基于模糊控制的永磁同步電機控制研究
2014-10-10 04:06:24梁新濤
機電信息 2014年33期
梁新濤
(鄭煤集團公司機電運輸部,河南鄭州 450000)
基于模糊控制的永磁同步電機控制研究
梁新濤
(鄭煤集團公司機電運輸部,河南鄭州 450000)
針對傳統永磁同步電機矢量控制系統的不足,給出了一種參數自整定模糊PI控制器,用于永磁同步電機矢量控制。根據模糊控制基本原理,設計了永磁同步電機的雙閉環模糊PI控制器。基于Matlab/Simulink仿真平臺,對模糊PI控制的永磁同步電機控制系統進行了仿真分析。仿真結果表明,對于有較高動態調速性能要求的永磁同步電機矢量控制系統,對轉速、轉矩采用模糊PI控制效果要大大優于傳統控制方式。最后根據仿真模型,搭建實驗平臺驗證了所提出的控制方法的正確性和有效性。
永磁同步電機;模糊PI;解耦
0 引言
永磁同步電機(PMSM)因具有結構簡單、運行可靠、轉矩慣性比和能量密度高等特點[1]而在一些高性能的調速系統和伺服系統中得到了廣泛的應用。但由于永磁同步電機是一個多變量非線性強耦合時變系統,同時調速驅動系統一般采用PWM控制的電力電子功率器件作為執行單元也進一步加強了整個系統的非線性,加之系統通常無法運行在理想的環境下,系統中還存在各種各樣的擾動,因此常規控制策略很難滿足高性能調速控制系統的控制要求[2]。
傳統的PMSM矢量控制系統通常采用比例積分(PI)控制,在一定程度上PI控制器可以滿足調速系統的基本要求,但由于算法本身是建立在精確數學模型的基礎之上,依賴于電機本體參數,使得其魯棒性較差。而且實際的PMSM控制系統中被控對象會隨運行情況而變化,對一些精度要求高的場合,固定增益的PI控制器無法獲得滿意的控制效果[3]。模糊(Fuzzy)控制是一種能夠模擬人類思維的智能控制方法,它降低了對被控對象數學模型精確度的要求,可以有效地降低系統的非線性,具有較好的魯棒性。模糊控制被廣泛地應用于自然科學與社會科學的許多領域[4]。
本文綜合利用模糊控制和PI控制器的優點,提出并設計了智能模糊PI控制器,通過建立滿足一定性能要求的模糊控制規則,使得永磁同步電機調速系統獲得了良好的動靜態性能。最后通過Matlab仿真和實驗平臺驗證了基于模糊PI控制器的PMSM調速系統算法的可行性和可靠性。
1 PMSM數學模型
