具有未知死區(qū)的SⅠSO非仿射非線性系統(tǒng)間接自適應(yīng)模糊控制
2014-09-21 01:38:52周衛(wèi)東廖成毅
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2014年10期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
周衛(wèi)東,廖成毅,鄭 蘭,程 華
(1.哈爾濱工程大學(xué)自動(dòng)化學(xué)院,150001哈爾濱;2.齊齊哈爾市建華機(jī)械有限公司,161006黑龍江 齊齊哈爾)
在工業(yè)過(guò)程中經(jīng)常遇到死區(qū)現(xiàn)象,其非線性特性會(huì)嚴(yán)重影響控制系統(tǒng)的性能,甚至可能導(dǎo)致系統(tǒng)不穩(wěn)定.因此,許多學(xué)者對(duì)具有未知死區(qū)非線性輸入的系統(tǒng)作了大量研究,并取得了一定的成果[1-13].文獻(xiàn)[1-2]針對(duì)一類(lèi)具有死區(qū)環(huán)節(jié)的非線性系統(tǒng)提出構(gòu)造死區(qū)反函數(shù)來(lái)補(bǔ)償死區(qū)環(huán)節(jié)對(duì)系統(tǒng)帶來(lái)的影響,但是該方法中不光滑的反函數(shù)可能會(huì)導(dǎo)致系統(tǒng)發(fā)生抖振現(xiàn)象.Zhou J.等通過(guò)設(shè)計(jì)光滑的死區(qū)反函數(shù)避免了抖振問(wèn)題[3-4].文獻(xiàn)[5-6]分別針對(duì)運(yùn)動(dòng)控制系統(tǒng)和直流電機(jī)系統(tǒng)提出了模糊設(shè)計(jì)方法,即根據(jù)專家經(jīng)驗(yàn)設(shè)計(jì)基于模糊邏輯系統(tǒng)的死區(qū)補(bǔ)償器,利用模糊方法構(gòu)造控制器,然而該方案會(huì)過(guò)度地依賴于專家經(jīng)驗(yàn),當(dāng)找不到合適的描述死區(qū)非線性特性的模糊規(guī)則時(shí),不能利用這種方法處理死區(qū)問(wèn)題.在文獻(xiàn)[7-9,11-13]中,死區(qū)被分解為一個(gè)線性項(xiàng)和一個(gè)有界的擾動(dòng)類(lèi)似項(xiàng),然后利用魯棒控制技術(shù)設(shè)計(jì)控制器,取得了理想的控制效果.上述研究均是針對(duì)仿射非線性系統(tǒng),而大多數(shù)實(shí)際系統(tǒng)如飛控系統(tǒng)、化學(xué)反應(yīng)控制系統(tǒng)等都是非仿射系統(tǒng),近年來(lái)非仿射非線性系統(tǒng)的研究取得了很多成果[14-17],遺憾的是針對(duì)非仿射非線性系統(tǒng)的研究,幾乎沒(méi)有人考慮含有死區(qū)輸入的情況.
本文針對(duì)一類(lèi)具有未知死區(qū)輸入環(huán)節(jié)的SISO非仿射非線性系統(tǒng),給出了一種間接自適應(yīng)模糊控制方法.當(dāng)系統(tǒng)狀態(tài)可測(cè)時(shí),采用模糊邏輯系統(tǒng)逼近系統(tǒng)中的非線性函數(shù),構(gòu)造了間接自適應(yīng)模糊控制器.當(dāng)系統(tǒng)狀態(tài)不可測(cè)時(shí),設(shè)計(jì)觀測(cè)器估計(jì)跟蹤誤差,基于估計(jì)得到的狀態(tài)設(shè)計(jì)間接自適應(yīng)模糊輸出反饋控制器.最后利用Lyapunov穩(wěn)定性定理證明了跟蹤誤差收斂到零的某一鄰域,同時(shí)保證閉環(huán)系統(tǒng)所有信號(hào)有界.
1 問(wèn)題描述
考慮如下一類(lèi)SISO非仿射系統(tǒng)
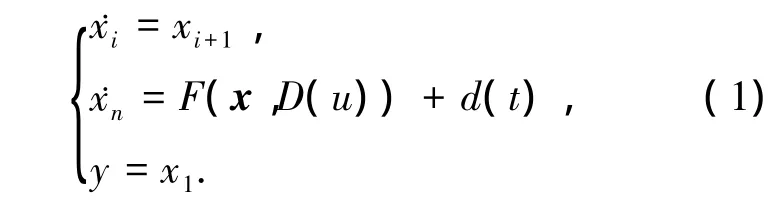
其中:u∈R為系統(tǒng)輸入量,y∈R為系統(tǒng)輸出量,x=[x1,…,xn]T∈Rn為系統(tǒng)的狀態(tài)向量,d(t)為外界干擾且存在常數(shù) d 滿足 |d(t)|≤ d,F(xiàn)(x,D(u))為光滑的未知函數(shù),D(u)為參數(shù)未知的死區(qū)輸入.
控制目的:設(shè)計(jì)控制器使得系統(tǒng)輸出y跟蹤指定期望軌跡yd,同時(shí)閉環(huán)系統(tǒng)所有信號(hào)均有界.
假設(shè)1 對(duì)于任意x∈Ωx?Rn,存在大于零的常數(shù)g使得函數(shù),滿足條件g<g(x)≤成立,其中Ωx為系統(tǒng)的可控域.
假設(shè)2 yd(t)及其對(duì)時(shí)間導(dǎo)數(shù)y(i)d(t)為有界的光滑函數(shù),i=1,2,…,n.
假設(shè)3 對(duì)于任意x∈Ωx?Rn存在常數(shù)gr使得|·g(x)|≤gr成立.
輸入為u輸出為D(u)的死區(qū)模型描為
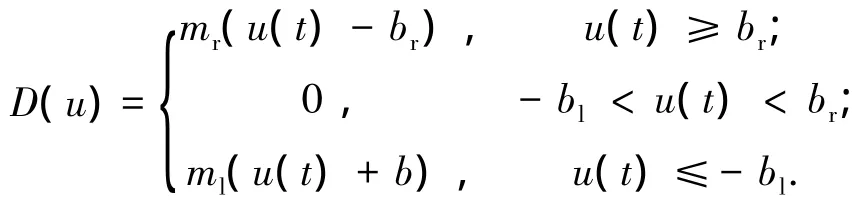
死區(qū)模型滿足條件:1)死區(qū)輸出D(u)不可測(cè);2)死區(qū)參數(shù)未知,滿足0≤br≤br,0≤bl≤bl,0<ml≤ml,0<mr≤mr.
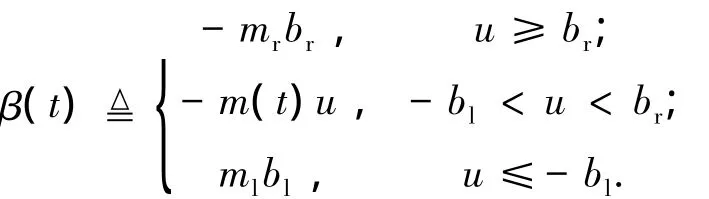
將未知死區(qū)轉(zhuǎn)化為

