深海漂浮式風力機研究及最新進展
2014-09-25 03:44:28高偉,李春,葉舟
中國工程科學 2014年2期
關鍵詞:研究
高 偉,李 春,葉 舟
(1.上海理工大學能源與動力工程學院,上海 200093;2.大唐集團華創風能有限公司技術研究院,山東青島 266000)
深海漂浮式風力機研究及最新進展
高 偉1,2,李 春1,葉 舟1
(1.上海理工大學能源與動力工程學院,上海 200093;2.大唐集團華創風能有限公司技術研究院,山東青島 266000)
海上風電場建設是風力發電技術的最新方向,隨著近海風場深入開發,風場建設從近海到遠海是其未來必然的發展趨勢,隨著海水深度的增加,風力機必須采用漂浮式平臺作為基礎。本文較為系統地考察了國外深海漂浮式風力機的早期歷史、現狀及最新研究進展,其中著重介紹了其理論分析、系統仿真和水動力學實驗方面的研究,并進一步指出現有研究的種種不足,據此提出新的研究方向和設想。
深海;漂浮式風力機;系統仿真;水動力實驗
1 前言
海上風電場建設是風力發電技術的最新方向,但按照目前近海風電場所采用的各種固定于海底的貫穿樁結構的傳統方法,整個風力機基礎的成本將隨著海水深度增加而急劇上升,使深海風電場建設在經濟上變得不可行,而將風力機安裝在漂浮式平臺是解決這一問題的有效途徑。因此,未來風電場建設的必然趨勢是“由陸向海、由淺到深、由固定基礎向漂浮式平臺”[1],如圖1所示。
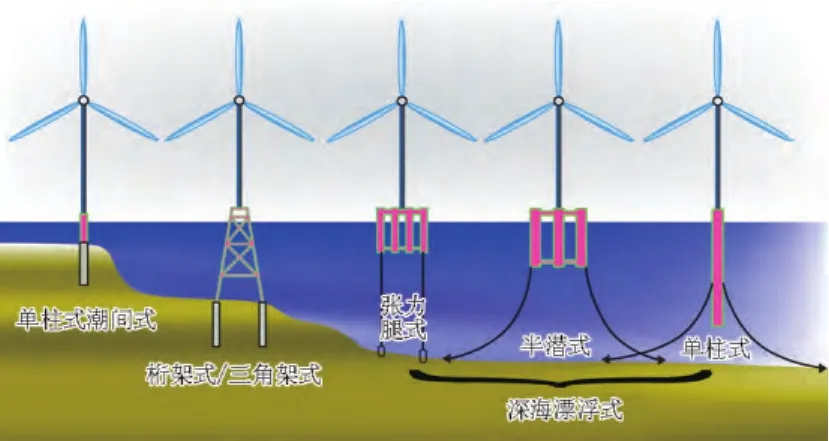
圖1 海上風力機的發展趨勢Fig.1 The trends of the offshore wind turbine
同時,多兆瓦級深海漂浮式風力機是一種具有戰略意義的新能源形式,對于充分利用我國廣闊的海洋國土,緩解我國的能源分布格局與能源需求存在著巨大矛盾具有重大的意義。
2 漂浮式風力機早期研究歷史
美國馬薩諸塞大學安默斯特分校的Heronemus在1972年最早提出海上大型漂浮式風力機概念[2]:將很多小型風力機集合安裝在一巨大的浮動平臺上(如圖2所示)。20世紀80年代,美國FloWind公司與美國桑迪亞國家實驗室合作分別開發了100 kW和300 kW漂浮式垂直軸風力機,在美國加州兩大型風電場生產、安裝、運行了500多臺低成本的漂浮式垂直軸風力機,累計達170 MW[3],但因該項目在美國加州政府1986年取消對風電補貼后基本陷入停滯。
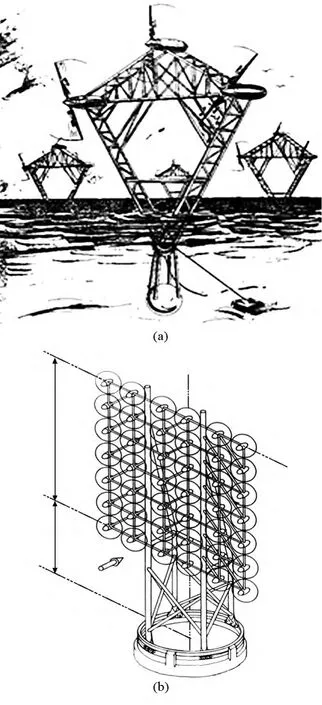
圖2 Heronemus海上大型漂浮式的風力機概念Fig.2 Heronemus’s conceptual design of large-scale offshore floating wind turbine
隨著大型現代水平軸風力機技術與工程實施經驗的逐步成熟,1988年,英國南安普敦大學的Satchwell在英國皇家航空學會論壇海上風電大型項目研討會上指出,隨著未來海上風力發電發展,必然會采取漂浮式平臺安裝技術[4]。1991年英國貿工部率先資助了大型漂浮式水平軸風力機的項目研究[5],克威爾內油氣公司的Tong從技術和經濟性兩方面考察獨立的海洋工程平臺安裝大型水平軸風力機以及在英國北海地區布置9臺風力機組成的海上風電場的可行性[6]。英國斯特拉思克萊德大學的Barltrop則設想在不同的鋸齒型浮體平臺結構上安裝數個風力機(見圖3a),構成所謂的多單元海上漂浮式風電場,研究了風力機不同布置方式對氣動性能的可能影響[7];意大利學者們則提出了在水深30~100 m區域選擇使用環形漂浮體結構Eolomar平臺(見圖3b),并在該漂浮平臺上安裝數臺風力機[8],由于實施成本高昂,以上方案僅停留在項目設想和概念設計階段。
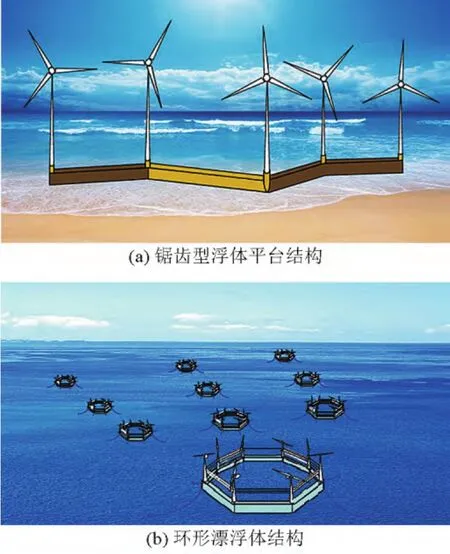
圖3 多單元海上漂浮式風電場Fig.3 Multi-unit floating offshore wind farm
3 漂浮式風力機研究現狀
最近十多年比較有代表性的漂浮式風力機概念設計詳見文獻[9]。由此可知,目前漂浮式風力機研究主要集中在歐洲北海附近國家、美國和日本,我國此方面的理論研究尚屬起步階段。