因永磁同步電機的轉子是一個永磁體,轉子磁場正常情況下為一個恒定磁場,因此在進行矢量坐標變化時按轉子磁場方向定向來確定d軸正方向,得到dq坐標系下的數學模型[1]。
(1)dq坐標系下的定子磁鏈方程:

式中,Ld、Lq分別為定子電感的d、q軸分量為在按轉子磁場定向后經坐標變換得到的定子電流d、q軸分量;ψsd、ψsq為定向后經坐標變換得到的定子等效磁鏈的d、q軸分量;ψf為永磁同步電機中轉子永磁體建立的磁鏈的幅值。
(2)dq坐標系下的定子電壓方程:
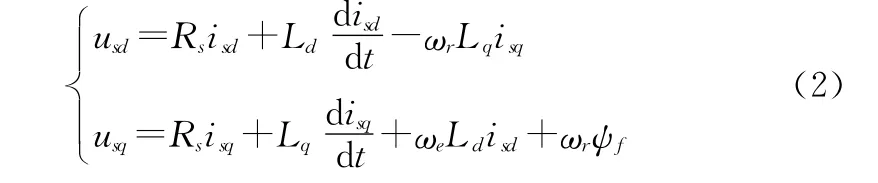
式中,usd、usq為定子電壓在d、q軸上的分量;ωr為電機轉子旋轉的電角速度(rad/s);Rs為永磁同步電機定子繞組中的等效集中參數的電樞電阻。
2 模糊PI控制器設計
由于矢量控制引入傳統的PI調節算法,在交流電機調速控制領域得到了廣泛的應用。比例控制器在一定程度上最大限度地保證了系統的動態響應速度,而積分控制的加入則使得調速系統的靜態性能得到了大幅提升。但是其參數固定,使得控制器只能在小范圍內滿足高性能要求,一旦控制系統在整個運行范圍內遇到自身參數變化或者外部運行條件擾動時,動態性能就會下降。這使得PI控制系統很難達到預期的目標[4]。
模糊控制器是一種能夠簡單模擬人的思維方式,以模糊集合和模糊規則為基礎的控制方法,它具有一定的參數在線調整能力[3]。但是單純的模糊控制卻犧牲了系統的快速性,在負載產生擾動和控制指令發生變化時系統無法快速跟蹤。本文就是結合PI調節器跟蹤速度快、動態響應能力強和模糊控制參數在線自調整的能力,提出采用模糊PI復合控制方法。基于模糊PI的控制系統結構如圖1所示,通過對輸入誤差值以及輸入誤差值變化率的判斷,用模糊控制規則來在線整定PI調節器的KP、KI,從而使控制系統在不犧牲快速響應能力和動態跟蹤性能的前提下,在整個運行范圍內具有較高的抗擾動能力和一定的自適應能力。
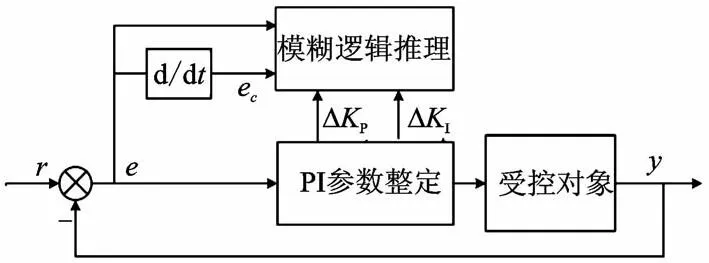
圖1 模糊PI控制系統結構圖
模糊規則是整個模糊控制器的設計核心,模糊規則設計的好壞也直接影響到整個控制系統的動、靜態性能。模糊控制規則通常使用一系列的專家知識語言進行表達,它利用知識庫的信息模擬人類的推理決策過程,給出合適的控制量。