2 自適應(yīng)模糊控制器設(shè)計(jì)
首先利用中值定理將非仿射非線性形式轉(zhuǎn)化為仿射非線性形式,有

其中:f(x)=F(x,0),λ ∈[0,D(u)],

結(jié)合式(2),系統(tǒng)(1)可轉(zhuǎn)換為

其中:d0=g(x)β(t)+d(t),則存在大于零的常數(shù)0使得 |d0|≤0.
針對(duì)經(jīng)轉(zhuǎn)化得到的仿射非線性系統(tǒng),分系統(tǒng)狀態(tài)可測(cè)與不可測(cè)兩種情況進(jìn)行分析.
2.1 系統(tǒng)狀態(tài)可測(cè)
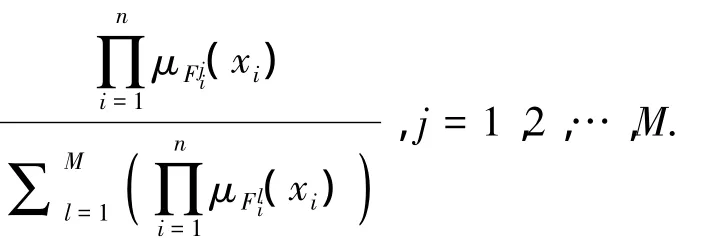
根據(jù)模糊邏輯系統(tǒng)的萬(wàn)能逼近特性[18],存在最優(yōu)逼近參數(shù)分別滿足
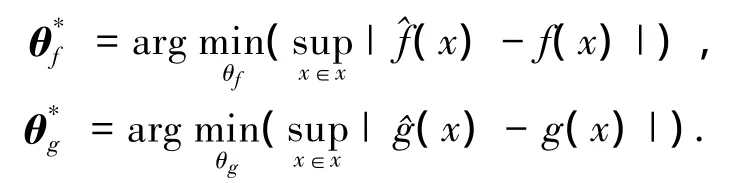
估計(jì)誤差為

