電磁斥力機(jī)構(gòu)緩沖方法研究
2014-09-21 05:35:00曹鵬飛姜楠趙成宏
船電技術(shù) 2014年7期
關(guān)鍵詞:設(shè)計(jì)
曹鵬飛, 姜楠, 趙成宏
(武漢船用電力推進(jìn)裝置研究所,武漢 430064)
0 引言
近年來(lái),隨著直流供電系統(tǒng)的飛速發(fā)展,發(fā)展快速直流開(kāi)關(guān)已成為滿足直流輸電系統(tǒng)中低端保護(hù)需求的必然趨勢(shì)。當(dāng)系統(tǒng)出現(xiàn)短路故障時(shí),如果能夠在很短的時(shí)間內(nèi)分?jǐn)喙收想娏鳎瑢?duì)于大容量直流系統(tǒng)的保護(hù)就會(huì)更加有利,因此就需要研究開(kāi)發(fā)性能可靠的快速直流開(kāi)關(guān)。
開(kāi)發(fā)快速直流開(kāi)關(guān)技術(shù)關(guān)鍵技術(shù)之一就是需要設(shè)計(jì)快速的、合理可靠的快速操作機(jī)構(gòu)。高速電磁斥力機(jī)構(gòu)是近幾年國(guó)內(nèi)外研究較多的操作機(jī)構(gòu)之一。電磁斥力機(jī)構(gòu)的快速性必然帶來(lái)開(kāi)關(guān)合分閘的彈跳問(wèn)題,彈跳過(guò)大將會(huì)影響整個(gè)電網(wǎng)的安全性和穩(wěn)定性。因此,對(duì)電磁斥力機(jī)構(gòu)的緩沖方式進(jìn)行研究,有很重要的意義。
1 電磁斥力機(jī)構(gòu)工作原理及國(guó)內(nèi)外概況
電磁斥力機(jī)構(gòu)最早是在1969年提出的,但引起廣泛關(guān)注則是近10多年。電磁推斥機(jī)構(gòu)的基本回路及裝置形式如圖1所示。

其工作原理為:通過(guò)預(yù)先充電的電容器向分閘或合閘線圈放電,通過(guò)線圈放電產(chǎn)生脈沖電流,在該脈沖電流的作用下,線圈周圍產(chǎn)生交變的磁場(chǎng),并在鋁盤(pán)上產(chǎn)生渦流,渦流產(chǎn)生的磁場(chǎng)和線圈產(chǎn)生的磁場(chǎng)相互作用,從而帶動(dòng)連桿運(yùn)動(dòng),實(shí)現(xiàn)開(kāi)關(guān)的分?jǐn)嗷蜿P(guān)合。
目前國(guó)際上日本、荷蘭、韓國(guó)等國(guó)家都在大力開(kāi)展電磁斥力操作機(jī)構(gòu)的研究工作。日本三菱公司開(kāi)發(fā)了快速真空斷路器,采用電磁斥力操作機(jī)構(gòu),在1周波以內(nèi)完成故障電流開(kāi)斷。荷蘭、韓國(guó)關(guān)于電磁斥力操作機(jī)構(gòu)的研究已有多篇論文發(fā)表。國(guó)內(nèi)山東大學(xué)和大連理工大學(xué)對(duì)電磁斥力操作機(jī)構(gòu)也進(jìn)行了一定理論研究。
2 電磁斥力機(jī)構(gòu)分閘緩沖與彈振
近年來(lái)隨著新材料的使用,快速開(kāi)關(guān)逐漸向小開(kāi)距化發(fā)展,分閘彈振容易造成觸頭分?jǐn)嗪蟮幕『笾負(fù)舸瑢?dǎo)致分?jǐn)嗍。送猓^(guò)大的彈振幅度以及過(guò)多的彈振次數(shù)容易導(dǎo)致器件的損壞,降低開(kāi)關(guān)的使用壽命。
