一種基于交互特征偶的虛擬對(duì)象路徑規(guī)劃方法
2014-09-25 12:31:14楊釗,李原,俞琳,張杰
鍛壓裝備與制造技術(shù) 2014年4期
楊 釗,李 原,俞 琳,張 杰
(西北工業(yè)大學(xué) 現(xiàn)代設(shè)計(jì)與集成制造技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,陜西 西安 710072)
0 引言
由現(xiàn)代CAD、CAM和CAE等工具構(gòu)成的虛擬環(huán)境在產(chǎn)品研制各環(huán)節(jié)中發(fā)揮著巨大作用[1],虛擬環(huán)境是由若干虛擬對(duì)象(Virtual Object)構(gòu)成的,這些虛擬對(duì)象之間并不孤立,而是通過進(jìn)行頻繁的交互(Interaction)來實(shí)現(xiàn)特定的功能。對(duì)于虛擬裝配而言,零部件、工裝、工具等實(shí)體在虛擬環(huán)境中體現(xiàn)為虛擬對(duì)象,零部件之間的裝配、工裝工具對(duì)零件產(chǎn)品的夾持與定位等則體現(xiàn)為虛擬對(duì)象之間的交互,設(shè)計(jì)人員通過定義幾何體之間的交互來完成產(chǎn)品的可裝配性分析。
虛擬對(duì)象在交互過程中通常只涉及兩個(gè)對(duì)象,事實(shí)上,三個(gè)或者更多對(duì)象之間的交互可以看成是對(duì)象兩兩交互的組合。為了便于描述,將兩個(gè)對(duì)象中相對(duì)主動(dòng)(交互過程的發(fā)起者)的一方稱為主體對(duì)象(Active Object,AO),相對(duì)被動(dòng)(交互過程的承受者)的一方稱為客體對(duì)象(Passive Object,PO)。虛擬對(duì)象的交互過程往往伴隨著主體對(duì)象從初始位置到目標(biāo)位置的運(yùn)動(dòng)過程,然而這一過程一直沒有得到令人滿意的描述,導(dǎo)致產(chǎn)品開發(fā)過程中很多環(huán)節(jié)不得不依賴冗繁的人機(jī)交互。為實(shí)現(xiàn)圖1所示產(chǎn)品的裝配,設(shè)計(jì)者必須通過手動(dòng)定義幾何體之間的所有約束;同時(shí)當(dāng)約束定義好之后,零件會(huì)直接從初始位置變換到目標(biāo)位置,所有的中間過程都被忽略。而在裝配仿真領(lǐng)域,用戶必須對(duì)產(chǎn)品、工裝等的空間姿態(tài)以及動(dòng)作形式進(jìn)行詳盡的定義,例如實(shí)現(xiàn)螺栓和螺母的裝配,必須首先移動(dòng)螺母使其與螺栓同軸,然后控制其連續(xù)移動(dòng)直到合適的位置。可見即使一個(gè)如此簡(jiǎn)單的交互過程,操作起來也非常復(fù)雜。隨著飛機(jī)等產(chǎn)品復(fù)雜度的增加,虛擬對(duì)象交互的業(yè)務(wù)量將日益繁重,人工干預(yù)模式將嚴(yán)重影響交互效率的提高。

針對(duì)上述問題,一個(gè)有效的解決途徑是使虛擬對(duì)象具有一定的自主交互能力。文獻(xiàn)[2]從交互結(jié)構(gòu)與行為的內(nèi)在統(tǒng)一性出發(fā),提出了主客體對(duì)象交互結(jié)構(gòu)的特征偶構(gòu)造理論,將交互特征偶(Interaction Feature Pair,IFP)定義為主客體對(duì)象交互過程中,雙方直接參與交互的幾何特征所構(gòu)成的偶對(duì)。虛擬對(duì)象的交互行為可以根據(jù)其交互特征偶類型來判斷,從而為虛擬對(duì)象間的自主交互問題提供解決思路。本文在其研究基礎(chǔ)上,探討如何利用交互特征偶解決虛擬對(duì)象交互過程的路徑規(guī)劃問題,以實(shí)現(xiàn)使路徑規(guī)劃更趨于智能化和自動(dòng)化的目標(biāo)。