定義最優(yōu)逼近誤差為

定義跟蹤誤差e=yd-y,則誤差向量e=[e,,…,e(n-1)]T.
由式(3)有系統(tǒng)跟蹤誤差方程為

式中:B=[0…01]T,
選擇向量 K= [kn,kn-1,…,k1]T使得 sn+k1sn-1+k2sn-2+kn為Hurwitz多項(xiàng)式.因此A1=A-BKT為穩(wěn)定的矩陣,即給定一個(gè)正定對(duì)稱矩陣P,存在正定矩陣Q滿足Lyapunov方程

定理1 對(duì)于系統(tǒng)(1),采用如下控制律與自適應(yīng)律,可以使得系統(tǒng)輸出跟蹤給定期望信號(hào),同時(shí)保證閉環(huán)系統(tǒng)所有信號(hào)均有界.
控制律為
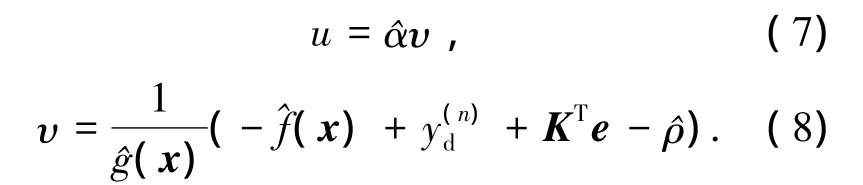
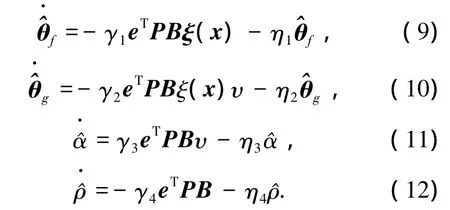
自適應(yīng)律為
其三,巡檢工作不到位。在城市燃?xì)夤艿劳度脒\(yùn)行之后,城市燃?xì)夤艿老嚓P(guān)單位承擔(dān)著管道運(yùn)行維護(hù)的責(zé)任,它們需要組織人員對(duì)管道日常運(yùn)行進(jìn)行巡檢,及時(shí)發(fā)現(xiàn)并排除一些潛在的安全隱患或是突發(fā)問(wèn)題,這樣可以最大程度的避免燃?xì)庑孤妒鹿实陌l(fā)生。然而在實(shí)際工作中,管道運(yùn)行巡檢工作不到位的情況十分常見(jiàn),這也為燃?xì)庑孤堵裣铝穗[患。
證明 取如下Lyapunov候選函數(shù)


對(duì)V求時(shí)間的導(dǎo)數(shù)并結(jié)合(5)、(6)可得
將控制律式(7)、(8)以及自適應(yīng)律式(9)~(12)代入式(14)整理可得
根據(jù)假設(shè)1和假設(shè)3,利用不等式性質(zhì)整理式(15)有
其中:μ0=,選取 η3使得 η3->0.
由式(16)可得

2.2 系統(tǒng)狀態(tài)不可測(cè)
在實(shí)際工程中,通常只有系統(tǒng)輸出可測(cè),而系統(tǒng)狀態(tài)通常是不可測(cè)量的,即y可測(cè),=[x2,…,xn]T不可測(cè).此時(shí)只能利用狀態(tài)的估計(jì)=[1,…,n]T設(shè)計(jì)間接自適應(yīng)模糊控制器.
跟蹤誤差向量為e=[e,,…,e(n-1)]T,定義
參數(shù)誤差為

定義f(x)和g(x)的最優(yōu)逼近誤差為
由式(4)可得系統(tǒng)跟蹤誤差方程為

設(shè)計(jì)誤差觀測(cè)器為

式中:C=[1,0,…,0]T為反饋增益為觀測(cè)器增益,選擇K0、Kc分別使A-、A-KcCT為穩(wěn)定矩陣.
假設(shè)4 正定矩陣P1和P2分別滿足方程
由式(18)、(19)可得