3.1 漂浮式風力機在歐洲的研究
1998年,英國倫敦大學學院的Halfpenny開始從系統整機建模和水動力學角度研究海上風力機,并借鑒海洋工程的頻域分析方法,對淺海和漂浮式風力機水動力學特性進行分析,可以看做是現代漂浮式風力機理論研究的先聲[10]。2000年,Henderson延續前者的研究工作,指出單一的漂浮體結構安裝風力機的方法,在減少平臺和系泊系統運動響應有較大的優勢[11],此后的漂浮式風力機基本上都傾向于采用獨立平臺設計。2006年,英國斯特拉思克萊德大學的Vijfhuizen進一步設計了一個基于駁船平臺的5 MW的風力發電機系統[12],其特點是可以結合其他形式海洋能源進行發電。
2002年,荷蘭能源研究中心、荷蘭海洋工程研究院和荷蘭代爾夫特大學等機構共同發起Drijvende漂浮式風力機研究項目[13],即荷蘭三角架平臺漂浮式風力機概念設計項目,利用QUAESTOR知識庫系統,采用基于頻域算法的響應振幅算子(RAOs)作為平臺設計分析的主要參數,建立平臺運動模式的六自由度剛體振幅標準偏差模型。后來很多研究者延續這個概念設計,或者采用偏心式布置風力機,直接將風力的塔架作為平臺支架的一部分,或采用更多浮柱增加平臺穩定性,如Blue-H漂浮式風力機就是采用6個柱子的漂浮式平臺[14]。作為該項目工作的延續,文獻[15]通過計算葉片的空氣動力荷載和慣性荷載,研究了漂浮式平臺結構運動對整個風力機系統的影響,發展了計算漂浮式平臺結構運動引起的疲勞載荷和極端荷載的分析方法。
2005年,丹麥技術大學的Chen Zhenzhe對美國可再生能源國家實驗室(NREL)張力腿(TLP,tension leg platform)、荷蘭三角架平臺和日本浮柱(spar)3種深海漂浮式平臺進行了平臺結構在風力機和波浪荷載作用下動力響應特性對比研究[16],其結構動力學模型采用二維集中質量模型方法,氣動模型采用簡單的動量葉素理論,水動力模型在分別采用規則線性波和“北海聯合海浪計劃”不規則浪譜方法。研究表明:在不規則波環境下,平臺結構的最大響應是由風力機氣動荷載的基頻分量引起的;由于漂浮式平臺結構的運動,作用在風力機上的風速波動將引起輸出功率的波動,此為海上風電機組浮式基礎結構設計的最大挑戰[17]。Psichogios在后續的研究中,主要利用水池實驗研究了TLP平臺的水動力特性,研究發現:模型可承受5.5 m/s穩態風和1.4~3.8 m/s陣風不至傾覆,傾覆角與水深高度相關,原因是由于張力腿的剛度隨著深度變化而變化;風力機所受的氣動力與理論計算值相近,但發電功率遠小于理論計算值,可能由于傳動軸的摩擦力偏大造成[18]。在此項研究基礎上,Ramachandran等進一步研究TLP平臺耦合風浪載荷的三維響應特性[19]。Akin則利用丹麥水利研究所開發的MIKE 21 SW軟件,對布置在北海德國灣深水海域海上風力機極端風況與波浪載荷進行研究,并將研究結果與HAWC 2軟件計算結果進行比較,研究結果表明:在穩態風和規則波條件下,兩者計算值可以控制在20%以內,當采用湍流風和不規則波時,計算結果差異較大,原因在于軟件建模的自由度有很大差別[20],這一點也說明在深海漂浮式風力機設計中,評價不同的設計工具需要有更為一致的標準。
2006年,挪威國家石油公司的Nielsen、Hanson和Skaare為配合HyWind項目,采用SIMO/RIFLEX/HAWC2耦合分析軟件包對深海漂浮式風力機進行整機動力學研究,其中SIMO為水動力計算模塊,RIFLEX為結構計算模塊,HAWC2為風力機氣動計算模塊[21],后續研究證實以上軟件包的計算結果與水池實際測量值基本吻合,有足夠的可信性[22]。
