波浪能直接驅(qū)動(dòng)機(jī)動(dòng)浮標(biāo)的推進(jìn)機(jī)構(gòu)設(shè)計(jì)*
2014-10-16 07:22:16常宗瑜常東輝鄭中強(qiáng)
常宗瑜,戴 源,常東輝,鄭中強(qiáng)
(1.中國海洋大學(xué)工程學(xué)院,山東 青島266100;2.山東煙臺(tái)利達(dá)木工機(jī)械有限公司,山東 煙臺(tái)264100)
海洋生態(tài)環(huán)境監(jiān)測(cè)技術(shù)和設(shè)備是《國家中長期科學(xué)和技術(shù)發(fā)展規(guī)劃綱要(2006—2020)》指出的海洋研究的重點(diǎn)領(lǐng)域和優(yōu)先主題,浮標(biāo)、潛標(biāo)及水下移動(dòng)平臺(tái)、水面調(diào)查船、海底觀測(cè)站以及衛(wèi)星和航空遙感組成了立體海洋觀測(cè)系統(tǒng),可以獲取的大范圍、全天候、連續(xù)和長時(shí)間的序列的海洋觀測(cè)資料。
在各類立體海洋觀測(cè)系統(tǒng)中,浮標(biāo)系統(tǒng)是重要的海洋環(huán)境觀測(cè)裝備,具有在惡劣的海洋環(huán)境下,長時(shí)間全天候、連續(xù)、自動(dòng)地對(duì)海洋氣象、水文環(huán)境進(jìn)行觀測(cè)等優(yōu)點(diǎn),是海洋觀測(cè)岸基站、調(diào)查船和調(diào)查飛機(jī)在空間和時(shí)間上的拓展,具有其他調(diào)查方法無法替代的優(yōu)點(diǎn),在海洋觀測(cè)中發(fā)揮著巨大的作用。但是浮標(biāo)布放之后只能在固定站位開展觀測(cè),得到站位附近的海洋觀測(cè)要素,重新定位布放需要船只、人員大量消耗。建立自主控制的移動(dòng)海洋監(jiān)測(cè)平臺(tái)是海洋學(xué)家深入研究海洋環(huán)境的迫切需求,最近國外研究機(jī)構(gòu)和學(xué)者提出了機(jī)動(dòng)海洋浮標(biāo)的概念。