目前路徑規(guī)劃的方法可以歸納為兩大類:一類是通過典型的路徑規(guī)劃算法自動(dòng)計(jì)算和搜索路徑[3],主要方法有隨機(jī)采樣法(包括概率路標(biāo)法(PRM)和快速搜索隨機(jī)樹(RRT)法)、柵格法、人工勢(shì)場(chǎng)法、位姿空間(C空間)方法、人工智能方法等[4],在這些方法中,隨機(jī)采樣法適用于解決高維空間復(fù)雜路徑規(guī)劃問題,其中PRM[5]主要應(yīng)用于高維靜態(tài)空間,而RRT[6]適用于動(dòng)態(tài)環(huán)境或者運(yùn)動(dòng)約束下的路徑規(guī)劃,其他算法大都計(jì)算復(fù)雜性較高,路徑的規(guī)劃容易出現(xiàn)組合爆炸問題且效率低下[7];另一類是通過交互的辦法定義路徑[8],交互可在傳統(tǒng)的CAD工具上進(jìn)行,也可利用虛擬裝配系統(tǒng),但需要用戶手動(dòng)輸入相關(guān)參數(shù),在路徑規(guī)劃過程中不得不依賴冗繁的人機(jī)交互。
綜上考慮,本文提出了一種基于交互特征偶的路徑規(guī)劃方法,通過交互特征偶匹配順序引導(dǎo)虛擬對(duì)象的交互過程,將主體對(duì)象的運(yùn)動(dòng)路徑以離散點(diǎn)的形式進(jìn)行記錄,并基于快速搜索隨機(jī)樹(RRT)法實(shí)現(xiàn)其路徑規(guī)劃。該方法的優(yōu)點(diǎn)在于既簡(jiǎn)化了路徑規(guī)劃過程中的人機(jī)交互,又在一定程度上提高了路徑規(guī)劃的效率。
1 基于交互特征偶的交互過程描述
1.1 交互特征偶建模理論
虛擬對(duì)象的自主交互過程即主體對(duì)象能夠按目標(biāo)約束主動(dòng)完成與客體對(duì)象的動(dòng)態(tài)交互過程,這一過程的實(shí)現(xiàn)依賴于虛擬對(duì)象的個(gè)體結(jié)構(gòu),并通過結(jié)構(gòu)間幾何要素的逐步關(guān)聯(lián)來完成預(yù)期目標(biāo)。
定義1 交互特征(Interaction Feature,IF):在交互過程中,虛擬對(duì)象的幾何體上具有一定工程意義、并且直接參與交互的幾何特征叫做交互特征。從幾何及計(jì)算機(jī)圖形學(xué)上考慮,交互特征包括“點(diǎn)(Point)”、“線(Curve)”、“面(Surface)”三種基本類型。而且,交互特征總是成對(duì)出現(xiàn),每個(gè)交互特征總有一個(gè)與之相匹配的交互特征同時(shí)存在。
定義2 交互特征偶(Interaction Feature Pair,IFP):兩個(gè)虛擬對(duì)象進(jìn)行交互過程中,雙方的交互特征通過匹配所形成的偶對(duì)叫做交互特征偶。一個(gè)交互特征偶中至少含有一對(duì)基本交互特征,根據(jù)交互特征偶中包含的基本特征元素的數(shù)目,將其分為基本交互特征偶和復(fù)合交互特征偶。只含有一對(duì)基本特征元素的交互特征偶叫做基本交互特征偶。基本交互特征偶包含六種基本類型:點(diǎn)點(diǎn)偶(BIFPPP)、點(diǎn)線偶(BIFPPC)、點(diǎn)面偶(BIFPPS)、線線偶(BIFPCC)、線面偶(BIFPCS)和面面偶(BIFPSS),如表1 所示。復(fù)合交互特征偶是由若干基本交互特征偶組合而成的。
