矩形隧道掘進模擬機的研究與開發
2014-09-20 09:38:04
建筑施工 2014年3期
上海市機械施工集團有限公司 上海 200072
1 概述
矩形隧道與傳統圓形隧道相比,能充分利用結構斷面,減少地下掘進面積,不僅節約資源,降低造價,而且有利于對既有建筑、管線的保護,減少施工對環境影響,是一項“資源節約、環境友好”的新技術、新工藝[1],目前已在上海城市建筑密集、交通流量較大的地區地下人行通道等施工中得到越來越多的應用。
隨著矩形隧道應用的發展,施工企業技術培訓、專科院校施工教學都提出了培養矩形隧道施工技術人員、矩形隧道掘進機操作人員的要求。這是一門實踐性很強的課程,單純依靠教材上的文字、圖紙、照片難以形象直觀地進行教學表達,也不能培養學員的實際動手能力。考慮到矩形隧道掘進機造價昂貴,以及施工安全等問題,又不宜以真實的掘進機在真實的施工環境中對學員進行教學、培訓和訓練。因此亟需發明一種以計算機仿真、三維動畫等高新技術實現的、能夠比較形象地演示施工情況、供學員操作的矩形隧道掘進模擬機(以下簡稱模擬機),以達到或接近真實的矩形隧道掘進機(以下簡稱真實機)的施工效果,提高教學、培訓的水平和質量。
本文闡述模擬機的原理、構成和功能,介紹其研究開發中的關鍵技術。
2 模擬機的原理和構成
真實機由控制系統和機械系統構成,控制系統操控機械系統,對施工對象(地下土體等)進行掘進施工,機械系統通過傳感檢測電路,將自身的狀態和施工對象的狀態反饋給控制系統。
模擬機由控制系統、虛擬處理系統和仿真顯示系統構成,虛擬處理系統根據控制系統的指令,通過虛擬運算,進行掘進機物理仿真,一方面驅動仿真顯示系統,以三維動畫演繹掘進機施工,另一方面模仿掘進機和施工對象,向控制系統反饋施工狀態[2]。因此虛擬處理系統和仿真顯示系統共同擔當真實機的機械系統和施工對象的作用。
模擬機的控制系統與真實機的控制系統,在基本原理、設備外形、操作界面上完全一致,使操作者使用時無異于真實機。在內部電路、輸入輸出接口上與真實機有所區別,因為其驅動的是計算機仿真模型,而非真實的機械系統;其接收的反饋信息是計算機模擬的,而非來自真實的掘進機和施工對象。
模擬機的虛擬處理系統和仿真顯示系統都有人機界面。虛擬處理系統的人機界面供教師使用,可以設置、修改模擬機的各種性能、參數、模式,可以對操作者進行考核、評分[3]。仿真顯示系統的人機界面用于鏡頭、視圖等交互操作,使用者可以全方位、多視角地觀看,可以實現透視、隱蔽等各種特殊視覺效果,還可以回放歷史數據。虛擬處理系統和仿真顯示系統分別安裝在PC計算機上運行,與控制系統主機(PLC)以數據通訊線連接。
3 模擬機的控制系統
模擬機控制系統的操作界面與真實機的完全相同,包括控制臺操作板、控制臺內開關和觸摸屏界面,操作方法和真實機相同。
3.1 控制臺操作板
控制臺操作板是模擬機的主要操作界面,其控件包括:系統控件:控制電源開關、聯絡按鈕、變頻器復位按鈕、警報停止按鈕、緊急停止按鈕;刀盤控件:刀盤運轉開關、刀盤轉速旋鈕;左、右螺旋機控件:螺旋機運轉開關、螺旋機正轉指示燈、螺旋機反轉按鈕(帶指示燈)、螺旋機轉速旋鈕、出土閘門開關;糾偏控件:總閥門開關、左閥門開關、右閥門開關、注泥泵開關;后頂控件:后頂啟停開關、后頂方式設置按鈕、后頂油缸伸出按鈕、后頂油缸縮進按鈕、后頂速度設置旋鈕;其他控件:氣密泵開關、注漿泵開關、排土泵開關。
