艦艇渦流磁場橫搖磁變模擬檢測方法研究
2014-09-21 05:34:36汪家驊祝小雨
船電技術 2014年1期
汪家驊 , 祝小雨
(1. 91663部隊,山東青島 266012;2. 海軍工程大學電氣工程學院,武漢 430033)
0 引言
隨著水中磁性武器的發展,對艦艇磁場補償程度的要求越來越高。文獻指出,在超低頻段(ULF)[約零至3赫茲],艦艇磁場有四個主要場源,其中艦艇上的所有導電材料(磁性及非磁性的)在地球磁場中搖擺產生的渦流磁場可以大到足以引爆水雷,它是第二重要的艦艇磁性產生源[1]。對于直接在雷區進行作業的獵雷艦艇、掃雷艦艇等非磁性或者低磁材料的艦船,磁性防護要求會高得多,船上盡可能采用非磁性或低磁性材料,這樣,由渦流產生的磁場是極其重要的部分[2]。
艦艇渦流磁場的檢測方法在通常情況下有兩種:機械搖擺測定跟模擬搖擺測定,最早的機械搖擺測定方法是利用人在甲板上的來回奔跑運動,使艦艇產生搖擺,這種方法非常原始,會花費大量的人力物力;后來有在船塢測量站,利用柴油機作動力臂驅使艦船搖擺以及利用絞盤起絞艦船兩舷的木筏迫使艦船產生搖擺等方法,這些原始的方法最后都被廢除,英國的一些研究人員認為用大面積帶電繞組在船下、舷邊移動,空間磁場的擺動將產生和機械搖擺同樣的渦流效應,然而,這種方法不能控制搖擺角度和周期[3]。
由此可知,機械式搖擺檢測方法費時費力、自動化程度低、檢測工程量大、效果不明顯。另一方面,簡單的模擬搖擺檢測法又不能真實反映艦船的搖擺效應,為此,應研究新的模擬搖擺檢測法[3]。
1 空間位置的模擬
如圖1所示,在艦船正直位置,龍骨正下方某測量點A的磁場在艦船穩定時跟艦船發生α角度的搖擺時的測量情況是不一樣的。產生這種差異的原因是:艦船搖擺后,作用在艦船上的磁場變化了,因而其的磁化狀態也隨之改變,加之搖擺后的渦流效應,使得A點測得的磁場值改變。
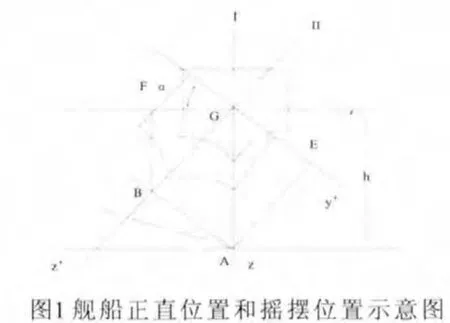