交互特征偶中至少應(yīng)包含兩類信息:分屬于主客體對(duì)象的交互特征信息以及交互規(guī)則信息。因此,交互特征偶可以用如式(1)所示的四元組來表示。


表1 基本交互特征偶(BIFP)
其中,Name為交互特征偶的名稱,IF|AO表示主體對(duì)象上的交互特征,IF|PO表示客體對(duì)象上的交互特征,{IR}表示交互規(guī)則集(Interactive Rule Set),即兩個(gè)對(duì)象的交互特征進(jìn)行匹配時(shí)所應(yīng)遵循的規(guī)則,包含了主客體對(duì)象交互特征元素之間的幾何約束關(guān)系,以及交互過程中所必須遵循的工程規(guī)則。其中幾何約束集描述了交互特征之間的配合關(guān)系,而工程規(guī)則集描述了交互過程中主客體對(duì)象所必須遵守的領(lǐng)域規(guī)則。當(dāng)然,針對(duì)不同的領(lǐng)域,基本交互特征偶遠(yuǎn)不止六種,而是根據(jù)具體的工程實(shí)際意義賦予其不同的名稱。例如,在裝配仿真領(lǐng)域,比較典型的基本交互特征偶如表2所示。在該領(lǐng)域中,最重要的工程規(guī)則為避障,即主體對(duì)象在運(yùn)動(dòng)過程中不能與環(huán)境中的其他對(duì)象發(fā)生干涉。
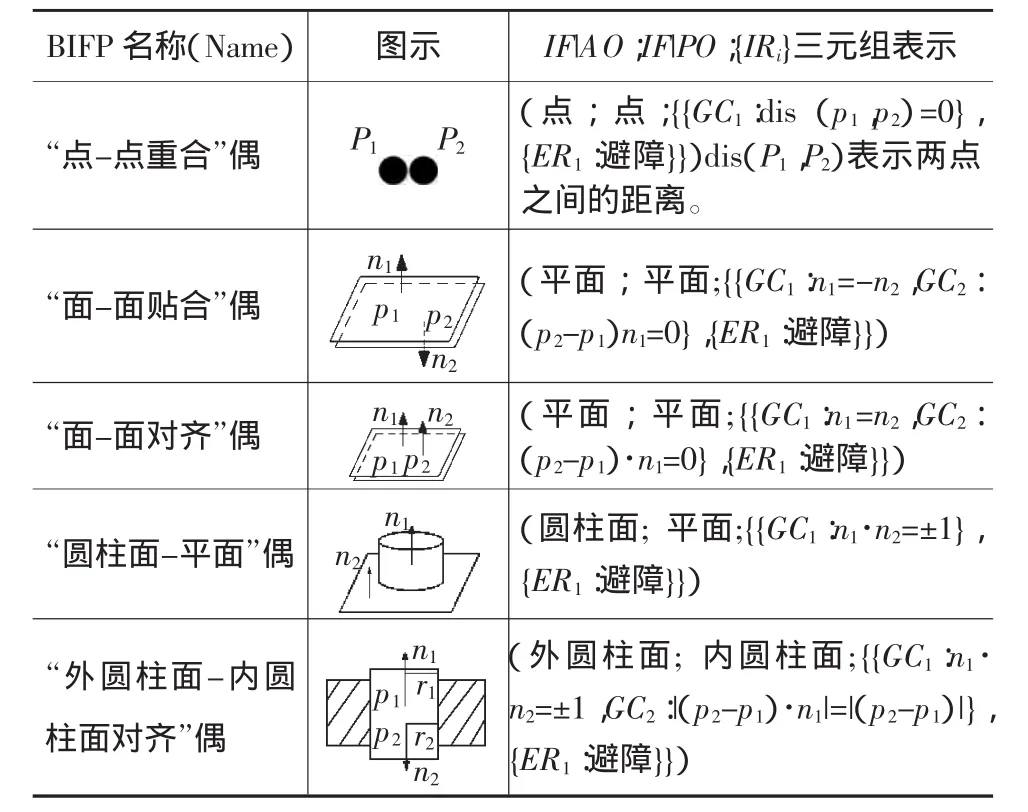
表2 常見的基本交互特征偶舉例(裝配仿真領(lǐng)域)
1.2 交互過程的離散化描述
實(shí)際上,虛擬對(duì)象交互過程的實(shí)現(xiàn)并不是一步完成的,而是隨著交互特征偶的匹配逐步完成的。虛擬對(duì)象的交互過程可以看作是虛擬對(duì)象的交互狀態(tài)隨時(shí)間(離散的時(shí)間單元)的不斷變遷,趨于目標(biāo)狀態(tài)的過程。
由于虛擬對(duì)象交互過程的實(shí)現(xiàn)依賴于計(jì)算機(jī)信息環(huán)境,在利用計(jì)算機(jī)進(jìn)行交互過程仿真時(shí),所見到的動(dòng)態(tài)畫面實(shí)際上是由一幀幀靜止畫面連續(xù)播放而成的。這些靜止的畫面可以用“狀態(tài)”來描述。
定義3 狀態(tài)(State):指虛擬對(duì)象在某一時(shí)刻或階段所表現(xiàn)出來的空間位置、姿態(tài)及其屬性。可以將動(dòng)態(tài)的交互過程通過不同的靜態(tài)狀態(tài)來定義。例如在裝配仿真領(lǐng)域,在裝配過程中的每一幀畫面都可以認(rèn)為是一個(gè)狀態(tài)。
由于虛擬對(duì)象的交互過程伴隨著主體對(duì)象從初始位置運(yùn)動(dòng)到目標(biāo)位置的過程,該過程包含的狀態(tài)包括初始狀態(tài)、目標(biāo)狀態(tài)和中間狀態(tài)。分別定義如下:
定義4 初始狀態(tài)(Initial State):主體對(duì)象在初始位置時(shí),主客體對(duì)象所表現(xiàn)出來的空間位置、姿態(tài)及其屬性;目標(biāo)狀態(tài)(Goal State):主體對(duì)象運(yùn)動(dòng)到目標(biāo)位置時(shí),主客體對(duì)象所表現(xiàn)出來的空間位置、姿態(tài)及其屬性;中間狀態(tài)(Intermediate State):主體對(duì)象從初始位置運(yùn)動(dòng)到目標(biāo)位置過程中主客體對(duì)象所表現(xiàn)出來的空間位置、姿態(tài)及其屬性。初始狀態(tài)經(jīng)過一系列中間狀態(tài)的轉(zhuǎn)變,最終達(dá)到目標(biāo)狀態(tài)。