3.2 控制臺內開關
在控制臺操作板的下方箱體里,安裝有掘進機的連鎖開關,用于確定各主要部件動作的時序連鎖,主要有:“排土泵→螺旋機”連鎖開關、“排土泵→刀盤”連鎖開關、“刀盤→螺旋機”連鎖開關、“后推進→螺旋機”連鎖開關、“側滾角度→刀盤”連鎖開關、“刀盤→后推進”連鎖開關、“給脂間斷→連續”設置開關等。
3.3 觸摸屏界面
控制臺上有兩個觸摸屏,也是模擬機的主要操作界面,包括:掘進控制、運行監控、糾偏操作、泵站啟停、系統設置、模擬數據、異常報警,以及后頂推進操作等十多個畫面。
4 模擬機的虛擬處理系統
模擬機的虛擬處理系統安裝在PC計算機上運行。它接收控制系統的指令,按虛擬運算規則進行掘進機物理仿真,將模擬的動作、狀態信息傳送給仿真顯示系統,驅動掘進機仿真模型和施工環境仿真模型,演繹掘進施工,同時將模擬的狀態信息反饋給控制系統,形成一個完整的控制回路。
虛擬處理系統的主要功能有:數據通訊、物理仿真、事件模擬、運行監視、作業管理、系統管理等六類。
4.1 數據通訊
虛擬處理系統以串口通訊協議與控制臺PLC連接,以以太網通訊協議與仿真顯示系統連接。通訊是自動、強制進行的,在通訊失穩時能自動重試接續,并將出錯信息寫入日志文件備查。
4.2 物理仿真
掘進機物理仿真的內容主要為動作仿真和狀態仿真。動作仿真要模擬掘進機各項動作的形式、方向、行程、時間、速度、軌跡等,狀態仿真要模擬掘進機和施工對象的幾何形態、體積、容積等變化,還要模擬壓力、轉矩等物理量及其變化。
仿真算法要解決時間效應問題,例如:為彌補通訊延遲,需要對運動采樣進行流暢、平滑處理,為模擬運動阻力、慣性,需要對模擬機的響應做延時、遲滯處理,等等。
4.3 事件模擬
操作者可以通過“偏差模擬器”、“事件模擬器”,產生模擬的偏差、故障,滿足教學、實習需要。各種模擬的觸發、波動機制有如下幾種:
(a) 手動觸發、波動;
(b) 定點觸發、波動;
(c) 定時或周期性觸發、波動;
(d)函數觸發、波動,模擬外界擾動的發生、變化。
4.4 運行監視
模擬機運行監視窗口有:系統狀況、刀盤切削、螺旋排土、后頂推進、鉸接和其它等5 個。
4.5 作業管理
一位操作者的一次上機操作稱為一次作業。作業啟動時登記作業的名稱、類別、內容、操作者、指導教師等信息[4]。作業啟動后,系統就自動記錄本次作業的所有操作指令、運行數據,按規定格式存入數據庫,記錄的數據可以查詢,可以回放,以重現操作者的上機過程和情況。作業終止時結束數據記錄。作業終止后還可以恢復,自剛才終止處繼續記錄下去。也可以重啟,重啟時該作業之前的記錄全部廢除,重新開始記錄。作業管理功能記錄的作業數據,也是一份完整的模擬機教學、上機檔案。
4.6 系統管理
系統管理功能包括:基礎信息維護、系統參數的導出與導入,以及數據庫的備份與恢復等。
5 模擬機的仿真顯示系統
模擬機的仿真顯示系統需要安裝在高性能圖形處理計算機上,通過以太網與虛擬處理系統連接。可以同時連接多臺仿真顯示系統,實現多終端異地應用。
仿真顯示系統的核心是掘進機仿真模型、施工環境仿真模型,以及仿真模型驅動程序。仿真顯示系統的人機界面提供齊全的三維交互功能,使模擬機可以更好地用于技術培訓和教學實訓。