2011年,挪威科技大學的Linde則利用SIMO軟件參與IEA Wind Annex XXIII(國際能源署風能第23任務組)第二子任務組的海上風力機設計程序比較(OC3,Offshore Code Comparison Collaboratio)項目,研究了基準的5 MW Spar平臺漂浮式風力機的水動力特性,并與水池實驗值進行比較,發現兩者有比較大的差別[23]。類似的,Solberg則利用HydroD/DeepC/TDHMILL3d組合程序參與OC3項目的研究,其中HydroD水動力計算模塊,用于計算平臺的水動力系數,提供給DeepC程序;TDHMILL3d為一動態鏈接庫程序,主要將風力機的氣動計算載荷傳遞給DeepC程序,DeepC為耦合平臺和系泊系統的時域分析軟件。研究顯示:在160 m和320 m兩種水深中,兩種風力機平臺的各自的水動力特性并無明顯變化,但在給定的風況條件下,半潛式平臺的縱搖和縱蕩運動較大,而Spar平臺則有劇烈的艏搖運動[24]。Karimirad 利用 SIMO(DeepC)/RIFLEX/HAWC2深入研究了兩種系泊方式的Spar平臺漂浮式風力機,研究結果表明:采用張力式系泊浮柱平臺比懸鏈式系泊浮柱平臺擁有更好的水動力性能,而且可以降低建造成本[25]。
2009年,德國斯圖加特大學的Matha在NREL和國際能源署的資助下利用美國風能技術中心的AeroDyn/HydroDyn/FAST全耦合分析軟件研究了麻省理工學院(MIT)/NREL張力腿式漂浮式風力機動力學特性,并與一般TLP、ITI駁船、Spar平臺風力機和陸上風力機進行比較,證明MIT/NREL張力腿式漂浮式風力機是一種比較好的概念設計。同時,研究發現風力機控制策略對漂浮式平臺結構的波浪響應有較大影響,高于額定風速的葉片變槳控制策略會引起較大的諧振響應,從而降低結構的疲勞壽命[26]。
3.2 漂浮式風力機在美國的研究
2001年,MIT的Sclavounos提出了兩種不同的雙弦腿浮體平臺的漂浮式風力機設計方案[27],雙弦腿浮體平臺兼具張力腿和浮柱兩種平臺的特點,成為美國NREL后續研究的重點。
NREL則在2004年開始進行深海漂浮式風力機的可行性研究[28],并進行相應的工程技術風險評估研究[29],研究成果表明:漂浮式風力機的概念設計可依據其水動力特性將其劃分為張力腿、浮柱、駁船平臺模型以及三者的組合模型,并需要綜合考慮,這為漂浮式風力機的理論建模和試驗研究提供了新的研究思路。
MIT后來的一系列研究則集中于漂浮式風力機整機動力學分析模型的建立和相關全耦合設計軟件的開發[30]。文獻[31]首先提出了基于海洋水動力學和空氣動力學的耦合算法計算深海構筑物動態響應,并計算出3種不同海況情況下平臺6個自由度的響應振幅算子,與固定平臺上安裝的海上風力機比較,證明漂浮式風力機開發在技術上是完全可行的。文獻[32]則使用MIT開發的swim motions lines(SML)水動力學軟件對基于兩種雙弦腿浮體平臺設計的1.5 MW風力發電機組的5種不同海況條件下的水動力學特性進行分析,特別給出了考慮風和波浪的雙重擾動下平臺的非線性水動力學特性。文獻[33]考慮動力學與經濟性兩方面因素,分別對比了TLP平臺設計和駁船平臺的5 MW漂浮式風力發電機組,在3種不同海況情況下,對整個系統的年發電量進行了詳細分析。文獻[34]提出采用美國NWTC軟件包結合商用MSC.ADMAS軟件,建立風力機氣彈—水動力全耦合仿真系統的思想,并探討了相應的理論模型。文獻[35]利用上述工具,對MIT/NREL淺水駁船和MIT/NREL TLP平臺模型性能進行水動力學性能和經濟性對比計算,但是沒有考慮極端載荷條件的水動力學性;文獻[36]進一步利用WAMIT水動力計算軟件、NWTC的風力機氣動-結構設計軟件包和MSC.ADAM,建立并實現了建立氣動—水動—伺服—彈性全耦合仿真系統的設想,并利用該系統研究隨機風浪環境下漂浮式風力機的動態響應,研究發現由于NWTC.FAST軟件采用模態分析方法,由于在葉片建模中才用到自由度較少制約了仿真結果。文獻[37]利用上述氣動—水動—伺服—彈性全耦合仿真系統計算了兩種不同形式的深水駁船平臺(ITI Energy Barge和MIT/NREL SDB),特別計算兩種駁船的極端海況條件下的水動力載荷特性,并考慮變槳控制對水動力特性的影響。
