機床機械手結(jié)構(gòu)設(shè)計與仿真
2014-09-21 06:08:26金林根劉志虎林鵬雄方向華
重慶文理學(xué)院學(xué)報(社會科學(xué)版) 2014年5期
關(guān)鍵詞:設(shè)計
王 雷,金林根,劉志虎,林鵬雄,方向華
(1.安徽工程大學(xué)機械與汽車工程學(xué)院,安徽 蕪湖 241000;2.吳江博眾精工科技有限公司,江蘇 吳江 215028;3.蕪湖博耐爾汽車電氣系統(tǒng)有限公司,安徽 蕪湖 241000)
工業(yè)機械手是在自動化生產(chǎn)過程中使用的一種模仿人體上肢的部分功能,按照預(yù)定要求具有抓取和移動工件功能的自動化裝置,它是在機械化、自動化生產(chǎn)過程中發(fā)展起來的一種新型裝置.實踐證明,工業(yè)機械手可以代替人手的繁重勞動,顯著減輕工人的勞動強度,改善勞動條件,提高勞動生產(chǎn)率和自動化水平.因此,機械手在機械行業(yè)中得到了越來越廣泛的研究和應(yīng)用[1-7].因此,對機械手的相關(guān)結(jié)構(gòu)設(shè)計及控制的研究具有重要的意義.本文設(shè)計的液壓驅(qū)動機床機械手主要與數(shù)控車床(加工中心、數(shù)控銑床等)組合成自動化生產(chǎn)線,實現(xiàn)加工過程(上料、加工、下料)的自動化、無人化.
1 機械手結(jié)構(gòu)方案設(shè)計
1.1 機械手技術(shù)參數(shù)
1)設(shè)計技術(shù)參數(shù)
a)抓重:5 kg;b)自由度數(shù):2;c)工件最大半徑:80 mm;d)手臂夾持工件時的最大長度:529 mm.
2)手臂運動參數(shù)
a)夾緊行程:27 mm,夾緊速度:0.054 m/s;b)伸縮行程:60 mm,伸縮速度:0.06 m/s;c)旋轉(zhuǎn)范圍:0°~90°,旋轉(zhuǎn)速度:45°/s;d)手指夾持范圍:60~80 mm;e)緩沖方式:液壓緩沖;f)驅(qū)動方式:液壓驅(qū)動;g)控制方式:PLC程序控制.
1.2 方案1的確定
采用連桿杠桿式手部,直接夾持部分采用夾鉗式,由液壓缸驅(qū)動T形桿的伸縮使手指張開和閉合,實現(xiàn)放松和夾緊,之后由另一個液壓缸驅(qū)動擺動套筒使整個機械手在豎直平面內(nèi)旋轉(zhuǎn),實現(xiàn)工件的上下料.此機械手具有一個自由度,為工件在豎直平面內(nèi)的旋轉(zhuǎn).方案1的結(jié)構(gòu)如圖1所示.