由于交互特征偶對(duì)于交互過程具有引導(dǎo)作用,因此,當(dāng)某一時(shí)刻被賦予交互特征偶屬性的虛擬對(duì)象之間進(jìn)行IFP匹配時(shí),此時(shí)的狀態(tài)對(duì)于整個(gè)交互過程來說是很“關(guān)鍵”的,它不僅體現(xiàn)了主客體對(duì)象間存在的交互信息,而且對(duì)于整個(gè)交互過程狀態(tài)的變化趨勢(shì)起到了目標(biāo)導(dǎo)向作用。該狀態(tài)在所有狀態(tài)中的作用類似于計(jì)算機(jī)動(dòng)畫領(lǐng)域中關(guān)鍵幀的作用,它描述了虛擬對(duì)象運(yùn)動(dòng)或變化中的關(guān)鍵動(dòng)作所處的那一幀的靜態(tài)畫面。我們將其定義為交互狀態(tài)。
定義5 交互狀態(tài):被賦予交互特征偶屬性的虛擬對(duì)象,在動(dòng)態(tài)交互過程中某一時(shí)刻t的交互特征偶匹配狀態(tài)稱為交互狀態(tài)。初始狀態(tài)和目標(biāo)狀態(tài)均可視為交互狀態(tài),而中間狀態(tài)則包含交互狀態(tài)。交互狀態(tài)的定義如式2所示。

其中,{IS}表示交互狀態(tài)集(Interactive State Set),IFP(ti)(i=0,1,L m)表示某一時(shí)刻的交互特征偶匹配狀態(tài),t0為初始時(shí)刻。
交互過程不僅僅是交互狀態(tài)的集合,還應(yīng)具有一定的時(shí)序特征。例如,對(duì)于圖2所示的交互過程,首先完成“外圓柱面-內(nèi)圓柱面對(duì)齊”偶的匹配,然后該特征偶的約束下再完成“面-面貼合”偶的匹配。如果先完成“面-面貼合”偶的匹配,則在進(jìn)行“外圓柱面-內(nèi)圓柱面對(duì)齊”偶匹配的過程中必然會(huì)使得主客體對(duì)象發(fā)生干涉。

圖2 交互過程示例
通過以上定義,虛擬對(duì)象的交互過程可看作是虛擬對(duì)象的交互狀態(tài)隨時(shí)間(離散的時(shí)間單元)的不斷變遷,趨于目標(biāo)狀態(tài)的過程。交互過程與狀態(tài)機(jī)[9]中的有向圖描述較為相似,其組成包括狀態(tài)(State)、轉(zhuǎn)移(Transition)、事件(Event)、動(dòng)作(Action)等。狀態(tài)機(jī)理論的研究已較為成熟,此處不過多闡述。可用如圖3所示來描述交互狀態(tài)及其轉(zhuǎn)化關(guān)系。從初始狀態(tài)起,在事件(如位姿變換、運(yùn)動(dòng)規(guī)劃等)的觸發(fā)下,通過執(zhí)行某些動(dòng)作(平移、旋轉(zhuǎn)等),引起各交互狀態(tài)之間的遷移,從一個(gè)交互狀態(tài)轉(zhuǎn)移到下一個(gè)交互狀態(tài),直到所有的交互特征偶均已匹配完成。這樣,虛擬對(duì)象的交互過程就被離散化為一系列的順序交互狀態(tài),在其引導(dǎo)作用下,主體對(duì)象從初始位置運(yùn)動(dòng)到目標(biāo)位置,整個(gè)交互過程結(jié)束。

圖3 交互過程的交互狀態(tài)離散化描述
2 交互特征偶引導(dǎo)的路徑規(guī)劃方法
交互特征偶匹配的本質(zhì)是幾何約束的滿足,最終表現(xiàn)為對(duì)象之間相對(duì)位移的限制,即自由度限制。主體對(duì)象在空間中相對(duì)于客體對(duì)象所有可能的運(yùn)動(dòng)方式的總和,稱為交互自由度。每當(dāng)一個(gè)交互特征偶匹配完成后,其中的幾何約束集限定了主體對(duì)象的自由度空間,主體對(duì)象只能在其自由度空間中運(yùn)動(dòng),直到完成下一個(gè)交互特征偶的匹配。在虛擬環(huán)境下,主體對(duì)象的運(yùn)動(dòng)路徑是通過記錄一系列離散的空間位姿點(diǎn)得到的,可用一系列狀態(tài)節(jié)點(diǎn)來描述,如式3所示。