隸屬度函數是確定精確變量與模糊變量間所屬程度的表示方法,將偏差量e和偏差變化率ec及其輸出量ΔKP和ΔKI量化到(-1,1)區域內,相鄰模糊子集交集的最大隸屬度的大小對控制器的效果影響較大,為簡化運算,一般使用三角形或梯形的隸屬度函數。本文結合永磁同步電機調速系統特殊性能要求,提出非等幅對稱隸屬度空間,隸屬度函數曲線如圖2所示。
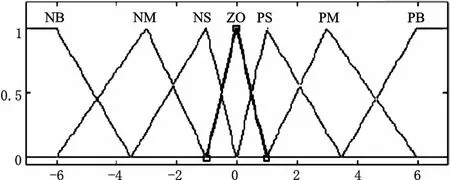
圖2 輸入/輸出變量隸屬度函數曲線
根據圖2給出的隸屬度函數曲線,對輸入變量的精確值進行模糊化之后,輸出語言變量的語言值均取為“負大”(NB)、“負中”(NM)、“負小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)7種。
本設計中所用的模糊規則是根據電機精確數學模型建立母版,然后按照控制經驗與仿真測試進行局部規則修正得出,將這些語言控制規則用表1、表2表示出來[4]。
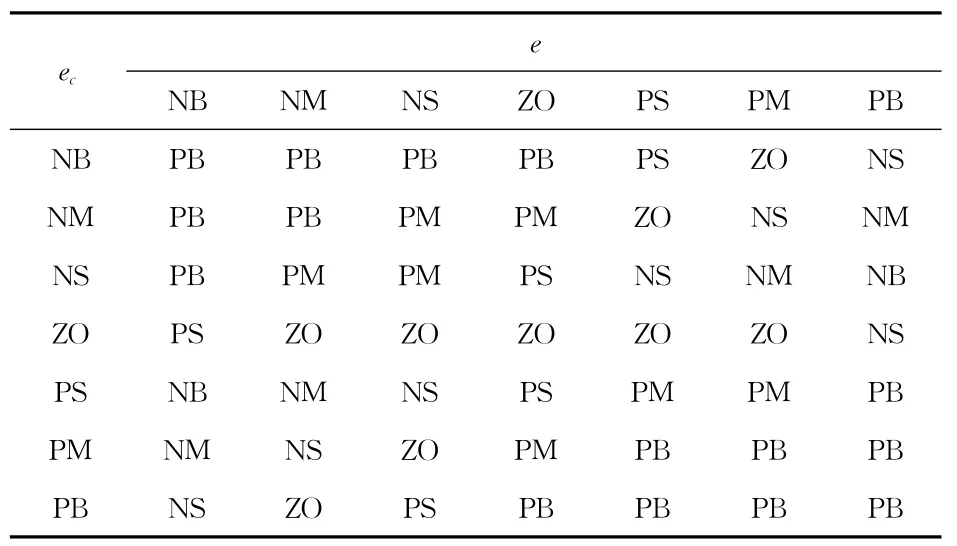
表1 ΔK P模糊控制規則
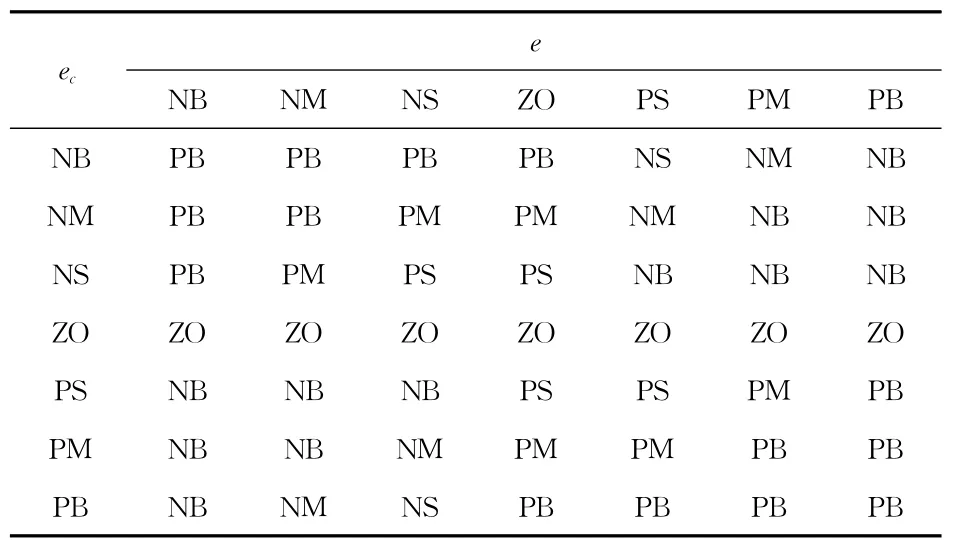
表2 ΔK I模糊控制規則
表1、表2表述了通過輸入量差值和輸入量差值變化率如何在線對ΔKP和ΔKI進行調整的模糊控制規則。例如,當控制量的誤差為正大,而且誤差變化率也為正大,那么根據控制規則要對KP,KI的值進行在線修改。KP應當取較大值,以提高響應的快速性,而KI在控制過程的引入原目的是消除穩態誤差,但其對控制系統的動態性能也存在影響,為防止瞬時過大控制超調,KI應該取值很小,使得電機轉速迅速向給定值靠攏。
利用Matlab中的三維繪圖工具可以將表1、表2中的模糊控制規則擬合成更為直觀的三維模糊控制輸出曲面進行標示,三維模糊控制輸出曲面如圖3所示。
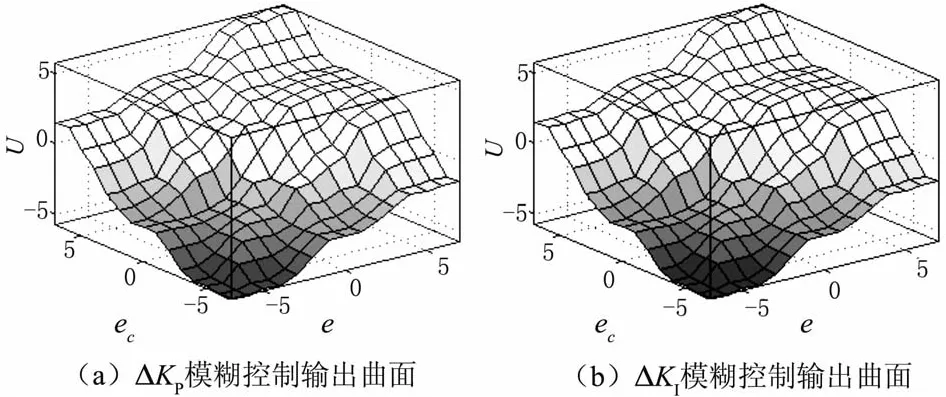
圖3 三維模糊控制輸出曲面
模糊量需要轉換為精確量才可以對系統進行控制,把模糊量轉換為精確量的過程稱為解模糊[5]。常用的解模糊方法包括最大隸屬度法和重心法。本文采用重心法,該方法相比于其他解模糊算法輸出更為平滑,且計算方法更有利于數字實現,其計算公式如下[6]:
3 仿真及實驗分析