現在,我們再來研究搖擺的模擬規律。設艦船初始平衡狀態如圖1中位置cI,艦船的坐標軸系為Gxyz(圖中, Gx軸與紙面垂直,c未標明,以下均同),船舶沿水線面橫傾 α角后,艦船狀態如圖1中位置Ⅱ,艦船c坐標軸系為Gx’y’z’。如果我們選取 B點,使 B點相對于 Gx’y’z’坐標軸系的坐標等于A點相對于Gxyz坐標軸系的坐標,且B點與A點位于垂直于艦船縱剖面的同一平面Gyz上,則當艦船處于位置I時,A點相對于坐標軸系Gxyz的坐標為:B點相對于坐標軸系Gxyz的坐標軸為:

當艦船處于位置Ⅱ時,A點相對于坐標軸系Gx’y’z’的坐標(假設無縱傾)為:

可得到:

B 點相對于坐標軸系 Gx’y’z’的坐標(假設無縱傾)為:

由式(1)~式(4)得到:
由式(5)和式(6)可得:
1)艦船橫搖α角后的某點B之空間位置可以用艦船正直位置穩定狀態下的A點之c空間位置來模擬;
2)艦船橫搖α角后的某點A之空間位置,可以用艦船正直位置穩定狀態下,以縱剖面為基準時,B點之鏡像對稱點來模擬。
2 地磁場的模擬
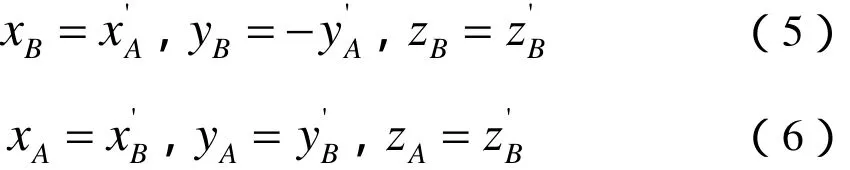
用以下三個坐標軸系確定搖擺艦船在空間的位置:
o1ξ1η1ζ1—固定在空間的坐標軸系;
Gξηζ—固定在艦船的重心而在運動的整個時間內保持和o1ξ1η1ζ1軸系平行的坐標軸系;
Gxyz—固定在艦船重心上的艦船坐標軸系;
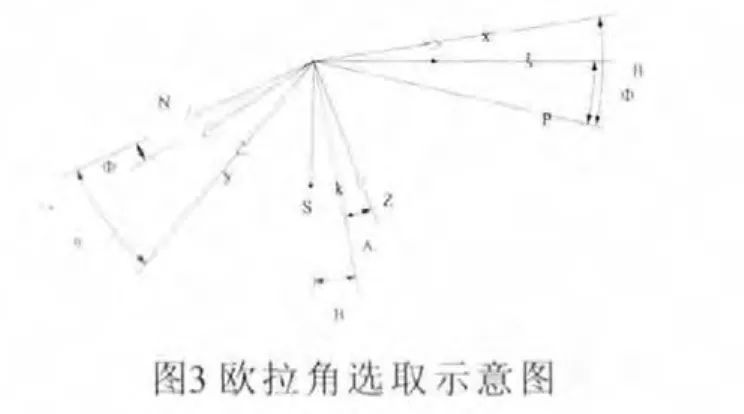
這樣一來,艦船的位置將由它的重心G的三個坐標——ξg、ηg、ζg和 3 個歐拉角α、β、γ來確定。歐拉角的選取如圖3所示。
經過一系列推導可得到:
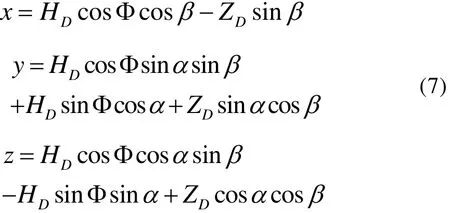
式中:DH—當地地磁水平分量(毫奧)
ZD—當地地磁垂直分量(毫奧)
以上即為在艦船搖擺情況下,艦船坐標系下地磁場各分量的磁變化計算公式。