文獻(xiàn)[1]開發(fā)了一種用于河流和淺海的機(jī)動(dòng)浮標(biāo) Autonomous Surface Mobile Vehicle(ASMV),它可以監(jiān)測(cè)給定的位置和路徑的海洋環(huán)境,并可以根據(jù)指令自主解錨和錨定,如圖1(a)所示;文獻(xiàn)[2]開發(fā)了一種海洋機(jī)動(dòng)浮標(biāo) OASIS(Ocean Atmosphere Sensor Integration System),具有監(jiān)測(cè)海-氣界面通量、赤藻發(fā)生及其他氣象和水文資料的功能,如圖1(b)所示;文獻(xiàn)[3]開發(fā)的Scout浮標(biāo)可以通過螺旋槳和導(dǎo)航控制實(shí)現(xiàn)給定站點(diǎn)的環(huán)境監(jiān)測(cè)任務(wù),如圖1(c)所示;文獻(xiàn)[4]提出了一種可以追蹤溢油的機(jī)動(dòng)浮標(biāo)(Spilled Oil Tracking Autonomous Buoy),如圖1(d)。此外還有已廣泛應(yīng)用的ROV和AUV等。這些非漂浮的機(jī)動(dòng)浮標(biāo)都需要自帶能源供應(yīng),能量供給的限制大大阻礙了移動(dòng)監(jiān)測(cè)平臺(tái)在長時(shí)間大范圍內(nèi)的監(jiān)測(cè)活動(dòng)。
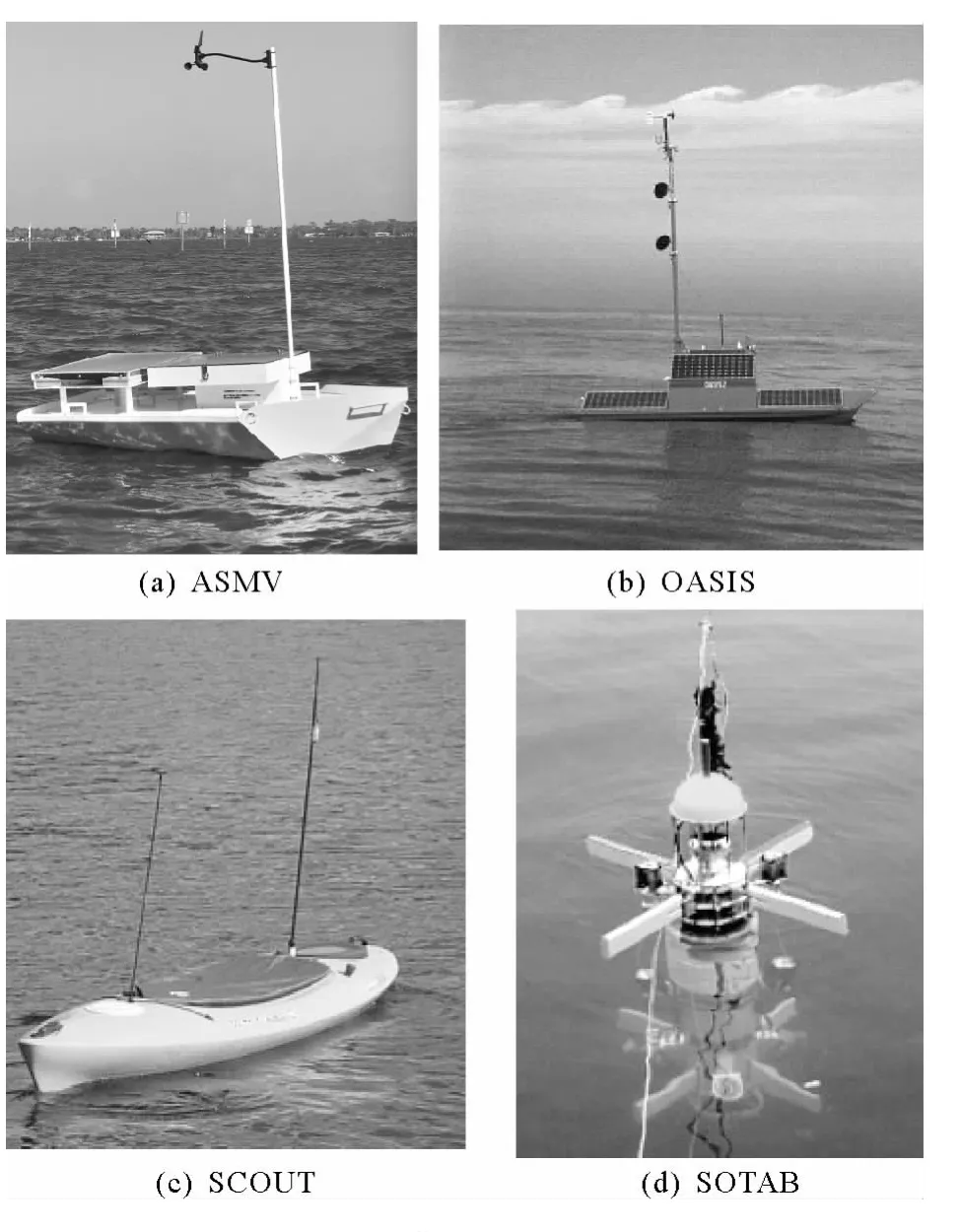
圖1 典型機(jī)動(dòng)浮標(biāo)Fig.1 The typical mobile buoy
本文提出了一種能夠利用波浪能驅(qū)動(dòng)的機(jī)動(dòng)浮標(biāo),它可以利用波浪的升沉振蕩轉(zhuǎn)化為向前運(yùn)動(dòng)。文中介紹了該浮標(biāo)的工作原理,給出了該機(jī)構(gòu)的設(shè)計(jì)方案和樣機(jī),并對(duì)該浮標(biāo)進(jìn)行了海上試驗(yàn),試驗(yàn)表明該機(jī)構(gòu)可以順利在波浪作用下前進(jìn)。
1 基本原理
海洋中的波浪經(jīng)久不息地做著起伏運(yùn)動(dòng),海水中的每個(gè)水質(zhì)點(diǎn)的運(yùn)動(dòng)主要以垂蕩運(yùn)動(dòng)為主,輔以小幅度的水平運(yùn)動(dòng),而且隨著深度的增加波浪的振動(dòng)情況會(huì)大大減少,波浪水質(zhì)點(diǎn)的運(yùn)動(dòng)以及與水深的關(guān)系如圖2所示。