定理2 對(duì)于系統(tǒng)(1),當(dāng)系統(tǒng)狀態(tài)不可測(cè)時(shí),采用如下控制律和自適應(yīng)律,可以使得系統(tǒng)輸出跟蹤給定期望信號(hào),同時(shí)保證閉環(huán)系統(tǒng)所有信號(hào)均有界.
控制律


自適應(yīng)律
構(gòu)造如下Lyapunov候選函數(shù)
求V1關(guān)于時(shí)間的導(dǎo)數(shù)
將式(20)、(21)代入式(31)有
整理可得

假設(shè)存在常數(shù) M、N、?分別滿足不等式|u|≤M,|υ|≤N,‖θg‖2≤?.將自適應(yīng)律式(25)~(28)代入式(32)整理有
對(duì)式(33)兩端求積分有

3 仿真結(jié)果
考慮如下非仿射非線性系統(tǒng)
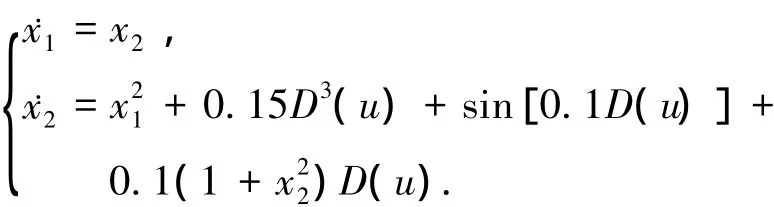
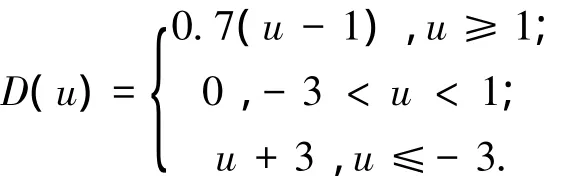
仿真目的是驗(yàn)證所設(shè)計(jì)控制器能使系統(tǒng)的輸出y跟蹤期望軌跡yd=sin(t).仿真實(shí)驗(yàn)將分系統(tǒng)狀態(tài)可測(cè)與不可測(cè)兩種情況進(jìn)行.其中死區(qū)D(u)定義為
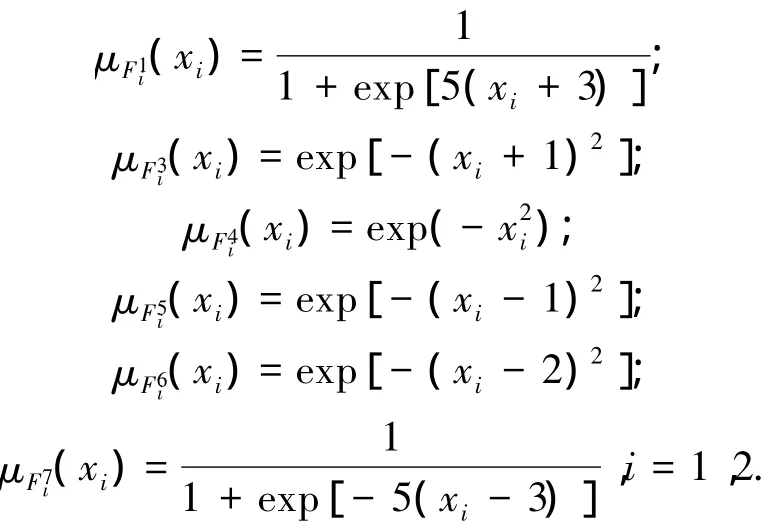
模糊隸屬度函數(shù)選取分別為
狀態(tài)可測(cè)時(shí),參數(shù)取值:γ1=0.01、γ2=0.01、γ3=0.01、γ4=0.01、η1=0.08、η2=0.08、η3=0.08、η4=0.08、K=[2510]T、P=.仿真過(guò)程中初值設(shè)定(0)=0.1(0)= [0.1…0.1]1×49、x1(0)=1、=[0.1…0.1]1×49、x2(0)=0.仿真時(shí)間為30 s,仿真結(jié)果如圖1~3所示.
狀態(tài)不可測(cè)時(shí),參數(shù)取值:γ21=0.01、γ22=0.01、γ23=0.01、γ24=0.01、η21=0.001、η22=0.001、η23=0.001、η24=0.001、K0=[104]T、Kc=[45]T、P1=.仿真初值設(shè)定:[0.1…0.1]1×49(0)=[10]T.仿真時(shí)間取為30 s,結(jié)果如圖4~6所示.
由圖1和圖4可以觀察到系統(tǒng)輸出跟蹤期望信號(hào)的軌跡,結(jié)合跟蹤誤差圖2和圖5,可以得出結(jié)論,利用本文所設(shè)計(jì)的控制器,可以使得系統(tǒng)完成跟蹤任務(wù),即跟蹤誤差收斂于零的某一鄰域.圖3和圖6則分別給出了兩種情況下系統(tǒng)控制輸入的軌跡曲線.經(jīng)上述分析,本文給出的控制器能夠使得系統(tǒng)輸出跟蹤給定軌跡,并同時(shí)保證了跟蹤誤差收斂以及控制輸入有界.