與MIT研究不同,馬薩諸塞大學安默斯特分校的Sebastian和Lackner采用自由尾跡理論作為耦合分析系統中的風力機的氣動模型算法[38],開發了相應的算法模塊wake induced dynamics simulator(WInDS),并與歐洲MEXICO風洞實驗數據進行比較,在部分測試工況計算值與實驗值相差僅在5%[39],并利用WInDS/FAST耦合求解ITI能源駁船、Hy-Wind Spar-Buoy平臺NREL 5 MW風力機動力學性能;算例顯示:該程序不但可以得到滿意的結果,也可以得到非定常的風力機尾跡演化特性[40]。
2006年,美國Concept Marine Associates Inc.公司的Fulton等在延續海上石油天然氣半潛式鉆井平臺設計思路給出的半潛式張力腿平臺漂浮式風力機設計方案[41],美國加州海洋創新技術公司與美國航空環境公司的研究人員在2006年采用基于墨西哥灣暴風模型的傅立葉譜分析方法,分析可工作在2 300 m水深的平臺(它是布置了3臺風力機的三角形水泥混凝土TLP漂浮式平臺)的動力響應[42],用Runge-Kutta方法計算了縱蕩、橫蕩和垂蕩響應以及縱搖、橫搖和垂搖運動,得出在不同風浪荷載的系泊系統的錨鏈張力,對系泊系統設計有較大的參考價值。
3.3 漂浮式風力機在日本的研究
東京大學自2004年對三角形多風機半潛式海工平臺水動特性進行了系統研究[43],并進行了水池實驗[44]和數值計算[45],后又對單體漂浮平臺水動特性進行了水池實驗(見圖4)[46],從經濟性和可靠性角度看,后者優于前者。
為了更好地促進海上風力發電的國際合作,IEA于2005年成立了由DTU瑞索國家實驗室(Ris?)和NREL發起成立的風能第23任務組。目前由21個國家和兩個國際組織組成,已經完成海上風力機設計軟件計算結果對比[47],單樁[48]、四腳架[49]、漂浮式海上風力機[50]等計劃中的前四階段任務,目前已經進入新的OC4研究階段。目前我國尚沒有研究人員與機構參與其中,與國外差距日益增大。
國內對漂浮式風力機的研究則剛剛起步,主要集中于理論和水池實驗研究。其中哈爾濱工業大學[51]、哈爾濱工程大學[52]和上海理工大學[53]為較早開展相關研究的學校,此外,大連理工大學[54]、重慶大學[55]、解放軍工程大學[56]也有相關研究論文發表。
4 漂浮式風力機的水池與數值實驗研究
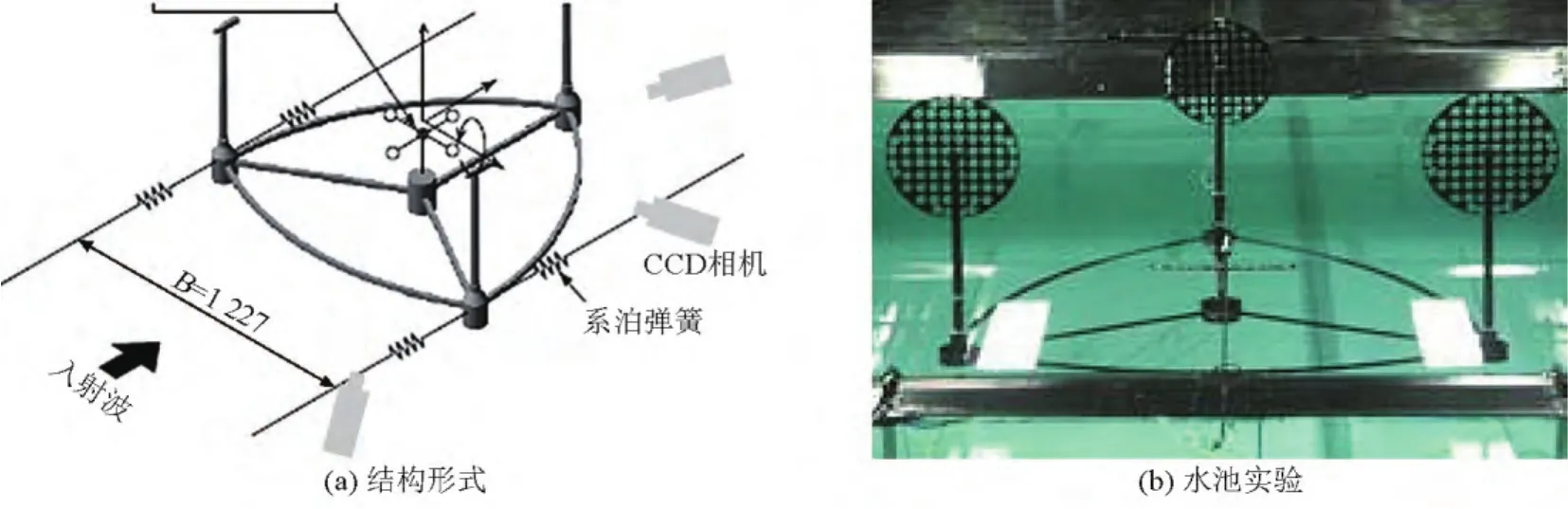
圖4 三角形半潛式海洋平臺研究(單位:mm)Fig.4 Research of Semi-submersible triangle offshore platform(unit:mm)
鑒于深海漂浮式風力機的運行海域的惡劣環境,其所受各種載荷非常復雜,為降低開發風險與成本,水池實驗和基于多體動力學的整機仿真或數字樣機技術都被廣泛應用于深海漂浮式風力機的設計中。因此,深海漂浮式風力機的理論建模、軟件仿真和水動力學實驗,三者相互依賴,互為補充。
4.1 模型水池實驗研究
作為最早商用漂浮式風力機項目,挪威國家石油公司的HyWind漂浮式風電機組自2009年9月起在挪威海岸附近的北海220 m水深環境中進行試運行[57]。在此項目預研階段,采用水池實驗與軟件仿真方法系統地研究了漂浮式平臺結構的水動力特性及對風浪組合荷載的響應(見圖5a),該項目的軟件仿真與水池實驗相結合方法對后續研究有較大的借鑒意義。與之類似,前述美國加州海洋創新技術公司2009年開發了Windfloat平臺,也參照上述流程,進行了相應的概念設計與選型計算[58]、水池實驗(如圖5b所示)和水動力計算[59]和整機結構動力學計算[60]。此外,德國Grossmann Ingenieur Consult GmbH公司的漂浮式風力機安裝平臺非常有特色,并在2012年3月在漢堡船模水池完成1∶20模型水池實驗[61],這表明在未來,深海漂浮式風力機的海工平臺將會獨立成為一個行業。
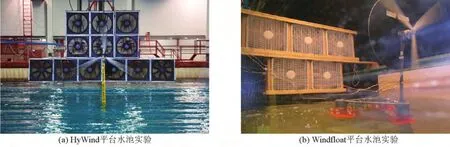
圖5 漂浮式風力機的水動力學實驗Fig.5 Hydrodynamic experiments of floating wind turbine
目前,已知的關于漂浮式風力機的水池實驗,詳見表1,模型比尺在1∶20到1∶150不等,估計隨著開發的風力機的發電功率越來越大,未來的模型比尺將不得不超過1∶150,因為小模型水池實驗仍會是未來漂浮式風力機水池實驗一個重要挑戰。