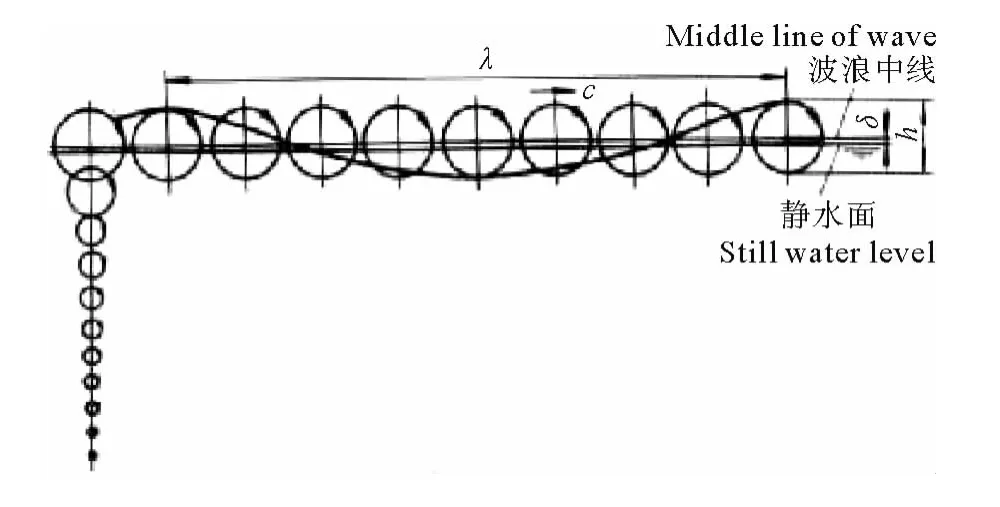
圖2 波浪質(zhì)點(diǎn)的運(yùn)動(dòng)Fig.2 The motion of the wave particle
本文敘述的機(jī)動(dòng)浮標(biāo)就是利用了海洋表面的波浪垂蕩運(yùn)動(dòng)來作為推動(dòng)機(jī)動(dòng)浮標(biāo)的動(dòng)力,其工作機(jī)理如圖3所示。從圖上可以看到,當(dāng)機(jī)動(dòng)浮標(biāo)處于靜水中時(shí),水下推進(jìn)裝置處于水平狀態(tài),圖3(a)所示,當(dāng)水面浮體在波浪的作用下向上移動(dòng)的時(shí)候,葉片順時(shí)針旋轉(zhuǎn),相對(duì)水流垂直向下作用在葉片上,分解為垂直于葉片的法向力和沿著葉片的切向力,其中法向力就會(huì)產(chǎn)生推動(dòng)葉片向前移動(dòng)的一個(gè)推力,如圖3(b)所示。
同樣道理,當(dāng)水面浮體在波浪作用下向下運(yùn)動(dòng)時(shí),葉片逆時(shí)針轉(zhuǎn)動(dòng),水流作用下垂直向上作用在葉片上,分解為向上的法向力和沿著葉片的切向力,同樣法向力也會(huì)產(chǎn)生推動(dòng)葉片向前移動(dòng)的推力,如圖3(c)所示。
這種情況類似于在飛行過程機(jī)翼所產(chǎn)生的升力,只不過機(jī)動(dòng)浮標(biāo)中速度方向?yàn)榇怪狈较颍a(chǎn)生的升力是水平向上。
由此,通過機(jī)構(gòu)的巧妙設(shè)計(jì)實(shí)現(xiàn)了無論在波浪推動(dòng)浮標(biāo)上下運(yùn)動(dòng)時(shí)都能產(chǎn)生向前的推動(dòng)力,實(shí)現(xiàn)了對(duì)載體的無動(dòng)力、全靜音驅(qū)動(dòng)。而且從波浪驅(qū)動(dòng)機(jī)動(dòng)浮標(biāo)的原理可以看出,隨著波浪振蕩幅值的增加,水上浮體拉動(dòng)水下推進(jìn)裝置的幅度增加,推進(jìn)的速度進(jìn)一步加快,因此在高海況條件下,不僅不會(huì)影響機(jī)動(dòng)浮標(biāo)的使用,而且會(huì)令機(jī)動(dòng)浮標(biāo)有更快的速度。