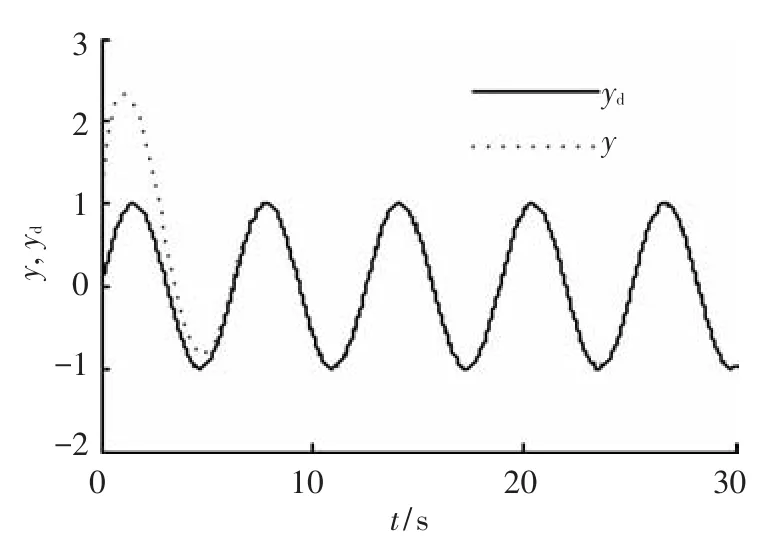
圖1 狀態(tài)可測(cè)時(shí)期望輸出與實(shí)際跟蹤曲線
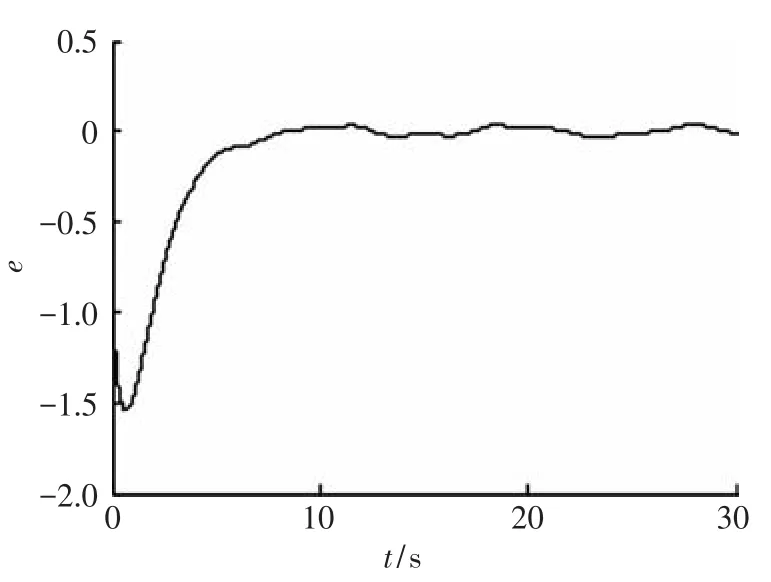
圖2 狀態(tài)可測(cè)時(shí)跟蹤誤差曲線
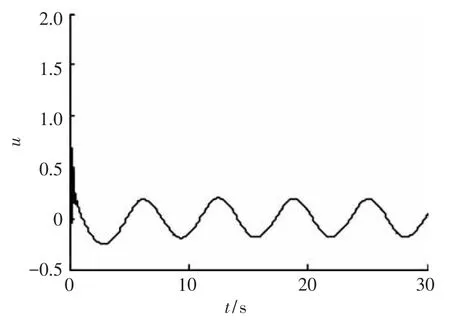
圖3 狀態(tài)可測(cè)時(shí)系統(tǒng)控制輸入曲線
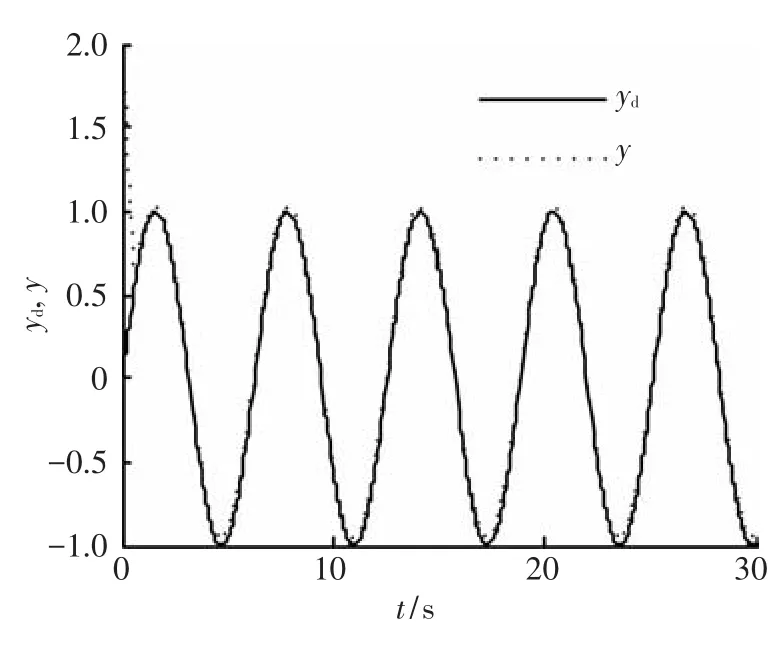
圖4 狀態(tài)不可測(cè)時(shí)期望輸出與實(shí)際跟蹤曲線
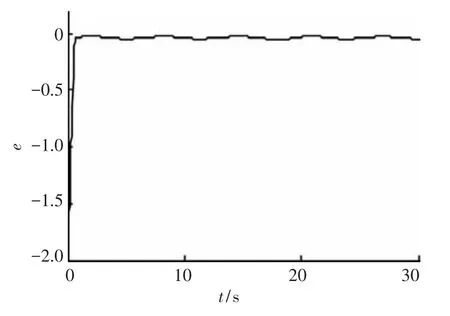
圖5 狀態(tài)不可測(cè)時(shí)跟蹤誤差曲線
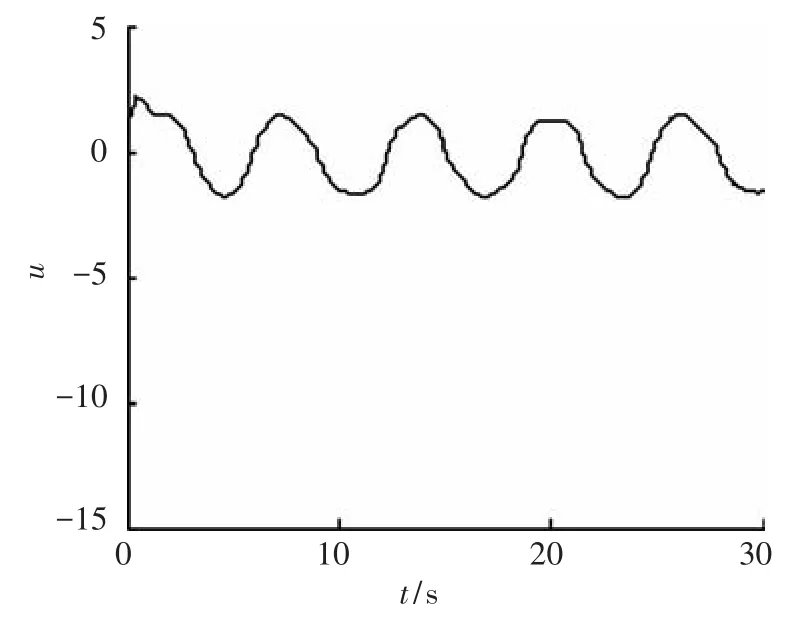
圖6 狀態(tài)不可測(cè)時(shí)系統(tǒng)控制輸入曲線
5 結(jié) 論
1)研究了一類(lèi)含有未知死區(qū)輸入環(huán)節(jié)的SISO非仿射非線性系統(tǒng)控制器設(shè)計(jì)問(wèn)題,給出了在系統(tǒng)狀態(tài)可測(cè)與不可測(cè)兩種情況下的控制器設(shè)計(jì)方案.
2)通過(guò)Lyapunov定理證明了具有未知死區(qū)的SISO非仿射非線性閉環(huán)系統(tǒng)的穩(wěn)定性,跟蹤誤差收斂,同時(shí)保證了所有系統(tǒng)均有界.
[1]CHO H,BAI E.Convergence results for an adaptive dead zone inverse [J].Int J Adapt Control Signal Processing,1998,12(5):451-466.
[2]TAWARE A,TAO Gang,TEOLIS C.Design and analysis of a hybrid control scheme for sandwich nonsmooth nonlinear systems[J].IEEE Trans Autom Control,2002,47(1):145-150.