圖1 機械手方案1
1.3 方案2的確定
此機械手具有兩個自由度,分別為工件的水平伸縮和在豎直平面內(nèi)的旋轉(zhuǎn).它采用的是夾鉗式手部.與方案1一樣,手指由第1個液壓缸(灰色的液壓缸)液壓缸驅(qū)動,使其張開和閉合,實現(xiàn)放松和夾緊.工件的伸縮由第2個液壓缸(紫色的液壓缸)驅(qū)動手臂伸縮實現(xiàn).工件在豎直平面內(nèi)的旋轉(zhuǎn)由第3個液壓缸(黃色的液壓缸)實現(xiàn),黑色的為基座.方案2的結(jié)構(gòu)如圖2所示.
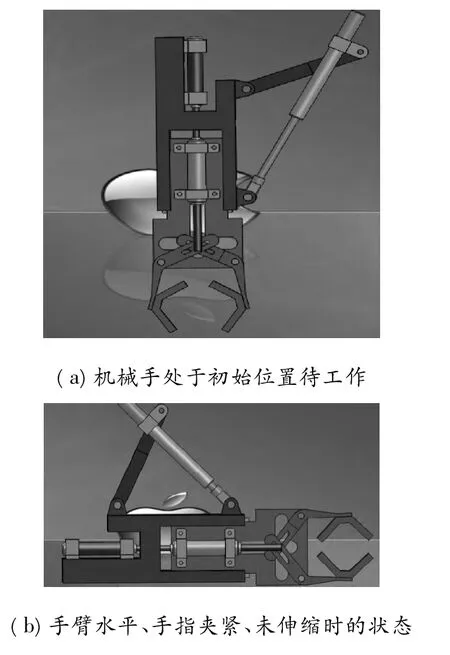
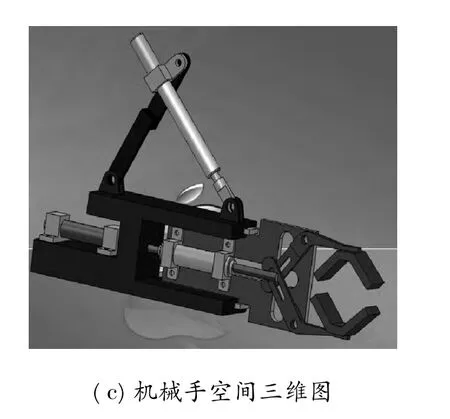
圖2 機械手方案2
1.4 方案的選擇
比較以上兩方案可知方案1存在以下不足:1)結(jié)構(gòu)不緊湊,所需空間大;2)連桿的受力分析困難;3)旋轉(zhuǎn)套筒所受扭矩大,對材料要求高;4)對手臂的剛度要求高;5)效率相對方案2較低.所以方案2為最佳選擇.
2 機械手機械結(jié)構(gòu)設(shè)計
2.1 機械手機械結(jié)構(gòu)的設(shè)計與計算
2.1.1 手部結(jié)構(gòu)設(shè)計
手部是機械手直接抓取和緊握工件的部件,它具有模仿人手的功能,并安裝于機械手手臂的前端.機械手的結(jié)構(gòu)形式不像人手,它的手指沒有形狀,只有自身的運動將工件抓住,因此手部結(jié)構(gòu)形式必須根據(jù)它的使用場合和被夾緊工件的形狀、尺寸、重量、材質(zhì)以及抓取部位的不同而設(shè)計相應(yīng)的結(jié)構(gòu).
本次設(shè)計中所夾持的工件形狀為圓柱形,因此采用夾鉗式手指.它對抓取各種形狀的工件具有較大的適應(yīng)性,可以抓取軸、盤、套類零件,并可自動定心[9].一般情況下,夾鉗式手部多采用兩個手指.手指尾部采用滑槽杠桿式傳力機構(gòu),其主要原因在于,在對手部進行受力分析時較其他形式的傳力機構(gòu)簡單.當(dāng)滑槽內(nèi)的銷釘沿直線運動時,手指可繞轉(zhuǎn)動副回轉(zhuǎn)實現(xiàn)夾緊和放松.手部結(jié)構(gòu)如圖3和圖4所示.
2.1.2 手部夾緊力計算
手部夾緊力FN可按下式進行計算:

(1)式中,k1為安全系數(shù),由機械手的工藝及設(shè)計要求確定,通常取1.2~2.0,這里取1.5;k2為動載系數(shù),主要考慮慣性力的影響,k2=1+a/g.a為運載工件時重力方向的最大上升加速度,g為重力加速度;k3為方位系數(shù),手指豎直,工件水平放置時,取0.9~1.1;G為被夾持工件所受重力.
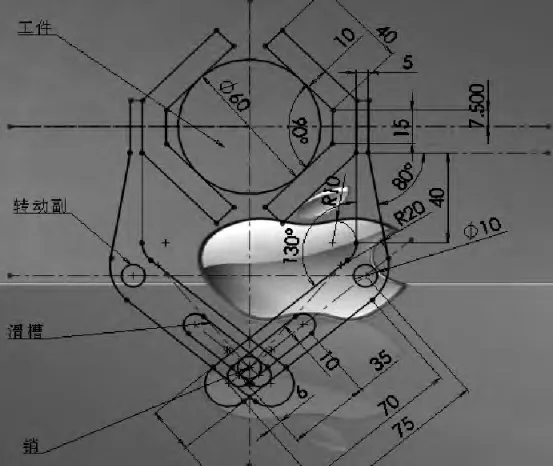
圖3 手部結(jié)構(gòu)平面圖
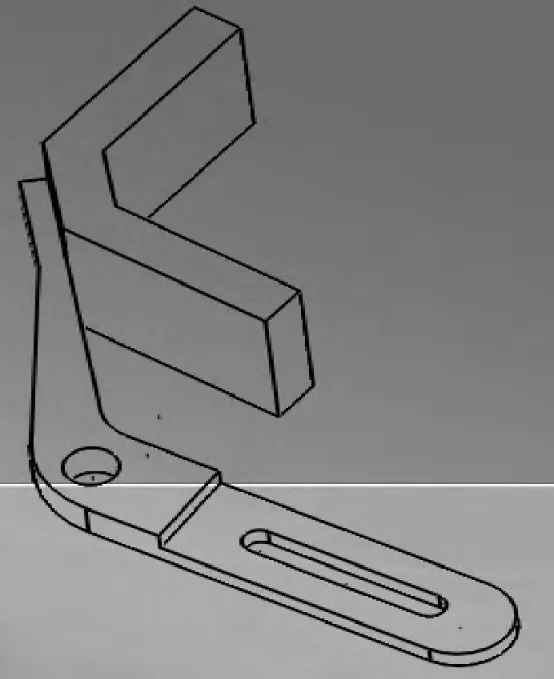
圖4 手部結(jié)構(gòu)三維圖
經(jīng)代入相關(guān)參數(shù)計算得:

2.1.3 手指驅(qū)動力的計算
圖3為手指夾持工件時的示意圖.如圖5所示,先由手指受力分析圖得出手指驅(qū)動力和手指夾緊力之間的關(guān)系.
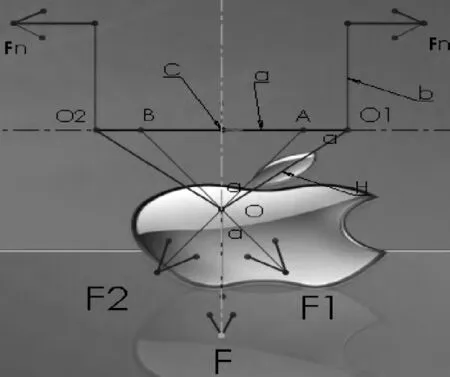
圖5 手指夾持工件時的受力分析圖
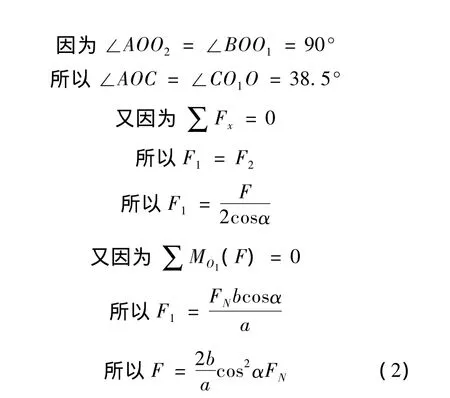
(2)式中,a為手指的回轉(zhuǎn)支點到對稱中心線的距離(mm);α為工件被夾緊時手指的滑槽方向與兩回轉(zhuǎn)支點連線間的夾角.F為第一液壓缸所受的負載.
將FN代入(2)式得:

當(dāng)驅(qū)動力F一定時,α角增大,則握力FN也隨之增加,但α角過大會導(dǎo)致拉桿的行程過大,以及手指滑槽尺寸長度增大,使結(jié)構(gòu)加大,因此建議 α 取30°~ 40°.在本次設(shè)計中,α =38.5°,取值合理.
考慮手爪的機械效率,取η=0.95,所以實際負載為