圖2為一種典型的用電磁斥力機(jī)構(gòu)的快速開(kāi)關(guān)結(jié)構(gòu)圖,電磁斥力機(jī)構(gòu)動(dòng)作行程短、速度快,尤其對(duì)剛分速度要求較高,其行程末期的速度更高,將會(huì)對(duì)真空滅弧室波紋管造成致命的損傷。因此,合理設(shè)計(jì)緩沖對(duì)于電磁斥力機(jī)構(gòu)非常重要。而且由于其緩沖距離短,需要在很小的距離內(nèi)將快速運(yùn)動(dòng)部件的動(dòng)能消耗掉,因此緩沖設(shè)計(jì)也是其難點(diǎn)之一。本文將對(duì)幾種常用的緩沖方式進(jìn)行對(duì)比分析。

2.1 彈簧緩沖
傳統(tǒng)的分閘緩沖常采用彈簧緩沖,將運(yùn)動(dòng)部件的動(dòng)能轉(zhuǎn)換為彈簧的彈性勢(shì)能存儲(chǔ)起來(lái),既起到分閘緩沖作用,又可提高機(jī)構(gòu)的合閘速度。
參照?qǐng)D2模型,若采用彈簧緩沖,設(shè)緩沖彈簧的剛度為EH。運(yùn)動(dòng)部件質(zhì)量m=5kg,速度為v=8m/s。緩沖距離s=2mm。根據(jù)能量守恒定律有:

由上式求得 EH= 8 × 1 07N/m,可見(jiàn)所需要的緩沖彈簧的剛度極大,如此大剛度的緩沖彈簧帶來(lái)了一系列的問(wèn)題:
1)彈簧尺寸很大,難以安裝布置。
2)若將運(yùn)動(dòng)部件與緩沖彈簧一起固定到該位置,則需要非常大的保持力,難以實(shí)現(xiàn)。
3)即使通過(guò)合理的設(shè)計(jì),如采用鎖扣或者永磁機(jī)構(gòu)將運(yùn)動(dòng)部件與緩沖彈簧保持在緩沖位置,將運(yùn)動(dòng)部件的動(dòng)能存儲(chǔ)在緩沖彈簧里,那么在合閘過(guò)程中,緩沖彈簧的彈性勢(shì)能轉(zhuǎn)換為運(yùn)動(dòng)部件的動(dòng)能,將使運(yùn)動(dòng)部件合閘速度過(guò)高,動(dòng)、靜觸頭產(chǎn)生強(qiáng)烈的碰撞,帶來(lái)很大的合閘彈跳問(wèn)題。
2.2 電磁斥力緩沖
同樣是基于渦流感應(yīng)原理,在原有斥力機(jī)構(gòu)的斥力盤(pán)的另一面再添加一個(gè)線圈,作為緩沖線圈,通過(guò)精確的控制,在斥力盤(pán)運(yùn)動(dòng)到行程末期時(shí),在緩沖線圈中通入一脈沖電流,該脈沖電流在斥力盤(pán)中產(chǎn)生感應(yīng)渦流,從而對(duì)斥力盤(pán)施加與斥力盤(pán)運(yùn)動(dòng)方向相反的力,起到緩沖作用。
通過(guò)合理地設(shè)計(jì)緩沖線圈參數(shù)及其放電回路參數(shù),并且在適當(dāng)?shù)臅r(shí)刻投入緩沖,可以取得很好的緩沖效果。但是,這種緩沖裝置也具有如下缺陷:
1) 需要額外增加一個(gè)線圈及其放電回路及儲(chǔ)能電容的充電回路,增加了開(kāi)關(guān)的質(zhì)量和體積。