[3]ZHOU Jing,WEN Changyun,ZHANG Ying.Adaptive output control of nonlinear systems with uncertain deadzone nonlinearity [J].IEEE Trans Autom Control,2006,51(3):504-511.
[4]ZHOU Jing,SHEN X Z.Robust adaptive control of nonlinear uncertain plants with unknown dead-zone[J].IET Control Theory Appl,2007,1(1):25-32.
[5]LEWIS F L,TIM W K,WANG L Z,et al.Dead-zone compensation in motion control systems using adaptive fuzzy logic control[J].IEEE Trans Contr Syst Technol,1999,7(6):731-742.
[6]JANG J O.A dead-zone compensator of a DC motor system using fuzzy logic control[J].IEEE Trans Man,Systems and Cybernetics:Applications and Reviews,2001,31(1):42-48.
[7]WANG Xingsong,SU Chunyi,HONG H.Robust adaptive control of a class of linear systems with unknown dead-zone [J].Automatica,2004,40(3):407-413.
[8]張?zhí)炱剑釗P(yáng),梅建東.帶有未知死區(qū)模型的魯棒自適應(yīng)模糊控制[J].控制與決策,2006,21(4):367-370.
[9]IBRIR S,XIE Wenfang,SU Chunyi.Adaptive tracking of nonlinear systems with non-symmetric dead-zone input[J].Automatica,2007,43(3):522-530.
[10]沈啟坤,張?zhí)炱?具有未知非線性死區(qū)的自適應(yīng)模糊控制[J].控制與決策,2007,22(6):689-692.
[11]HUA Changchun,WANG Qingguo,GUAN Xinping.Adaptive tracking controller design of nonlinear systems with time-delays and unknown dead-zone input[J].IEEE Trans Autom Control,2008,53(7):1753-1759.