4.2 設計軟件
現代風力機正日益呈現大型化和智能化趨勢,這意味著原有的工程設計方法和經驗控制手段將逐漸被現代風力機設計軟件和控制軟件替代。風力機設計軟件作為體現設計思想、設計方法和設計工具的一種載體,已經在現代風力機行業處于核心位置,開發具有自主知識產權海上漂浮式風力機設計軟件是進行該領域研究的基本條件之一。
現有的深海漂浮式風力機設計軟件主要有德國勞氏船級社的GH.Bladed軟件、美國NREL的NWTC.FAST軟件與MSC.ADAMS組合、挪威海洋工程研究所的SIMO/RIFLEX軟件與丹麥科技大學的HAWC/HAWC2或FLEX5組合、以及挪威船級社(DNV)的SESAM.DeepC軟件、挪威生命科學大學的3Dfloat軟件等,其他類似的設計軟件或組合詳見文獻[63]。
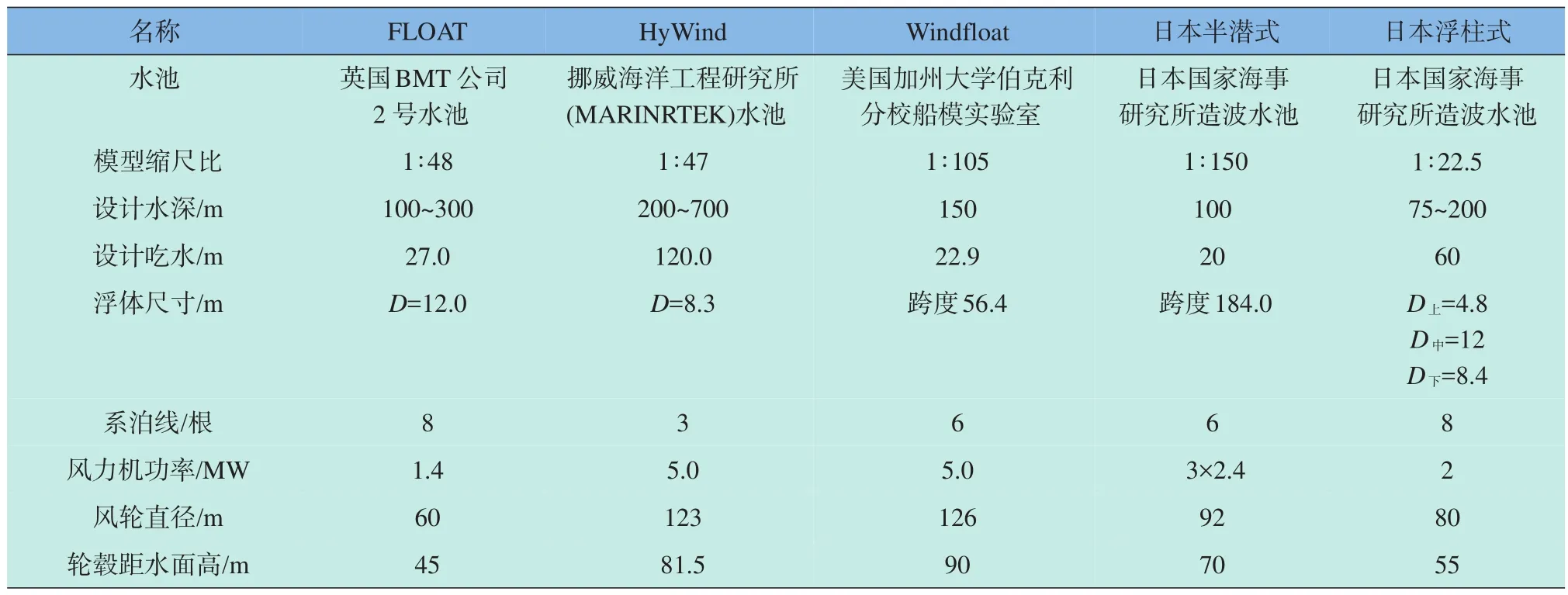
表1 漂浮式風力機模型試驗技術參數[62]Table 1 Technical specifications of floating wind turbine hydrodynamic experiments[62]
雖然這些軟件功能各不相同。但基本由4大功能模塊組成,即氣動模塊、水動力模塊、結構動力學模塊和控制模塊(如表2所示),其采用的算法多半相近,但由于對于深海漂浮式風力機整體動力學的耦合機理和解耦機制尚無深入全面的研究。以上所有開發設計軟件或其組合基本都采用界面耦合方法,即分別在風力機氣動—平臺結構和平臺結構—水動力學界面上設置約束條件,強行耦合,各系統獨立計算,或者采用迭代計算方法,先算某種效應,然后再折合為附加質量或者附加載荷方法考慮計算其他一種效應,故而無法準確反映其耦合機制本質和影響。有必要開發更有效的全耦合算法和仿真模型用于深海漂浮式風力機的設計和認證。
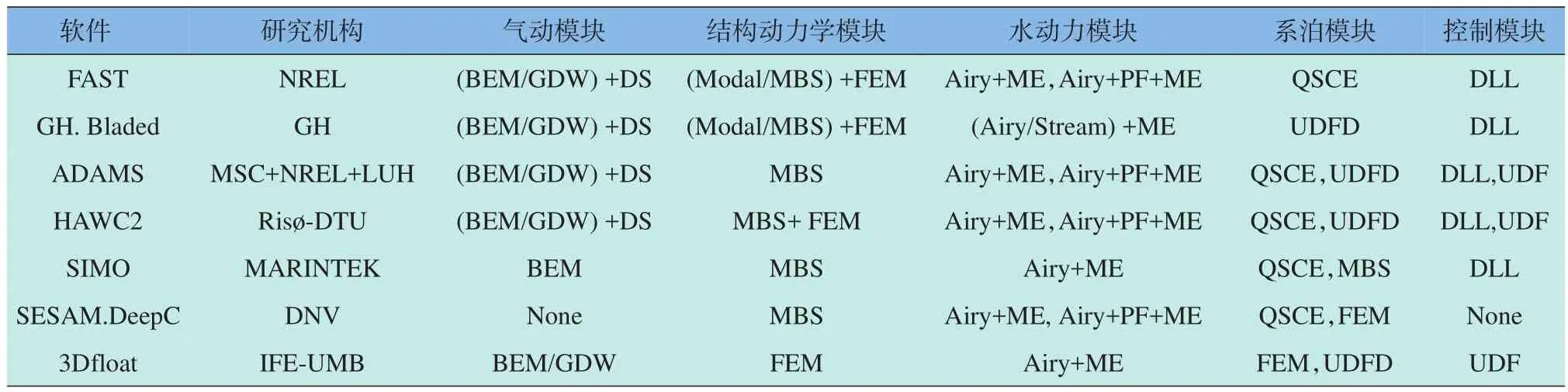
表2 海上風力機設計與仿真軟件架構及模塊[50]Table 2 Software architecture and module of offshore wind turbine design and simulation[50]
表2中,氣動模塊采用動量葉素理論和廣義動態尾跡理論,部分軟件考慮動態失速修正,但普遍缺乏反映長柔葉片和高塔架氣動彈性的算法;水動力模塊多采用線性波理論與Mrison方程相結合的方法,個別軟件(GH.Bladed)進一步考慮了海流影響。部分來自船舶和海洋平臺計算軟件,則采用了波輻射和散射修正的線性勢流理論結合Mrison方程的方法,但由于漂浮式風力機的上部結構的特殊性,該算法的有效性存疑;結構動力學模塊中的風力機與漂浮式平臺采用有限元方法(FEM)或者多體動力學方法,系泊系統采用準靜態懸鏈線方程。風力機專用結構動力學軟件(NWTC.FAST和GH.Bladed)則采用假設模態法與多體動力學相結合的技術,而船舶和海洋工程計算軟件由于對系泊系統計算要求較高,則采用用戶自定義力與位移關系方法計算系泊系統載荷,工作量大且難以掌握;控制模塊基本都采用GH.Bladed格式的動態鏈接庫(DLL)方法導入仿真模塊,有些軟件則提供用戶自定義格式(UDF)的控制文件。
4.3 數值實驗
漂浮式風力機是復雜的氣動—彈性—波浪—海流—系泊相互作用(氣動—彈性—水動力學相互耦合)的多柔體系統[64]。在流體自由表面上,該系統在自身浮力、重力及系泊力作用下處于平衡狀態,系統的各種擾動(風—波—流)都具有非定常、強非線性的特點。物理上屬具有自由表面流體與柔性體的耦合問題。其機理相當復雜:柔性體(彈性體)的變形運動作為邊界條件導致其周圍流場的改變,同時流場作用在柔性體表面的壓力分布又影響其變形運動,二者同時作用,難以分離。又因柔性體抗彎剛度較小,與流體作用過程中易產生大位移變形。因此,必須求解變形運動的高階偏微分控制方程。流體和柔性體邊界的相互耦合作用使得求解結構動力學方程時必須考慮流場壓力的改變,同理求解周圍流場時也不能忽略彈性體邊界的影響。若考慮流場的非定常特性,則問題會更加復雜。因此,對于該類問題,必須同時求解流場和結構動力學控制方程,或者采用有效的解耦算法。