其中X為狀態(tài)搜索空間,一般采用C空間法對(duì)其進(jìn)行描述,首先進(jìn)行當(dāng)前狀態(tài)下交互自由度的判斷,以此來確定C空間的維數(shù),從而簡(jiǎn)化計(jì)算;xinit∈X為初始狀態(tài)節(jié)點(diǎn),xgoal∈X為目標(biāo)狀態(tài)節(jié)點(diǎn)(交互特征偶匹配完成);(x1,x2,L,xn)∈X 為一系列中間狀態(tài)節(jié)點(diǎn),這些節(jié)點(diǎn)由交互狀態(tài)節(jié)點(diǎn)和離散的空間隨機(jī)采樣點(diǎn)組成;xobst∈X為不可通行的非法狀態(tài)的集合,即C空間中障礙的集合。
交互特征偶引導(dǎo)的交互過程路徑規(guī)劃方法流程圖如圖4所示。

圖4 交互特征偶引導(dǎo)的路徑規(guī)劃算法流程圖
Step1:在虛擬環(huán)境中激活主體對(duì)象(AO),識(shí)別其IFP類型;
Step2:判斷當(dāng)前交互狀態(tài)下主體對(duì)象的交互自由度。在交互過程中,隨著交互狀態(tài)的改變,主體對(duì)象的自由度空間一直在發(fā)生變化(而且一般情況下會(huì)越來越小);
Step3:確定交互過程的初始狀態(tài)和目標(biāo)狀態(tài)xgoal,根據(jù)交互特征偶匹配順序,確定交互狀態(tài)順序節(jié)點(diǎn)(IFPi(i=1,2,L,n)(匹配完成);
Step4:隨機(jī)選取一系列離散的空間位姿點(diǎn),與交互狀態(tài)順序節(jié)點(diǎn)組成中間狀態(tài)節(jié)點(diǎn)(x1,x2,L,xn);
Step5:基于快速搜索隨機(jī)樹(RRT)法規(guī)劃較優(yōu)路徑;
Step6:判斷主體對(duì)象是否到達(dá)目標(biāo)狀態(tài)位置,若是,則記錄所生成的路徑,生成計(jì)算機(jī)可以執(zhí)行的動(dòng)作指令,否則返回Step1。
其中,RRT法規(guī)劃較優(yōu)路徑的具體過程如下:從初始狀態(tài)位置xinit出發(fā)構(gòu)造搜索樹T,并將xinit作為T的根節(jié)點(diǎn),交互狀態(tài)順序節(jié)點(diǎn)作為初始葉節(jié)點(diǎn)(IFPi(i=1,2,L,n),T在生長(zhǎng)過程中必須滿足交互狀態(tài)順序節(jié)點(diǎn)的引導(dǎo)約束。然后在中間狀態(tài)節(jié)點(diǎn)(x1,x2,L,xn)中除交互狀態(tài)順序節(jié)點(diǎn)外隨機(jī)選擇一個(gè)狀態(tài)點(diǎn)xrand,遍歷T,找到T上距xrand最近距離的節(jié)點(diǎn)xnear,主體對(duì)象沿著xrand到xnear依照交互自由度產(chǎn)生滿足全局約束的候選路徑集合,經(jīng)歷時(shí)間Δt,到達(dá)一個(gè)新的狀態(tài)點(diǎn)xnew,若運(yùn)動(dòng)過程中與障礙物xobst發(fā)生碰撞,則放棄這次生長(zhǎng),否則將xnew加入到隨機(jī)樹中。重復(fù)上述步驟直到xnear與xgoal距離小于搜索步長(zhǎng)L(即dis(xnear,xgoal)≤L),則代表隨機(jī)樹達(dá)到了目標(biāo)狀態(tài)節(jié)點(diǎn),算法結(jié)束。