2 波浪驅(qū)動(dòng)機(jī)動(dòng)浮標(biāo)的設(shè)計(jì)
根據(jù)上述波浪驅(qū)動(dòng)機(jī)動(dòng)浮標(biāo)運(yùn)動(dòng)機(jī)理,對(duì)波浪驅(qū)動(dòng)浮標(biāo)進(jìn)行設(shè)計(jì),浮標(biāo)的示意圖如圖4所示。其中1為水面浮體,2為水下推進(jìn)裝置,二者之間為連接的纜索3,其中水面浮體上主要構(gòu)件為浮體和舵板4。
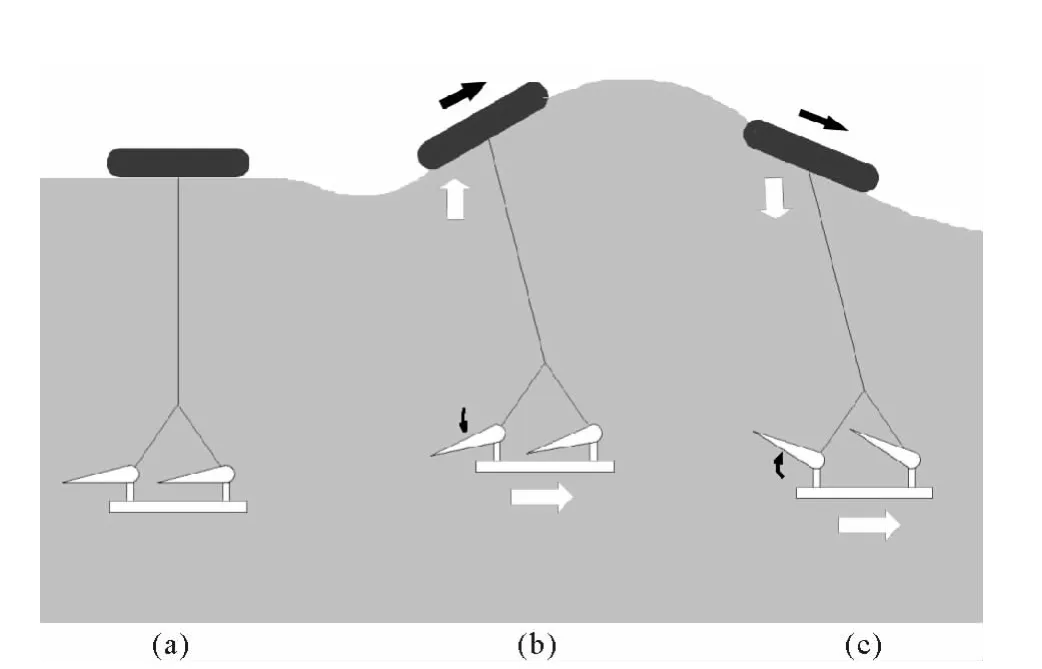
圖3 仿生機(jī)動(dòng)浮標(biāo)的工作原理Fig.3 The principle of bionic mobile buoy
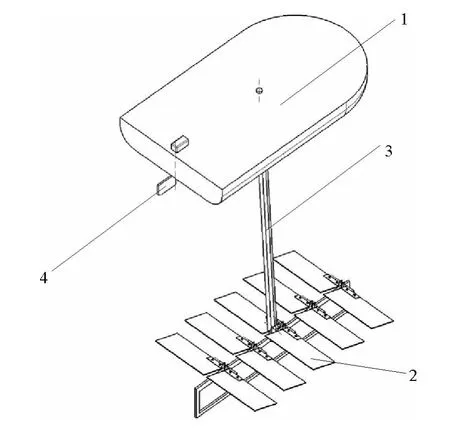
圖4 機(jī)動(dòng)浮標(biāo)總體示意圖Fig.4 The sketch map of mobile buoy
水面浮體的尺寸為900mm×600mm×70mm,采用薄鋼板包絡(luò)的泡沫浮體材料。連接上浮體與水下推進(jìn)機(jī)構(gòu)的繩索長度為4m,水下推進(jìn)機(jī)構(gòu)總長度大約為800mm。水下推進(jìn)機(jī)構(gòu)是整個(gè)裝置的動(dòng)力源和核心機(jī)構(gòu)。如圖5所示,整個(gè)水下推進(jìn)機(jī)構(gòu)由推進(jìn)機(jī)構(gòu)基體、擺桿、連桿和翼片組成,10片翼片連接在10個(gè)擺桿的連接體處,對(duì)稱分布在基體的兩端,擺桿和連桿組成平行四邊形機(jī)構(gòu),保證五組翼板同步。翼片尺寸為400 mm×100mm×3mm。除去翼片采用有機(jī)玻璃板、浮體外,其他構(gòu)件均為316不銹鋼。葉片組數(shù)可以根據(jù)結(jié)構(gòu)的復(fù)雜程度加以增減。
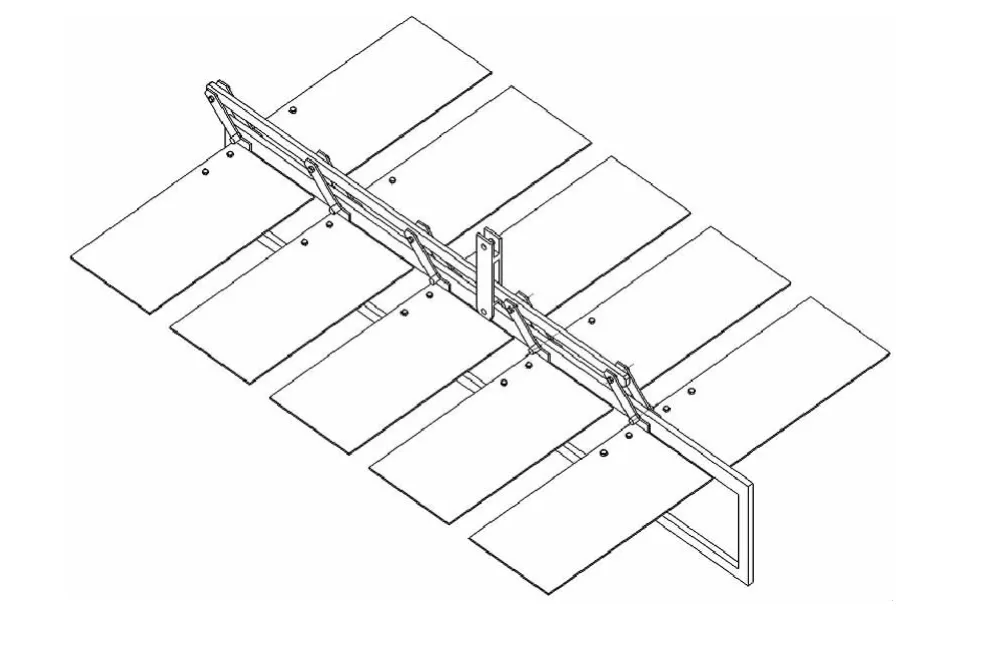
圖5 水下推進(jìn)裝置示意圖Fig.5 The sketch map of underwater propulsion device