雖然流固耦合問題的數值算法比較成熟,如差分方法(風力機氣動計算時常用)、邊界元算法(水動力學計算常用)和FEM(整機結構動力學計算常用)等,但是由于現代風力機尺度上特別巨大(5 MW風力機葉輪直徑超過120 m,塔架接近90 m),在空間域上離散需要大量網格,大型機以下計算工具無法滿足其計算需要,所以相關漂浮式風力機的整機計算流體力學/計算結構力學耦合計算還未見相關研究;此外,由于流體控制方程對流項的存在及保證流固耦合計算的穩定性和計算精度要求采用較小時間步長,計算非常耗時;最后,在整個產品開發過程中,需要反復對產品深化設計或者改型計算,數值算法顯然無法滿足以上要求。
5 結語
綜上所述,鑒于深海風能開發的急迫需要,對于漂浮式風力機的研究需求日益迫切,但是現有的研究明顯存在以下不足。
1)目前深海漂浮式風力機的很多概念設計基本上都屬于延續海洋石油工業領域以往經驗的做法,即將風力機安裝在海洋石油平臺上。由于海洋石油平臺的體積相對于漂浮式風力機而言比較龐大,直接采用該平臺會增加建設成本;另外深海漂浮式風力機氣動載荷要遠高于海洋平臺,但是水動力載荷則小于后者。因此,機械的采用原有的海洋石油平臺的水動力計算方法,無法真實反映深海漂浮式風力機的動力學特性。
2)但相對于陸上風力機和淺海風力機,目前尚無深海漂浮式風力機(歐洲以50 m,美國則以60 m劃分)的設計方法和認證標準,如國際電工委員會(IEC)海上風力機發電機組設計要求(IEC 61400-3—2009),德國勞氏船級社海上風力機認證準則(GL Rules and Guidelines IV2,2007),DNV海上風力機結構設計標準(DNV-OS-J101—2007)和德國聯邦海事與水運署(BSH)海上風力機設計準則(BSH 7005—2007)和海上風電場勘察準則(BSH 7004—2008)主要是針對近岸或淺海風力機。
3)盡管我國早在20世紀90年代就開始進行相關風力機設計軟件的開發,如中國空氣動力研究與發展中心開發的風力機設計軟件包和汕頭大學開發的風力機全系統載荷分析及優化設計軟件包及后續系列模塊,但是從整體上看,從軟件功能、易用性和版本更新等都略遜于國外同類軟件。一定程度上造成了目前我國風力機設計和制造領域都嚴重依賴于國外相關公司,須予以足夠的重視。
[1]高 坤,李 春,高 偉.新型海上風力發電及其關鍵技術研究[J].能源研究與信息,2010(2):110-116,105.
[2]Heronemus W E.Pollution-free energy from offshore winds[C]//Proceedings of The 8th Annual Conference and Exposition Marine Technology Society.USA:Washington DC,1972.
[3]鮑亦和.漂浮式海上風電場[J].上海電力,2007(2):58-60.
[4]Satchwell C J.Moored floating platforms for wind-turbines[C]//Royal Aeronautical Society Conference:Offshore wind power mega-projects,1988.
[5]Tong K C,Quarton D C,Standing R.Float-a floating offshore wind turbine system in wind energy conversion[C]//Proceeding of the BWEAWind Energy Conference.England:York,1993.
[6]Tong K C.Technical and economic aspects of a floating offshore wind farm[J].Journal of Wind Engineering and Industrial Aerodynamics,1998(4):399-410.