艦船搖擺時,地球磁化艦船狀態的變化稱為“磁變”,艦船本身空間位置的變化稱為“位變”。
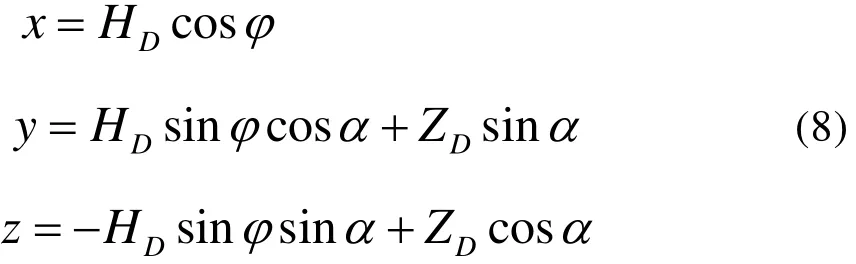
如果只考慮橫搖情況,令β=0,由式(7)得
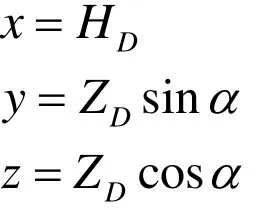
當艦船處于南(北)航向時,φ=0°,180°,則有:

代入式(8),得:
3 橫搖磁變模擬測量
艦船橫搖運動方程為:

設初相0φ=,則
式中:f—橫搖頻率,T—橫搖周期
設最大橫搖角α=45°,下面我們來說明橫搖檢測的模擬方案。
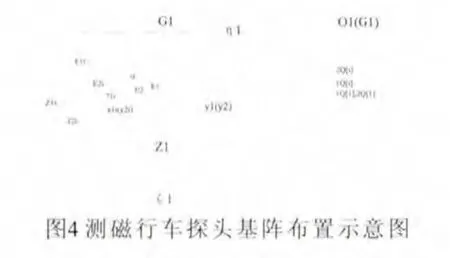
按照前面的分析計算,我們可以設計一測磁行車,圖4示出行車上探頭基陣布置的示意圖。測磁行車上設有13組26個三分量探頭,布置在以o1(G1)為圓心的環形截面上,該環形截面位于 o1η1ζ1平面內。圖 4示出第一組和第二組探頭布置位置,每組探頭由1Q和2Q兩個探頭組成。現以第i組為例說明探頭左邊的方位。
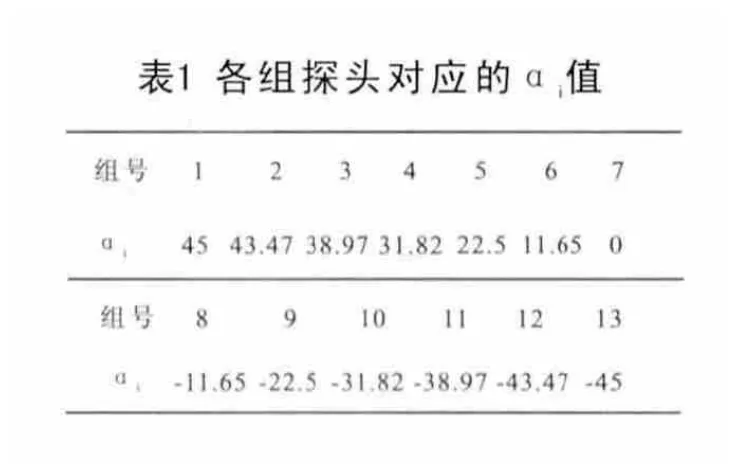
1Q[i]與 2Q[i]的 E1iX1i、E2i X2i軸與o1ξ1軸平行, E1iZ1i軸為通過o1(G1) 點的徑向方向,與軸o1ζ1夾角為αi,各組αi值列出如表1所示。E1i Z1i軸與 E2iZ2i軸平行。E1iY1i( E2iY2i)與 E1i Z1i( E2iZ2i)組成 Yi-Zi平面并與 o1η1ζ1平面重合。
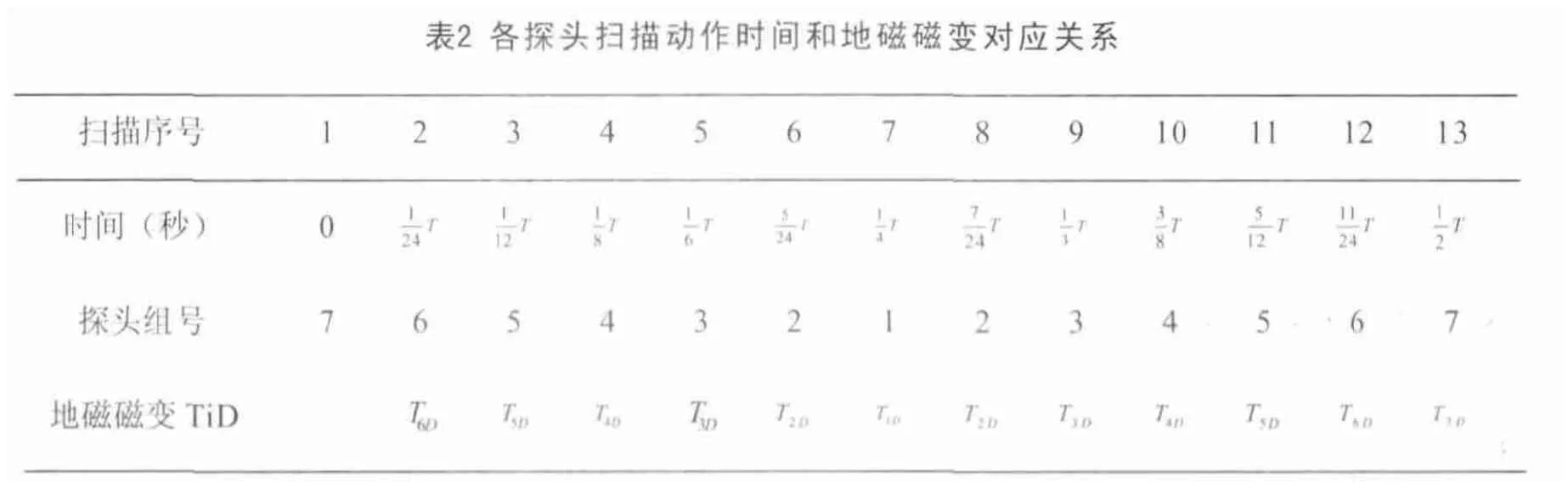
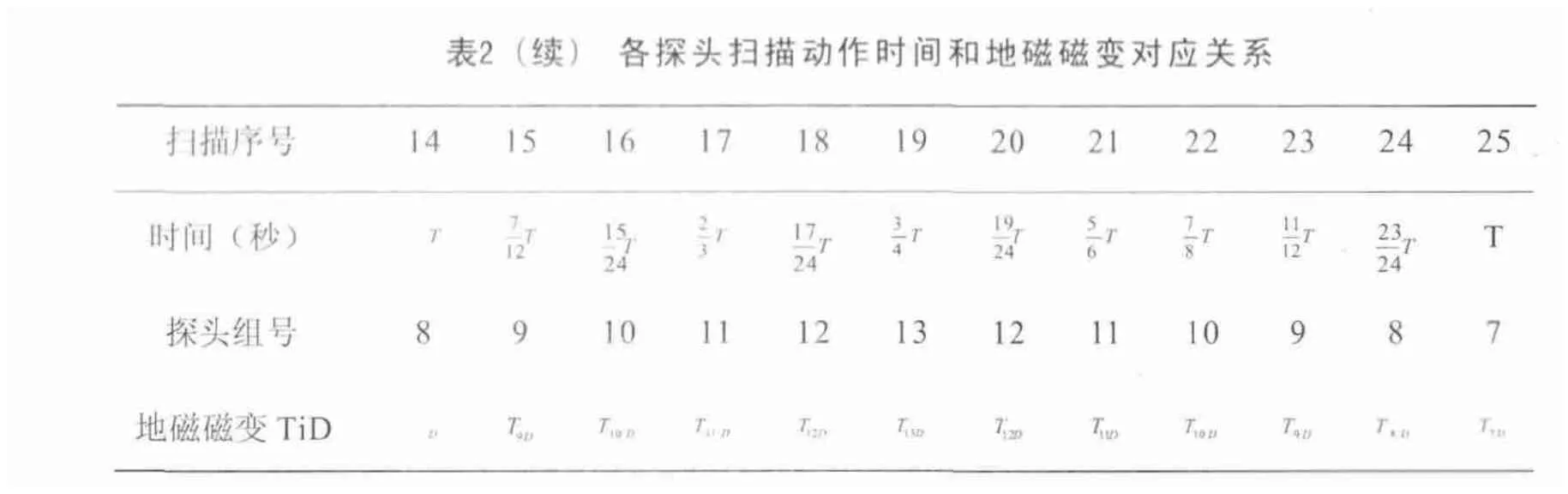
為了模擬磁變狀態,須按公式(8)計算及控制搖擺磁變TiD(包括XiD、YiD、ZiD三個分量),另外還得實地校正各探頭的補償度。同時,為了模擬艦船位變,必須按照時間原則控制各探頭掃描順序。在每一個搖擺周期中,各探頭掃描動作時間和地磁磁變對應關系如表2所示。