2) 該緩沖方式還需要額外的位置傳感專制,用于確定緩沖投入時(shí)刻,增加了成本。
3) 需要精確的控制,增加了機(jī)構(gòu)的復(fù)雜性,降低了可靠性。
2.3 氣(油)缸緩沖
氣缸緩沖的原理如圖3所示,其中,斥力盤(pán)起到了氣缸中的活塞的作用。在斥力盤(pán)向下運(yùn)動(dòng)拉動(dòng)觸頭分閘的過(guò)程中,斥力盤(pán)壓縮氣缸下部空氣,下部氣壓增大,上部氣壓減小,形成壓強(qiáng)差,從而在斥力盤(pán)上產(chǎn)生阻礙斥力盤(pán)運(yùn)動(dòng)的反力,起到緩沖作用。

氣壓P與斥力盤(pán)位移s是一個(gè)反雙曲線的變換形式,如圖4所示。從圖中可以看出,在斥力盤(pán)運(yùn)動(dòng)位移s相對(duì)氣缸下部初始深度hd較小時(shí),隨著位移s的增大,氣壓P增大得很慢,這主要是因?yàn)槌跏伎諝饷芏刃。湮镔|(zhì)的量比較小。當(dāng)位移s比較接近hd時(shí), 隨著位移s的增大,氣壓P顯著增大。
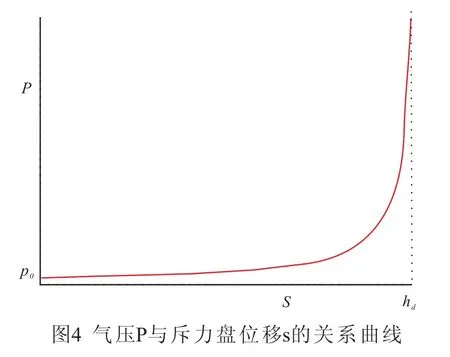
如果僅從上述反力特性來(lái)看,氣缸緩沖還是很適合作為電磁斥力機(jī)構(gòu)的緩沖裝置的,它有如下優(yōu)點(diǎn):a)在斥力盤(pán)運(yùn)動(dòng)前中期,反力很小,對(duì)提高機(jī)構(gòu)快速性影響不大,而在斥力盤(pán)運(yùn)動(dòng)后期,反力迅速增大,有效地起到緩沖作用;b)整個(gè)緩沖裝置僅需要在斥力盤(pán)周圍添加一個(gè)外罩,形成氣缸,結(jié)構(gòu)簡(jiǎn)單、緊湊;c)可以集分閘緩沖與合閘緩沖于一體。
然而,上述分析都是在不考慮減壓孔以及氣體溫度變化的基礎(chǔ)上進(jìn)行的。設(shè)計(jì)氣缸緩沖時(shí),準(zhǔn)確設(shè)計(jì)氣缸緩沖的關(guān)鍵參數(shù)如減壓孔尺寸是非常困難的。此外,設(shè)計(jì)氣缸緩沖還存在其他問(wèn)題,總結(jié)如下:a)設(shè)計(jì)過(guò)程復(fù)雜、計(jì)算難度大。b)零件生產(chǎn)加工精度要求極高,尤其是與斥力盤(pán)的配合。c)設(shè)計(jì)機(jī)構(gòu)行程較短時(shí),氣缸緩沖的有效緩沖距離短,要在如此短的距離內(nèi)將高速運(yùn)動(dòng)的斥力盤(pán)等運(yùn)動(dòng)部件速度降到零,勢(shì)必需要提供極大的緩沖反力,粗略估算一下其反力峰值即在速度降為零、氣體壓縮量最大時(shí)能達(dá)到上百千牛,如此大的反力給分閘保持也帶來(lái)一定的問(wèn)題,如機(jī)械鎖扣的零件強(qiáng)度等。從上述分析可見(jiàn),氣缸緩沖方式具有其獨(dú)特的優(yōu)點(diǎn),也具有一定的可行性,但是設(shè)計(jì)難度很大,生產(chǎn)加工精度要求很高,同時(shí),氣缸緩沖也給其他部件帶來(lái)了一定的負(fù)面影響。
2.4 碰撞緩沖