2.2 機械手臂部的設(shè)計及實現(xiàn)
機械手臂部是機械手的主要握持部件.它的作用是支承手部(包括工件)、滑塊及液壓缸,并帶動它們在空間運動.當(dāng)手臂旋轉(zhuǎn)時改變工件在豎直平面內(nèi)的方位;當(dāng)手臂伸縮時改變工件在豎直平面或水平面內(nèi)的方位.手臂在工作中既直接承受手部、工件及液壓缸的動、靜載荷,而且自身運動又較多,故其受力復(fù)雜.因而,它的結(jié)構(gòu)、工作范圍、靈活性以及抓重大小和定位精度等直接影響機械手的工作性能.
為提高剛度,應(yīng)盡可能縮短臂桿的懸伸長度.在本次設(shè)計中為了增加臂部的剛度,在臂部設(shè)計了兩個吊耳,如圖6所示,由驅(qū)動手臂旋轉(zhuǎn)的液壓缸活塞桿支承.此活塞桿既可驅(qū)動手臂旋轉(zhuǎn),又增加了臂部的剛性,一舉兩得.
為實現(xiàn)工件的伸縮運動,設(shè)置滑塊在手臂內(nèi)滑動,手指安裝在滑塊上的方式,如圖2(b)所示.藍色的是機械手臂,綠色的是滑塊.滑塊由圖2(b)中的紫色液壓缸驅(qū)動再通過活塞桿驅(qū)動使其運動.手臂和滑塊的結(jié)構(gòu)分別如圖7和圖8所示.
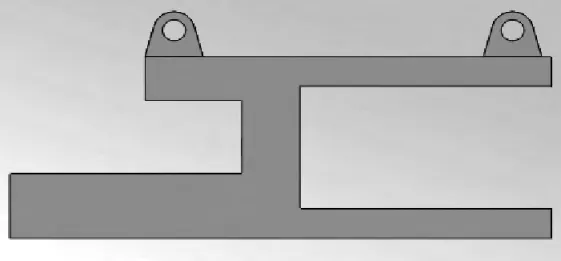
圖6 手臂結(jié)構(gòu)
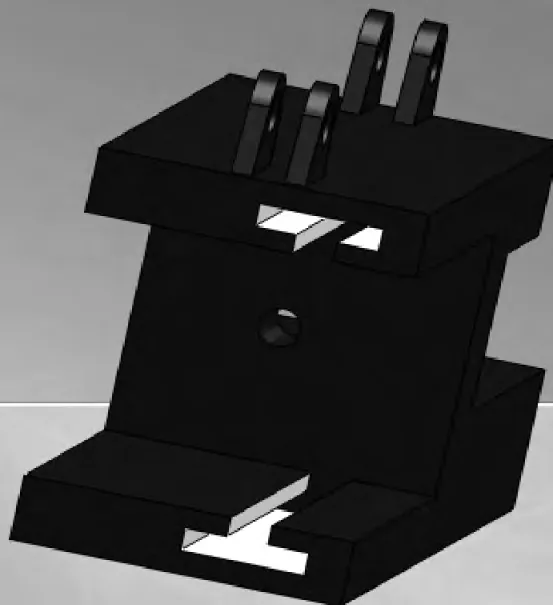
圖7 手臂結(jié)構(gòu)
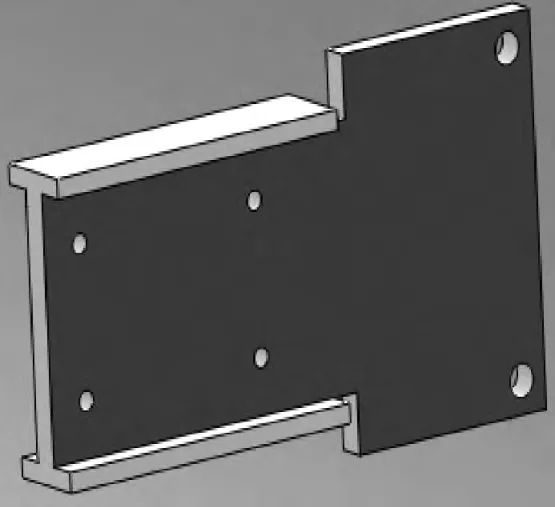
圖8 滑塊結(jié)構(gòu)
3 機械手液壓系統(tǒng)設(shè)計與實現(xiàn)
機械手的伸縮、擺動和手指的夾緊松開均由液壓缸來實現(xiàn).本文設(shè)計的機械手所滿足的功能為:手臂的下降——手指的夾緊——手臂的上升——手臂的上擺——手臂的伸長——手指的放松——手臂的縮回——加工等待——手臂伸長——手 指 夾 緊——手 臂 縮 回——手 臂 下擺——手指放松.其動作流程如圖9所示.
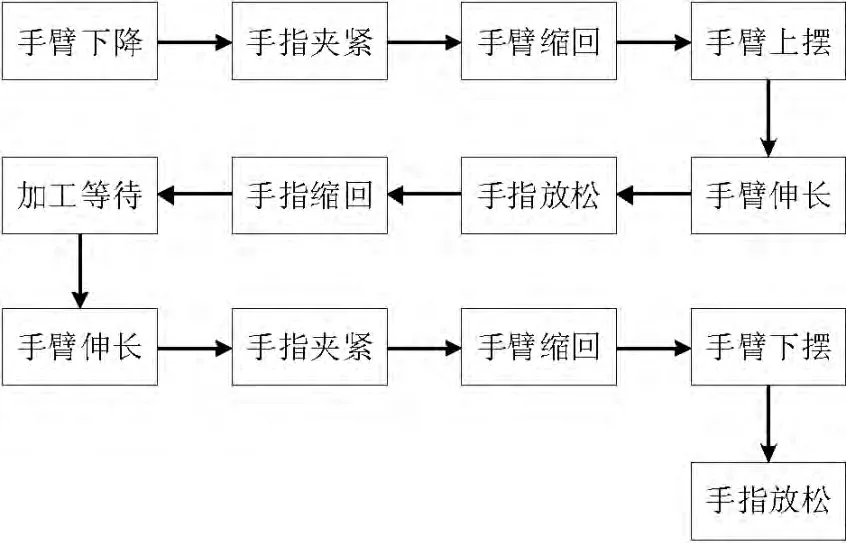
圖9 機械手的動作流程
3.1 液壓缸的設(shè)計
以手指夾緊液壓缸的設(shè)計為例進行計算.
先對液壓缸內(nèi)徑進行計算.要計算液壓缸的內(nèi)徑,則必須先知道液壓缸的驅(qū)動力,及工作壓力p1.
設(shè)液壓缸驅(qū)動力為F驅(qū),液壓缸所受負載F由前面計算得F=140 N.
根據(jù)液壓缸運動時所受負載、背壓、慣性力及密封處的摩擦力等幾個方面的阻力來計算液壓缸的驅(qū)動力F驅(qū).
F驅(qū)的計算公式如下[10]:

(3)式中,F(xiàn)密為總驅(qū)動力的0.03倍;F慣為手指的慣性力很小,可省略;F回為回油壓力,可忽略;F負載=F=140 N.所以有

液壓缸效率的計算:

(4)式中,η為液壓缸總效率;ηm為液壓缸機械效率,一般取0.85~0.95;ηv為液壓缸容積效率,近似等于1;ηd為液壓缸作用力效率,近似等于1.
所以有:

則實際驅(qū)動力:

由F=152 N<5 000 N,所以取工作壓力p=0.8 MP.
液壓缸內(nèi)徑D1計算公式為

(5)式中,d1為活塞桿的直徑,一般取液壓缸內(nèi)徑D1的0.5~1倍.
把上述計算的值代入(5)式并參考相關(guān)資料取整得到:D1=20 mm,d1=10 mm.
另外是夾緊液壓缸行程的確定.夾緊液壓缸的行程即為手指夾緊和放松時的位移.根據(jù)計算結(jié)果并合理選取可得到第一液壓缸活塞行程S1=28 mm,夾緊液壓缸缸筒長度L1=95 mm,及活塞桿長度l1=120 mm.為方便加工制造,取壁厚δ1=2 mm,則液壓缸外徑D1'=D1+2δ1=24 mm.
同理,可以求得手臂伸縮液壓缸的設(shè)計尺寸為:D2=20 mm,活塞桿直徑d2=0.5D2=10 mm,取壁厚δ2=2 mm,則外徑D2'=D2+2δ2=24 mm.伸縮液壓缸缸筒長度L2=100 mm,活塞桿長度l2=143 mm.
手臂擺動液壓缸的設(shè)計尺寸為:D3=32 mm,則活塞桿直徑d=16 mm.取壁厚δ3=2 mm,則外徑 D3'=D3+2δ3=36 mm.擺動缸缸筒長度L3=185 mm,活塞桿長l3=181 mm.并對各個活塞桿的強度進行校核,均滿足要求.
3.2 液壓系統(tǒng)仿真建模
利用FluidSim軟件建立實現(xiàn)本機床機械手動作的液壓系統(tǒng)原理,如圖10所示.