3 數(shù)字化裝配仿真領(lǐng)域?qū)嵗?/h2>
本文所提出的方法與開發(fā)的功能模塊,在CATIA V5 R18平臺(tái)上,以CAA FOR CATIA V5為開發(fā)工具,MS Visual Studio 2005為開發(fā)環(huán)境,以某型發(fā)動(dòng)機(jī)組件為例在數(shù)字化裝配仿真領(lǐng)域進(jìn)行實(shí)例驗(yàn)證。用戶只需選擇主體對(duì)象和客體對(duì)象,系統(tǒng)將自動(dòng)讀取其交互特征偶,此時(shí)便可預(yù)覽兩個(gè)對(duì)象的交互過程,并對(duì)交互過程進(jìn)行路徑規(guī)劃。如圖5所示,選擇螺釘(Air_Filter_Bolt.4)為主體對(duì)象,空氣過濾器箱蓋(Air__Filter_Cover.1)為客體對(duì)象,系統(tǒng)將通過檢索預(yù)先建立的裝配與仿真領(lǐng)域中的基本交互特征偶BIFP庫(kù),自動(dòng)讀取其交互特征偶并賦予對(duì)象的屬性值。

圖5 主客體對(duì)象選擇及交互特征偶實(shí)例化

表3 主客體對(duì)象的交互特征偶
單擊路徑規(guī)劃按鈕,彈出RRT算法路徑規(guī)劃對(duì)話框,如圖6所示。
圖6中所示主客體對(duì)象的交互過程表現(xiàn)為螺釘從初始狀態(tài)位置到目標(biāo)狀態(tài)位置(箱蓋上螺釘孔處)的連續(xù)動(dòng)畫過程,其間要經(jīng)過兩個(gè)交互狀態(tài):第一個(gè)狀態(tài)是螺釘?shù)耐鈭A柱面與螺釘孔的內(nèi)圓柱面對(duì)齊,此時(shí)的交互自由度為2,螺釘只能沿著螺釘孔的軸線方向平移或者繞軸線旋轉(zhuǎn);另一個(gè)狀態(tài)是螺釘?shù)钠矫媾c箱蓋吊耳的平面貼合,此時(shí)螺釘?shù)慕换プ杂啥葹?,到達(dá)目標(biāo)狀態(tài)位置。確定交互過程的初始狀態(tài)節(jié)點(diǎn)(節(jié)點(diǎn)1)和目標(biāo)狀態(tài)節(jié)點(diǎn)(節(jié)點(diǎn)70),根據(jù)交互特征偶匹配順序,添加交互狀態(tài)順序節(jié)點(diǎn)(節(jié)點(diǎn)60),單擊RRT路徑搜索按鈕,系統(tǒng)將以離散路徑點(diǎn)(組件質(zhì)心)的形式進(jìn)行運(yùn)動(dòng)路徑的顯示,其中節(jié)點(diǎn)60為路徑的引導(dǎo)點(diǎn)。

4 結(jié)語
路徑規(guī)劃是分析和控制虛擬對(duì)象交互過程的重要研究?jī)?nèi)容之一,在虛擬環(huán)境中如何在封閉狹窄空間內(nèi)規(guī)劃一條合理的主體對(duì)象運(yùn)動(dòng)路徑,是有效提高交互過程執(zhí)行效率的重要考慮因素。本文所提出的交互特征偶引導(dǎo)的路徑規(guī)劃算法,通過將交互狀態(tài)順序節(jié)點(diǎn)定義為路徑的引導(dǎo)點(diǎn),這樣在使用RRT算法構(gòu)建擴(kuò)展樹時(shí)既可繞過障礙物,又可朝著目標(biāo)點(diǎn)方向生長(zhǎng),從而減少了擴(kuò)展樹生長(zhǎng)的隨機(jī)性,在一定程度上有效提高了路徑規(guī)劃效率,同時(shí),該方法使得主客體對(duì)象在交互過程定義時(shí)只需三次人機(jī)交互(即分別選擇主客體對(duì)象和添加交互狀態(tài)順序節(jié)點(diǎn)),而根據(jù)實(shí)際經(jīng)驗(yàn),完成這樣兩個(gè)零件裝配仿真詳細(xì)動(dòng)作的定義至少需要10次人機(jī)交互,因此本文提出的方法在一定程度上也滿足了對(duì)象智能交互的需求,對(duì)于提升虛擬對(duì)象的自主交互能力具有重要的實(shí)踐意義和參考價(jià)值。