由于動(dòng)量在兩個(gè)物體的任何碰撞中都是守恒的,可以設(shè)想,當(dāng)斥力盤(pán)在行程末期與一個(gè)待碰撞物體碰撞后,其速度必然減小,合理地設(shè)計(jì)待碰撞物體的質(zhì)量,斥力盤(pán)等運(yùn)動(dòng)部件的速度可以降為零,很好地滿足了緩沖的要求。此外,由于待碰撞物體自身的緩沖行程要求相對(duì)較低,緩沖行程可以相對(duì)較大,能量在這個(gè)過(guò)程中慢慢消耗,因此,待碰撞物體的緩沖以及復(fù)位設(shè)計(jì)相對(duì)簡(jiǎn)單。碰撞緩沖設(shè)計(jì)的關(guān)鍵是待碰撞物體的質(zhì)量計(jì)算。
斥力盤(pán)等運(yùn)動(dòng)部件的總質(zhì)量為m,其行程末期的速度為v1現(xiàn)假設(shè)待碰撞物體的質(zhì)量為m2,碰撞后,斥力盤(pán)等運(yùn)動(dòng)部件的速度為v2,待碰撞物體的速度為u,由動(dòng)量守恒定律有:

假設(shè)碰撞過(guò)程是理想彈性碰撞,即碰撞過(guò)程沒(méi)有能量損失,由機(jī)械能守恒定律有:
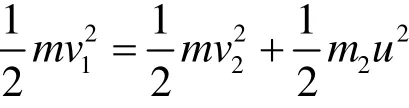
可得
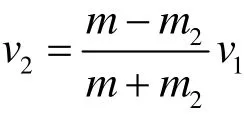
可見(jiàn),當(dāng)待碰撞物體的質(zhì)量與斥力盤(pán)等運(yùn)動(dòng)部件質(zhì)量相等時(shí),碰撞后,斥力盤(pán)等運(yùn)動(dòng)部件的速度降為零,是非常理想的緩沖。
假設(shè)碰撞后的總動(dòng)能為碰撞前的α倍, α是由碰撞物體的材料決定的,α越小,碰撞過(guò)程中動(dòng)能損失越大,即碰撞后,待碰撞物體的動(dòng)能越小,越有利于待碰撞物體的緩沖與復(fù)位設(shè)計(jì)。與此同時(shí),α越小也帶來(lái)了待碰撞物體的質(zhì)量和體積越大的不利影響。因此,需要結(jié)合實(shí)際綜合考慮選取適當(dāng)?shù)牟牧稀?/p>
本文采用碰撞緩沖作為分閘緩沖方式,設(shè)計(jì)電磁斥力機(jī)構(gòu)。理論上講,碰撞后,動(dòng)觸頭等運(yùn)動(dòng)部件速度為零,考慮到實(shí)際情況下,存在摩擦等能量損失,且參數(shù)α是通過(guò)實(shí)驗(yàn)總結(jié)的,具有一定的統(tǒng)計(jì)誤差,因此,碰撞后動(dòng)觸頭等運(yùn)動(dòng)部件的速度可能并不為零。
在碰撞緩沖的基礎(chǔ)上設(shè)計(jì)添加限位擋板,限位擋板與分閘保持鎖扣共同作用可有效防止觸頭的分閘彈振。
[1]張文淵.真空斷路器合閘彈跳的危害性及對(duì)策.華北電力技術(shù), 2001,4(36):12-14.
[2]劉君懷.真空斷路器的調(diào)試經(jīng)驗(yàn).高壓電器,1999,5(1):25-26.
[3]敖登貴,汪泰宇.限流斷路器利用電動(dòng)斥力快速斥開(kāi)動(dòng)觸頭后產(chǎn)生的問(wèn)題.低壓電器,2006,(6).
[4]徐黎明.淺析真空開(kāi)關(guān)的合閘彈跳和分閘反彈.高壓電器,2000.
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