圖10 液壓系統(tǒng)原理圖
當(dāng)機械手處于初始位置時,各液壓缸的狀態(tài)如圖10所示.當(dāng)機械手下降時,3YA接通,伸縮液壓缸活塞桿伸出;當(dāng)手指夾緊時6YA接通,手指夾緊液壓缸回縮;當(dāng)手臂縮回時,4YA接通,伸縮液壓缸活塞桿縮回;當(dāng)手臂向上擺動時,1YA接通,擺動液壓缸的活塞桿縮回;當(dāng)手臂水平伸長時,4YA接通;當(dāng)機械手水平,手指放松時5YA接通;當(dāng)手臂向下擺動時,2YA接通,擺動液壓缸的活塞桿伸出.調(diào)節(jié)系統(tǒng)中的調(diào)速閥或者節(jié)流閥均可以調(diào)節(jié)液壓缸的運動速度,通過液壓系統(tǒng)仿真可以直觀地看出這一結(jié)果,說明設(shè)計結(jié)果的正確性和可行性.
4 結(jié)論
本文設(shè)計了一種液壓驅(qū)動的機床機械手,分析比較了兩種設(shè)計方案并選擇較為合理的一種.在此基礎(chǔ)上,通過詳細分析與計算,完成了該機械手的結(jié)構(gòu)設(shè)計,并利用Solidworks軟件建立了該機床機械手的三維模型.最后,利用FluidSim軟件建立實現(xiàn)所設(shè)計機床機械手動作的液壓系統(tǒng)原理.通過仿真模擬應(yīng)用這種機床自動上料機械手的功能,可以縮短產(chǎn)品的加工時間,提高勞動生產(chǎn)率.因此,這對實際的生產(chǎn)應(yīng)用具有一定的參考價值.
[1]龔青山,常治斌,任愛華,等.立式軸承壓裝機上料機械手設(shè)計[J].湖北工業(yè)大學(xué)學(xué)報,2010,25(4):86-88.
[2]何芹,原政軍,姚龍元.用于方形物件裝卸液壓機械手的設(shè)計[J]. 機床與液壓,2010,38(18):38-40.
[3]付鐵,李金泉,陳懇,等.一種新型高速碼垛機械手的設(shè)計與實現(xiàn)[J].北京理工大學(xué)學(xué)報,2007,27(1):17-20.
[4]李佳寧,易建強,趙冬斌,等.一種全方位移動機械手的體系結(jié)構(gòu)設(shè)計與分析[J].機器人,2004,26(3):272-276.
[5]Yavuz H,Bradshaw A.A new conceptual approach to the design of hybrid control architecture for autonomous mobile robots[J].Journal of Intelligent and Robotics Systems,2002,34(1):1-26.
[6]Hassan H,Simo J,Crespo A.Flexible real-time mobile robot architecture based on behavioral models[J].Engineering Application of Artificial Intelligence,2001,14(5):685-702.
[7]趙碧,巴鵬,徐英鳳.氣動上下料機械手手部結(jié)構(gòu)的設(shè)計與分析[J].沈陽理工大學(xué)學(xué)報,2006,25(6):58-60.
[8]嚴緒東,關(guān)浩.一種仿人機器人頭部的機械結(jié)構(gòu)設(shè)計與動態(tài)仿真[J]. 機電工程,2011,28(9):11-20.
[9]李敬.機械設(shè)計基礎(chǔ)[M].北京:電子工業(yè)出版社,2011.
[10]王益群,殿榮.液壓工程師技術(shù)手冊[M].北京:化學(xué)工業(yè)出版社,2009.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