[7]Barltrop N.Multiple floating offshore wind farm(MUFOW)[J].Wind Engineering,1993,17(4):183-188.
[8]Bertacchi P,Di Monaco A,Gerloni M,et al.Eolomar-a moored platform for wind turbines[J].Wind Engineering,1994,18(4):189-191.
[9]高 偉,李 春,劉 全.深海漂浮式風力機的概念設計與氣動—水動力耦合特性評述[J].能源研究與信息,2011,27(3):168-173.
[10]Halfpenny A.Dynamic analysis of both on-and off-shore windturbines in the frequency domain[D].London:University College London,1998.
[11]Henderson A R.Analysis tools for large floating offshore wind farms[D].London:University College London,2000.
[12]Vijfhuizen W J M J.Design of a wind and wave power barge[D].UK:Glasgow Universities of Glasgow and Strathclyde,2006.
[13]Bulder B H,Van Hees M Th,Henderson A R,et al.Study of the feasibility and boundary conditions of floating offshore wind turbines[R].TNO Report 2002-CMC-R043,Netherlands,2002.
[14]Blue H.Website for the Blue-H floating wind turbine prototype in Brindisi harbor[EB/OL].[2012—6—20].http://www.bluehgroup.com.
[15]Henderson A R,Patel M H.On the modeling of a floating offshore wind turbine[J].Wind Energy,2003,6(1):53-86.
[16]Chen Zhenzhe.Deepwater floater for wind turbines[D].Kongens Lyngby:Technical University of Denmark,2005.
[17]Chen Zhenzhe,Tarp-Johansen N J,Jensen J J.Mechanical characteristics of some deepwater floater designs for offshore wind turbines[J].Wind Engineering,2006,30(5):417-430.
[18]Psichogios N.Design of a hydro-aeroelastic model scale TLP wind turbine[D].Kongens Lyngby:Technical University of Denmark,2011.
[19]Ramachandran G,Bredmose H,S?rensen J,et al.Fully coupled three dimensional dynamic response of a TLP floating wind turbine in waves and wind[C]//Proceedings of the OMAE 2012.Brazil:Rio De Janeiro,2012.
[20]Akin D.Response of an off shore wind turbine to simultaneous wind and wave loads[D].Kongens Lyngby:Technical University of Denmark,2011.
[21]Nielsen F G,Hanson T D,Skaare B.Integrated dynamic analysis of floating offshore wind turbines[C]//Proceedings of the OMAE 2006.Germany:Hamburg,2006.
[22]Skaare B,Hanson T D,Nielsen F G.Integrated dynamic analysis of floating offshore wind turbines[C]//Proceedings of the OMAE 2007.USA:San Diego,2007.
[23]Linde B.Motion of floating wind turbines[D].Trondheim:Norwegian University of Science and Technology,2010.
[24]Solberg T.Dynamic response analysis of a spar type floating wind turbine[D].Trondheim:Norwegian University of Science and Technology,2010.
[25]Karimirad M.Stochastic dynamic response analysis of spar-type wind turbines with catenary or taut mooring systems[D].Trondheim:Norwegian University of Science and Technology,2011.
[26]Matha D.model development and loads analysis of an offshore wind turbine on a tension leg platform,with a comparison to other floating turbine concepts[R].NREL/TP-500-45891.USA:Golden,2009.
[27]Kim S,Sclavounos P D.Fully Coupled response simulations of theme offshore structures in water depths of up to 10,000 Feet.[C]//Proceedings of 11th ISOPE.Norway:Stavanger,2001.
[28]Musial W,Butterfield S,Boone A.Feasibility of floating platform systems for wind turbines[R].NREL/CP-500-34874.Golden,CO,USA,2004.
[29]Butterfield S,Musial W,Jonkman J M,et al.Engineering challenges for floating offshore wind turbines[C]//Proc.of Copenhagen Offshore Wind 2005 Conference and Expedition Proceedings.Denmark:Copenhagen,2005.
[30]MIT.Low Wind speed technology phase II:offshore floating wind turbine concepts:fully coupled dynamic response simulations[R].DOE/GO-102006-2206,NTIS.USA:Springfield,2006.
[31]Withee J E.Fully coupled dynamic analysis of a floating wind turbine system[D].Cambridge:Massachusetts Institute of Technology,2002.
[32]Lee K H.Responses of floating wind turbines to wind and wave excitation[D].USA:Massachusetts Institute of Technology,2004.
[33]Wayman E N.Coupled dynamics and economic analysis of floating wind turbine systems[D].USA:Massachusetts Institute of Technology,2004.
[34]Jonkman J M,Sclavounos P D.Development of fully coupled aeroelastic and hydrodynamic models for offshore wind turbines[C]//2006 ASME Wind Energy Symposium Reno.USA:Golden,2006.
[35]Wayman E N,Sclavounos P D,Butterfield S,et al.Coupled dynamic modeling of floating wind turbine systems[C]//Offshore Techndogy Conference Houston.USA:Golden,2006.
[36]Jonkman J M,Buhl M L Jr.Development and verification of a fully coupled simulator for offshore wind turbines[C]//45th AIAA Aerospace Sciences Meeting and Exhibit,Wind Energy Symposium.USA:Golden,2007.
[37]Jonkman J M.Dynamics modeling and loads analysis of an offshore floating wind turbine[R].NREL/TP-500-41958.USA:Golden,2007.
[38]Sebastian T,Lackner M.A comparison of first-order aerodynamic analysis methods for floating wind turbines[C]//Proceedings of 48th AIAA Aerospace Sciences Meeting.USA:Orlando,2010.
[39]Sebastian T,Lackner M.Development of a free vortex wake method code for offshore floating wind[J].Renewable Energy,2012(46):269-275.
[40]Sebastian T,Lackner M.Analysis of the induction and wake evolution of an offshore floating wind turbine[J].Energies,2012(5):968-1000.
[41]Concept Marine Associates.Wind speed technology phase II:semi-submersible platform and anchor foundation systems for wind turbine support[R].DOE/GO-102006-2198.USA:NTIS,Springfield,2006.