3 實(shí)驗(yàn)研究
根據(jù)上述原理和設(shè)計(jì)圖紙,制作了機(jī)動(dòng)浮標(biāo)的樣機(jī),其結(jié)構(gòu)如圖6所示。波浪作用在水面浮體上,通過纜索帶動(dòng)水下推進(jìn)機(jī)構(gòu)葉片的擺動(dòng),使整個(gè)裝置向前緩慢移動(dòng),水面浮體的方向舵用于控制機(jī)動(dòng)浮標(biāo)的行進(jìn)方向,由計(jì)算機(jī)遠(yuǎn)程控制。水面浮體的運(yùn)動(dòng)參數(shù)和方向舵的轉(zhuǎn)角通過傳感器檢測(cè)通過無線傳輸給計(jì)算機(jī)。此外有水下攝像機(jī)對(duì)水下推進(jìn)機(jī)構(gòu)葉片的運(yùn)動(dòng)進(jìn)行觀測(cè)。
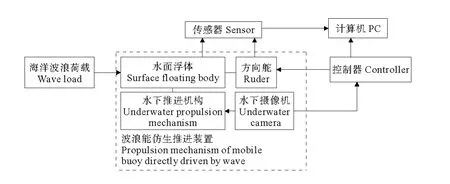
圖6 波浪能驅(qū)動(dòng)機(jī)動(dòng)浮標(biāo)系統(tǒng)Fig.6 The system of mobile buoy directly driven by wave
根據(jù)上述原理和設(shè)計(jì)圖紙,制作一個(gè)小型機(jī)動(dòng)浮標(biāo)的樣機(jī),其各個(gè)主要尺寸和材料見表1。
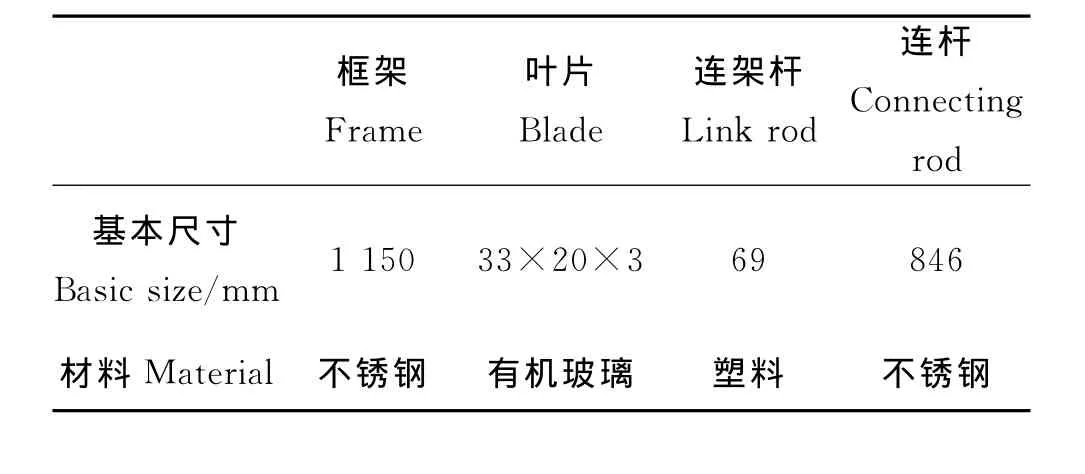
表1 小型機(jī)動(dòng)浮標(biāo)的樣機(jī)參數(shù)Table 1 The parameter of physical prototype of mobile buoy
制作的水下推進(jìn)裝置實(shí)驗(yàn)樣機(jī)見圖7。
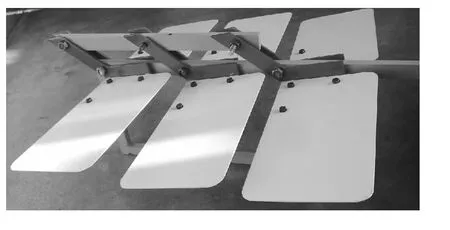
圖7 水下推進(jìn)機(jī)構(gòu)Fig.7 The divce of underwater propulsor