在Matlab環境下搭建本文提出的基于模糊PI控制的PMSM調速系統仿真模型并進行仿真驗證,參數為:直流側采用理想直流電壓源供電,母線電壓設定為540 V,約為采用有效值380 V的標準進線電壓,永磁同步電機定子電阻Rs=0.78Ω,d軸等效電感Ld=5.5 m H,q軸等效電感Lq=8.5 m H,轉子磁鏈ψf=0.3 Wb,轉動慣量J=0.001 07 kg·m2,極對數Np=2。
圖4給出了模糊PI控制下永磁同步電機調速系統仿真波形。圖4(a)為負載發生變化時d、q軸電流解耦的控制效果,圖4(b)表述了啟動、負載擾動和轉速指令突然變化時速度的跟蹤情況,因此不難看出模糊PI控制具有良好的動態響應和解耦控制效果。
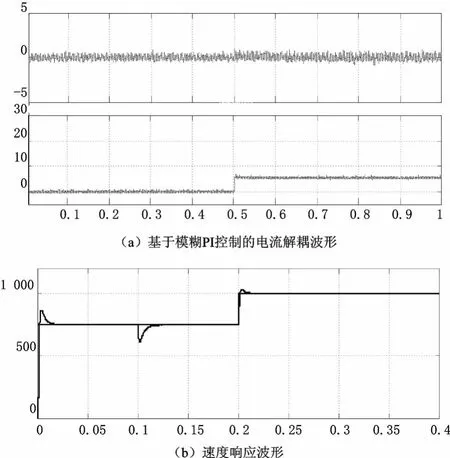
圖4 PMSM控制系統的仿真波形
在仿真的基礎上搭建實驗平臺,對基于模糊PI控制的永磁同步電機調速系統算法的可行性進行進一步實驗驗證。圖5給出了實驗波形。
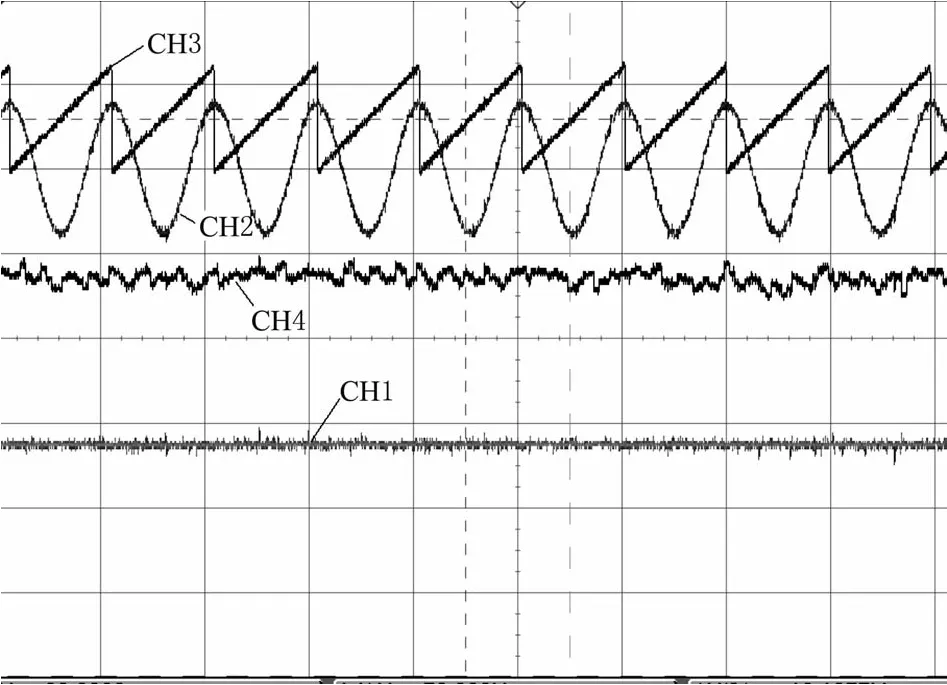
圖5 基于模糊PI控制的PMSM實驗波形
4 結語
本文主要研究基于模糊PI控制的永磁同步電機矢量控制系統,將傳統矢量調速系統中的PI控制器改為模糊控制與PI控制相結合的方式。根據模糊控制的基本原理分別對控制系統的轉速外環和電流內環的模糊PI控制器的設計做了詳細分析。仿真和實驗結果表明,采用模糊PI控制的永磁同步電機調速系統獲得了較好的動、靜態性能。
[1]唐任遠.現代永磁電機理論與設計[M].機械工業出版社,2000
[2]王樹青.先進控制技術及應用[M].化學工業出版社,2001
[3]張井崗,吳聚華,曾建潮.模型參考自適應內模控制及其仿真研究[J].系統仿真學報,1997(2)
[4]張小新.高性能永磁同步電機矢量控制系統的研究[D].哈爾濱理工大學,2009
[5]楊向宇,蔡曉銘,姚佳.基于模糊PI控制的永磁同步電動機伺服控制器設計[J].華南理工大學學報:自然科學版,2004(11)
[6]肖楊柳,周臘吾,黃守道,等.基于自適應模糊PI的PMSM定子電流最優控制[J].電力電子技術,2010(4)
2014-10-08
梁新濤(1977—),男,陜西彬縣人,工程師,從事機電技術管理工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45