[12]ADLOO H,NOROOZI N,KARIMAGHA P.Observer based model reference adaptive control for unknown time-delay chaotic systems with input nonlinearity [J].Nonlinear Dynamic,2012,67:1337-1356.
[13]TONG Shaocheng,LI Yongming.Adaptive fuzzy output feedback control of MIMO nonlinear systems with unknown dead-zone inputs[J].IEEE Trans Fuzzy Syst,2013,21(1):134-146.
[14]LABIOD S,GUERRA T M.Adaptive fuzzy control of a class of SISO nonaffine nonlinear systems[J].Fuzzy Sets Syst,2007,158(10):1126-1137.
[15]WEN Jie,JIANG Changsheng.Adaptive fuzzy controller for a class of strict-feedback nonaffine nonlinear systems[J].Journal of Systems Engineering and Electronics,2011,22(6):967-974.
[16]MAO Zhizhong,XIAO Xiaoshi.Decentralized adaptive tracking control of nonaffine nonlinear large-scale systems with time-delays [J].Inf Sci,2011,181(23):5291-5303.
[17]BOULKROUNE A,MSAAD M,F(xiàn)ARZA M.Adaptive fuzzy tracking control for a class of MIMO nonaffine uncertain systems [J].Neurocomputing,2012,93:48-55.
[18]WANG Lixin.A course in fuzzy systems and control[M].Englewood Cliffs,NJ:Prentice Hall,1997.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