如果還要模擬艦船沿O1ξ1軸的航行運動,可按速度原則控制測磁行車沿著 O1ξ1軸方向平行滑動。
這樣通過13組26條測量線,就可獲得靜態及搖擺時(包括艦船運動及不運動兩種情況下的搖擺)艦船下方各測量點X、Y、Z三個方向的磁場變化。借助數據處理裝置分析計算,將其結果記錄、顯示,可以逐點打印表格,也可以連續繪制曲線。
概括橫搖磁變模擬檢測方法的測量步驟是:
1)艦船靜止情況下,測量其下方各點磁場;
2)艦船原地橫搖運動情況下,測量其下方各點及原測量平面各點磁場;
3)艦船行駛無橫搖情況下,測量其下方各點磁場;
4)艦船航行在周期橫搖情況下,測量其下方各點磁場及原測量平面各點磁場。
4 結論
本文在分析艦艇空間位置模擬和地磁場模擬的基礎上,提出了一種艦艇渦流磁場橫搖磁變模擬檢測方法,給出了該方法的模擬方案,包括測磁行車探頭基陣布置、磁變狀態模擬及艦艇位變模擬等,最后給出了橫搖磁變模擬檢測方法的測量步驟。
下一步的工作是在實驗室實現本文提出的艦艇渦流磁場檢測方法。
?
?
?
[1]Holmes J J. Reduction of a ship’s magnetic field signatures [M]. Maryland: Morgan & Claypool Publishers, 2008.
[2]王軍民,朱顯橋.縱搖低磁艦船的渦流磁場計算[J].艦船科學技術,2010,32(3):49-53.
[3]夏春田.艦船搖擺磁場的磁變模擬[J].艦船科學技術,1982,(3):10-28.
[4]呂正石,王錫坤.艦船殼體渦流磁場[J].船舶,1994,(2): 47-57.
猜你喜歡
環球時報(2022-12-30)2022-12-30 15:15:00
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2016年1期)2016-01-11 16:53:24