[42]Zambrano T,MacCready T,Kiceniuk T Jr,et al.Dynamic modeling of deepwater offshore wind turbine structures in Gulf of Mexico storm conditions[C]//Proceedings of the 25th OMAE:2006-92029.Germany:Hamburg,2006.
[43]Ishihara T.Challenges and future prospects in the development of wind power in Japan[J].Civil Power,2004,314:3-9.
[44]Ishihara T,Phuc P V,Sukegawa H,et al.A study on the dynamic response of a semisubmersible floating offshore wind turbine system part 1:water tank test with considering the effect of wind load[C]//Australia:Proceedings of 12th ICWE,2007.
[45]Phuc P V,Ishihara T.A study on the dynamic response of a semi-submersible floating offshore wind turbine system part 2:Numerical simulation[C]//Australia:Proceedings of 12th ICWE,2007.
[46]Ishihara T,Waris M B,Sukekawa H.A studay on influence of heave plate on dynamic response of floating offshore wind turbine system[C]//Japan:Proceedings of the 3rd EOW,2009.
[47]Passon P,Kühn M,Butterfield S,et al.OC3—benchmark exercise of aero-elastic offshore wind turbine codes[C]//Journal of Physics(Conference Series):The 2nd Conference on The Science of Making Torque From Wind.Denmark:Copenhagen,2007.
[48]Jonkman J M,Butterfield S,Passon P,et al.Offshore code comparison collaboration within IEA wind annex XXIII:phase II results regarding monopile foundation modeling[C]//Pro-ceedings of EOWC(the IEA European Offshore Wind Conference).Germany:Berlin,2007.
[49]Nichols J,Camp T,Jonkman J M,et al.Offshore code comparison collaboration within IEA wind annex XXIII:phase III results regarding tripod support structure modeling[C]//Proceedings of 47th AIAA Aerospace Sciences Meeting Including The New Horizons Forum and Aerospace Exhibition.USA:Orlando,2008.
[50]Jonkman J M,Larsen T,Hansen A,et al.Offshore code comparison collaboration within IEA wind task 23:phase IV results regarding floating wind turbine modeling[C]//EWEC 2010.Warsaw,Polang,2010.
[51]任年鑫.海上風力機氣動特性及新型浮式系統[D].哈爾濱:哈爾濱工業大學,2011.
[52]黃 俊.海上浮式風力發電機組載荷及結構性能研究[D].哈爾濱:哈爾濱工業大學,2010.
[53]高 坤.海上漂浮式風力機的概念設計與仿真研究[D].上海:上海理工大學,2010.
[54]Ren Nianxin,Li Yugang,Ou Jinping.The effect of additional mooring chains on the motion performance of a floating wind turbine with a tension leg platform[J].Energies,2012(5):1135-1149.
[55]王 磊.海上風電機組系統動力學建模及仿真分析研究[D].重慶:重慶大學,2011.
[56]段金輝,李 峰,王景全,等.漂浮式風電場的基礎形式和發展趨勢[J].中國工程科學,2010,12(11):66-70.
[57]Oslo.Hywind Floating Turbine Installled[EB/OL].[2009—06—20].http://www.renewableenergy world.com/rea/news/article/2009/06/hywind-moved-into-position#.
[58]Roddier D G,Cermelli C A,Weinstein A.Windfloat:a floating foundation for offshore wind turbines Part I:Design basis and qualification process[C]//Proceedings of the 29th OMAE:2009-79229.USA:Honolulu,2009.
[59]Cermelli C A,Roddier D G,Aubault A.Windfloat:a floating foundation for offshore wind turbines.part II:hydrodynamics[C]//Proceedings of the 29th OMAE:2009-79231.USA:Honolulu,2009.
[60]Aubault A,Cermelli C A,Roddier D G.Windfloat:a floating foundation for offshore wind turbines.part III:structural analysis[C]//Proceedings of the 29th OMAE:2009-79232.USA:Honolulu,2009.
[61]GICON GmbH.GICON successfully tests floating foundation foroffshorewind [EB/OL].[2012—06—20]www.gicon.de_en_geschaeftsberei che_gte_sof.html.
[62]趙 靜,張 亮,葉小嶸,等.模型試驗技術在海上浮式風電開發中的應用[J].中國電力,2011,44(9):55-60.
[63]Cordle A,Jonkman J.State of the art in floating wind turbine design tools[R].NREL/TP-500-50543.USA:Golden,2011.
[64]Matha D,Schlipf M,Cordle A,et al.Challenges in simulation of aerodynamics,hydrodynamics,and mooring-line dynamics of floating offshore wind turbines[R].NREL/TP-500-50544.USA:Golden,2011.
The current situation and latest research of deep-sea floating wind turbine
Gao Wei1,2,Li Chun1,Ye Zhou1
(1.School of Energy and Power Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Technology Research Institute,China Datang Group Creative Wind Energy Co.,Ltd.,Qingdao,Shandong 266000,China)
Offshore wind farm is the latest direction of the wind power technology,with the further development of offshore wind farms technology,it is inevitable that future trend of offshore wind farms from offshore to deep sea.With increasing of sea-water depth,the cost of wind farm construction increased.The technology of floating wind turbine is an effective way to solve this problem.This paper systematically describes that early history,current situation and latest research of deep-sea floating wind turbine in the foreign academics,focuses on its theoretical analysis,simulation and hydrodynamic experimental,further refers to the shortcomings of that studies,accordingly propose some new research directions and ideas.
deep sea;floating wind turbine;system simulation;hydrodynamic experiments
TK83
A
1009-1742(2014)02-0079-09
2012-09-18
國家自然科學基金項目(E51176129);教育部高等學校博士學科點專項科研基金(博導類)(20123120110008);國家科技支撐計劃(2012BAA01B01);上海市教委科研創新(重點)項目(13ZZ120)
高 偉,1978年出生,男,山東乳山市人,博士,主要從事海上風力機研究;E-mail:gawain_gao@hotmail.com
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19