利用該實(shí)驗(yàn)樣機(jī)進(jìn)行了海試。為監(jiān)測(cè)水下推進(jìn)裝置的翼片運(yùn)動(dòng)情況,在纜索下端安裝水下攝像機(jī)。在煙臺(tái)養(yǎng)馬島水域進(jìn)行了實(shí)驗(yàn),通過實(shí)驗(yàn)發(fā)現(xiàn)隨著波浪的起伏,機(jī)動(dòng)浮標(biāo)緩慢向前移動(dòng)(見圖8),通過水下攝像機(jī)發(fā)現(xiàn)翼片隨著波浪做顯著擺動(dòng)。實(shí)驗(yàn)初步證明本設(shè)計(jì)原理和樣機(jī)是有效的。

圖8 仿生推進(jìn)裝置海試圖(截圖自錄像資料)Fig.8 The experiment of underwater propulsion device in sea
4 結(jié)語
本文設(shè)計(jì)了一種新型波浪能驅(qū)動(dòng)的機(jī)動(dòng)浮標(biāo),該浮標(biāo)由水面浮體和水下推進(jìn)機(jī)構(gòu)兩部分組成,水下推進(jìn)機(jī)構(gòu)可以將波浪垂蕩振動(dòng)轉(zhuǎn)化為前進(jìn)的動(dòng)力,本文介紹了該浮標(biāo)的結(jié)構(gòu)和工作原理,給出了設(shè)計(jì)方案,并進(jìn)行了海試,實(shí)驗(yàn)結(jié)果表明文中設(shè)計(jì)的機(jī)動(dòng)浮標(biāo)系統(tǒng)可以在波浪的作用下實(shí)現(xiàn)有效的前進(jìn)運(yùn)動(dòng),輔以遠(yuǎn)程控制舵板等機(jī)構(gòu)可以實(shí)現(xiàn)有控制的巡航。本文提出的機(jī)動(dòng)浮標(biāo)方案為了開展物理海洋環(huán)境、海洋生態(tài)、海洋污染的提供一種有效儀器搭載工具。
[1] Orton P M,Gillis W R,Moisan J R,et al.The Mobile Buoy:An Autonomous Surface Vehicle for Integrated Ocean-Atmosphere Studies[C].Washington:American Geophysical Union,Spring Meeting,2009.
[2] Wood S,Rees M,Pfeiffer Z.An Autonomous Self-Mooring Vehicle for Littoral & Coastal Observations[C].Aberdeen:IEEE O-ceans,2007:1-6.
[3] Curcio J,McGillivary P A,F(xiàn)all K,et al.Self-Positioning Smart Buoys,The “Un-Buoy”Solution:Logistic Considerations using Autonomous Surface Craft Technology and Improved Communications Infrastructure[C].Boston:IEEE Oceans,2006:18-22.
[4] Muneo Yoshie,Yoshitaka Matsuzaki,Isamu Fujita.At-sea Trial Test of an Autonomous Buoy which Tracks Drifting Oil and Observation of In-Situ Data Tracking Drifting Markers on the Sea for Predicting Location of the Spilled Heavy Oil[C].Osaka:Proceedings of the Nineteenth(2009)International Offshore and Polar Engineering Conference,2009.
[5] Antonelli G.Underwater robots:Motion and force control of vehicle manipulator systems[M].Berlin:Springer,2003.
[6] Wang Xiaoming,Shang Jianzhong,Luo Zirong,et al.Reviews of power systems and environmental energy conversion for unmanned underwater vehicles[J].Renewable and sustainable Energy Reviews,2012,43(16):1958-1970.
[7] 常宗瑜.波 浪 驅(qū) 動(dòng) 的 機(jī) 動(dòng) 浮 標(biāo): 實(shí) 用 新 型 專 利 [P].201220583004.3.