5.1 掘進機仿真模型
掘進機仿真模型以上海機械施工集團研發的TH691PMX-1矩形隧道掘進機為藍本建立,其主要構成如下:
(a)掘進機機身。是掘進機的外殼,又稱盾殼,殼內安裝了掘進機的主要機構和裝置。機身分為前中后3 段,前段的外端面裝置有組合刀盤和周邊刀,中段分為前后鑲嵌鉸接的2 部分,通過鉸接油缸的不同伸縮,改變前后部分的鉸接角度,可以使機身上下左右微轉,從而微調掘進機前進姿態,糾正掘進軸線偏差。鉸接處采用充氣橡膠密封。
(b)刀盤切削系統(圖1)。包括6 套組合刀盤(每套有1 臺變頻器、3 臺電機以及若干刀具)。刀盤切削系統的運行原理是:由控制系統控制變頻器驅動刀盤電機轉動,通過減速齒輪箱帶動刀盤旋轉,以刀盤旋轉來切削前方土體,達到向前掘進并支撐開挖面土體的目的。6 套刀盤既可以正轉,也可以反轉,可以聯動,也可單獨轉動。

圖1 掘進機機身和刀盤切削系統的仿真模型
(c)螺旋排土系統。又稱土壓平衡系統,包括2 套螺旋機、2 臺泵站、2 套出土閘門、4 個土壓傳感器、1 套排土泵等。螺旋排土系統的運行原理是:由控制系統驅動油馬達,帶動螺旋機轉動,以螺旋機旋轉來抽出刀盤切削下來的渣土,再由排土泵將渣土排出到集土坑內;通過改變螺旋機轉速控制排土量,可以調節土壓力。
(d)鉸接糾偏系統。包括盾殼鉸接處上、下、左、右4 組液壓鉸接油缸、2 臺泵站、1 臺傾斜儀。鉸接糾偏系統的運行原理是:由控制系統驅動液壓鉸接油缸,帶動機頭上下左右轉動,微調掘進機前進方向,從而糾正掘進軸線偏差。
(e)注泥糾側、注脂密封、注漿減摩、氣壓密封等系統。注泥系統以注泥壓力影響掘進機左側或右側升降,糾正機身的側轉。注脂密封系統將潤滑油脂打到刀盤唇口密封處和螺旋機唇口密封處,阻擋機外泥土進入機內。氣壓密封系統將空氣壓力打入機身鉸接處的內、外周密封氣囊,阻擋機外泥土進入機內。注漿減摩系統將泥漿注出于掘進機機身的外表面,用于減小掘進的摩阻力(圖2)。
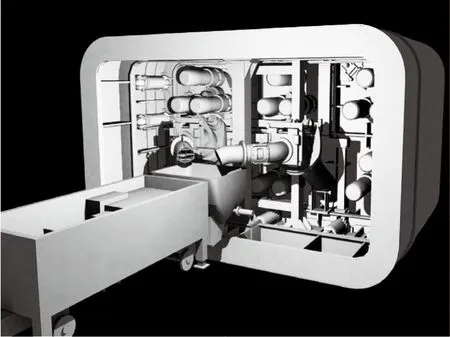
圖2 螺旋排土系統的仿真模型
(f )后頂推進系統。固定設置在始發井的最后面,由頂推油缸、U形頂鐵、發射架、鋼后靠等部分組成。后頂推進系統的運行原理是:由控制系統驅動頂推油缸伸縮,將管節和機頭向前推進;通過改變后頂推進速度改變土倉出土量,可以調節掘進面土壓力,實現土壓平衡(圖3)。
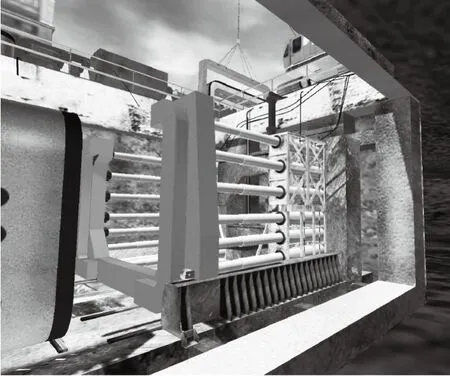
圖3 后頂推進系統的仿真模型
(g)管節吊裝系統:包括起重機、吊索、鐵扁擔等。管節吊裝系統不是掘進機本身的組成部分,而是為它服務的施工機械。實際施工中,管節吊裝是由起重機司機操作,將管節從地面上吊到始發井下,就位于先前已安裝頂進的管節和后頂推進系統之間。為完整表現矩形隧道施工過程,模擬機配置了管節吊裝系統。
5.2 施工環境仿真模型
模擬機的施工環境仿真模型有5 項:矩形隧道掘進機車間、矩形隧道施工工地、矩形隧道始發井、掘進土體及已掘進的隧道、矩形隧道接收井(圖4、圖5)。

圖4 矩形隧道施工的工地鳥瞰
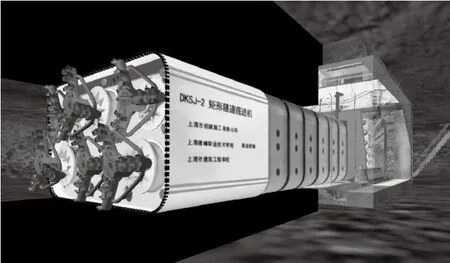
圖5 矩形隧道掘進的地下施工場景
5.3 仿真顯示系統的人機界面
仿真顯示系統可以供用戶操控的功能主要有:
(a)模式設置。監視模式:仿真顯示系統作為掘進機的監視器,保持與虛擬處理系統的通訊,接收其發來的數據,顯示掘進機實時的施工畫面和有關信息。
回放模式:仿真顯示系統作為歷史數據的回放器,用戶可以通過回放管理器播放以前的作業情景。回放的歷史數據可以來自模擬機數據庫,也可以來自顯示終端本機的數據庫(從模擬機數據庫下載到本地)。
(b)各種窗口的開關。仿真顯示系統具有許多彈出窗口(圖6),其中用作系統狀態或作業信息提示的有:①系統狀態板、②作業信息板、③數字儀表板;用作仿真互動的有:④鏡頭定位板、⑤3D顯示效果設置板;用作功能操控的有:⑥回放管理器、⑦鏡頭巡視器等。這些窗口可以隨意打開、關閉、拖動。

圖6 仿真顯示系統的部分彈出窗口
(c) 仿真交互功能。用戶通過仿真交互功能,可以進行三維場景切換、鏡頭操作、視圖制作和選用、3D效果設置等,滿足各種使用需要。
(d)自動巡視:按事先規定的軌跡,自動地移動鏡頭,變換鏡頭的視距、視角,連續地展示三維仿真場景的各個部位,就像播放錄像一樣。
(e)作業回放管理:選擇回放的對象、范圍、速度、方式,進行播放、暫停、快進、快倒、停止等操作。
(f)系統設置、維護:包括運行性能設置、管理權限的設置、數據的導出與導入等。
6 模擬機的使用功能
6.1 學習掘進機的機械結構、原理
教師通過圖示掘進機的機構、部件,介紹掘進機的機械結構、原理。可以使用鏡頭操控、視圖切換等功能,以及隱藏、單顯、剖視、透明等特殊手段,實現最佳教學效果。
6.2 學習掘進機的操作方法
學員可以在控制臺上操作模擬機,學習掘進機的操作。學習內容主要如下:
(a)總體控制:掘進機啟動、停止,各類泵啟動、停止,緊急停止等。
(b)刀盤系統:刀盤啟停、變速、變向,觀察刀盤扭矩等。
(c)螺旋機和出土閘門:螺旋機啟停、變速、變向,出土閘門開大、關小,觀察土壓力變化、螺旋機壓力等。
(d)鉸接糾偏系統:鉸接油缸全伸、全縮,機頭上轉、下轉、左轉、右轉,觀察鉸接油缸的伸出長度、掘進軸線偏差、機身傾斜角度的變化等。
(e)注泥糾側系統:注泥泵啟停,注泥總閥、左閥、右閥的開大和關小,觀察注泥壓力、機身側轉角的變化等。
(f)注脂密封、注漿減摩、氣壓密封等系統:觀察各相關數值的變化。
(g)后頂推進系統:后頂油缸的選擇,后頂油缸伸出、縮進:觀察后頂壓力、推進距離等。
(h)管節安裝:掘進模式與管節安裝模式的切換,啟動、觀察管節吊裝過程,操作后頂油缸推進、拼裝管節,觀察管節安裝環數等。
6.3 學習掘進施工的工藝流程
模擬機模擬的施工流程或操作流程有如下幾種:
(a)掘進機出洞(頂出始發井)進入土體;
(b)掘進機在土體內掘進施工;
(c)管節吊裝和拼裝;
(d)掘進機完成掘進后進洞(進入接收井)。
6.4 學習掘進中的施工控制
教師可以在虛擬處理系統上設置各類參數、偏差、事件等,既可以通過控制臺上的實際操作,講解掘進中施工控制知識,也可以讓學員上機操作,熟悉、掌握各項施工控制方法。
掘進中的施工控制主要內容有:土壓平衡的控制、掘進軸線偏差的糾正、機身側滾的糾正、施工中有關偏差的糾正、施工中設備故障的檢查與排除、施工中設備過載的診斷與排除等。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48