[1]國(guó)家自然基金科學(xué)委員會(huì).機(jī)械工程學(xué)科發(fā)展戰(zhàn)略報(bào)告[M].北京:科學(xué)出版社,2010.
[2]Zhang J,Sun Y L,Xu Z J,Li Y.An Interaction Process Model for Virtual Objects Based on Interaction Structures.ICMSE 2013.
[3]楊 驥.飛機(jī)構(gòu)件虛擬裝配技術(shù)研究[D].南京:南京航空航天大學(xué),2007.
[4]Latombe J C.Robot Motion Planning[M].Boston:Kluwer Academic Publishers,1991.
[5]Kavraki L E,Kolountzakis M,Latombe J C.Analysis of Probabilistic Roadmaps for Path Planning.IEEE Tr.on Robotics and Automation.Minneapolis,1996[C].14(1):166-171.
[6]LaValle,Steven M.Rapidly-exploring Random Trees:A New Tool for Path Planning [R].ComputerScienceDepartment,IowaState University,1998.
[7]李 剛,馬良荔,郭曉明.交互式拆卸引導(dǎo)裝配路徑規(guī)劃方法研究[J].計(jì)算機(jī)應(yīng)用與軟件,2012,29(10):248-250.
[8]鄭 軼,寧汝新,劉檢華,等.交互式虛擬裝配路徑規(guī)劃及優(yōu)選方法研究[J].機(jī)械工程學(xué)報(bào),2006,17(11):1153-1156.
[9]李志軍.基于狀態(tài)機(jī)的安全漏洞檢查機(jī)制的設(shè)計(jì)與實(shí)現(xiàn) [D].西安:西安電子科技大學(xué),2010.
[10]符 磊,余劍峰,張 杰.基于多級(jí)骨架模型的關(guān)聯(lián)設(shè)計(jì)方法研究[J].鍛壓裝備與制造技術(shù),2013,48(4):94-98.
[11]龔志海,葉春生,黃樹槐.FDM支撐生成算法及支撐路徑規(guī)劃研究[J].鍛壓裝備與制造技術(shù),2006,41(3):92-94.
猜你喜歡
南大法學(xué)(2021年3期)2021-08-13 09:22:32
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
自然與文化遺產(chǎn)研究(2016年2期)2016-05-17 05:53:59
山東青年(2016年1期)2016-02-28 14:25:25
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
山西大同大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2015年6期)2015-01-22 07:22:22
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
公務(wù)員文萃(2013年5期)2013-03-11 16:08:37
