傳飛控系統的工程化水平,后續需要進一步開展光傳飛控系統工程化實現和驗證方法的研究;繼續開展光傳系統環境適應性的研究,包括未來先進戰機的使用環境條件;開展基于分布式體系架構的光傳飛控系統技術研究,形成通用的分布式光傳飛控系統試驗驗證平臺。
[1]Todd JR.A review of the fly-by-light optical Aileron trim flight demonstration system [C]//SPIE,1998,Vol.3541:176-178.
[2]Robert Gargano.Fly-by-light optical bus interface module(OBIM)[C]//SPIE,1995,Vol.2467:150 -159.
[3]Kevin C Scholten.Fiber optic gyro inertialmeasurement unit for fly-by-light advanced systems hardware[C]//SPIE Vol.2292,2003.
[4]李玉飛,蘇媛.光傳飛行控制系統研究[J].航空科學技術,2009(3):7 -11.
[5]李昆,王少萍.光傳飛控系統的發展趨勢[J].北京航空航天大學學報,2003,29(12):1068 -1072.
[6]郭鎖鳳,申功璋,吳成富.先進飛行控制系統[M].北京:國防工業出版社,2003.
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數學)(2020年9期)2020-06-09 05:35:08
鐵道通信信號(2020年12期)2020-03-29 06:21:58
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
消費導刊(2017年20期)2018-01-03 06:26:40
電子制作(2017年14期)2017-12-18 07:08:10
辦公自動化(2016年18期)2016-08-20 12:50:22
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鐵道通信信號(2016年3期)2016-06-01 12:10:18
