軸帶雙饋發電機的空載并網控制和功率解耦控制仿真研究
2014-10-17 05:20:38馮玉龍
機電設備 2014年1期
關鍵詞:發電機
馮玉龍,艾 鋼
● (中國船舶重工集團公司第七一一研究所,上海 201108)
軸帶雙饋發電機的空載并網控制和功率解耦控制仿真研究
馮玉龍,艾 鋼
● (中國船舶重工集團公司第七一一研究所,上海 201108)
對船舶軸帶雙饋發電機的數學模型和控制方式進行了詳細探討,研究了船舶軸帶雙饋發電機的空載并網控制和功率解耦控制兩種控制策略,并在Matlab/Simulink環境下,搭建了兩種控制模式下的雙饋發電仿真系統,對軸帶雙饋發電系統的相關動態和靜態特性進行了仿真和分析。結果表明:軸帶雙饋發電機在空載并網控制模式下具有良好的跟隨參考電壓特性,在功率解耦控制模式下具有良好的功率解耦特性,對有功功率和無功功率給定能夠快速響應,穩態誤差被控制在較小范圍內。
軸帶發電機;雙饋發電機;空載并網;功率解耦
0 引言
軸帶發電機是由主機驅動發電機的供電裝置,能夠充分利用主機的剩余功率發電,大幅度降低燃油消耗量,是一種有效的節能方式。目前,船舶主機大多采用定距槳,這種船舶在航行狀態時,為了改變航速,主機的轉速甚至轉向都是可變的。為了使軸帶發電機實現變速恒頻運行,必須使用頻率補償裝置。近年來,采用燃氣輪機和采用混合動力的船舶逐漸增多,而燃氣輪機通常采用功率控制模式,因此,研究雙饋發電機的功率解耦控制很有價值。文獻[1-4]研究了雙饋發電機在風力發電中的應用和控制,文獻[5]對獨立運行的雙饋發電機進行了研究,本文對雙饋發電機在船舶軸帶發電機中的應用和控制特性做了研究。
1 雙饋發電機的數學模型和控制系統模型
雙饋感應電機在結構上類似于繞線式感應電動機。它的定子與電網連接、轉子通過變頻器供電。規定將定子電壓、電流方向取為發電機慣例,轉子側取為電動機慣例。
將同步旋轉d-q坐標系d軸選定在定子磁鏈上,如圖1所示。d-q坐標系以同步速ωs旋轉,d軸精確定位于發電機定子磁鏈矢量ψs的方向上,α1-β1坐標系為定子兩相靜止坐標系,α2-β2坐標系為轉子兩相靜止坐標系,α1、α2軸分別與定子A相和轉子a相軸線正方向同向,所以α2-β2坐標系相對于α1-β1坐標系以轉子角速度ωr旋轉,轉差角速度記為:

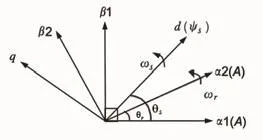
圖1 坐標變換示意圖
1.1 同步旋轉坐標系雙饋電機的數學模型
坐標變換中采用恒功率變換,得到同步旋轉坐標系的數學模型:
磁鏈方程:

式中:Ls、Lr、Lm分別為經過坐標變換后等效的定子自感、等效轉子自感和等效互感;ψ、i分別代表磁鏈和電流值;下標d、q分別代表該物理量在d、q軸的分量;下標s、r分別代表定子和轉子上的物理量,以下各式同樣按此規則標注。
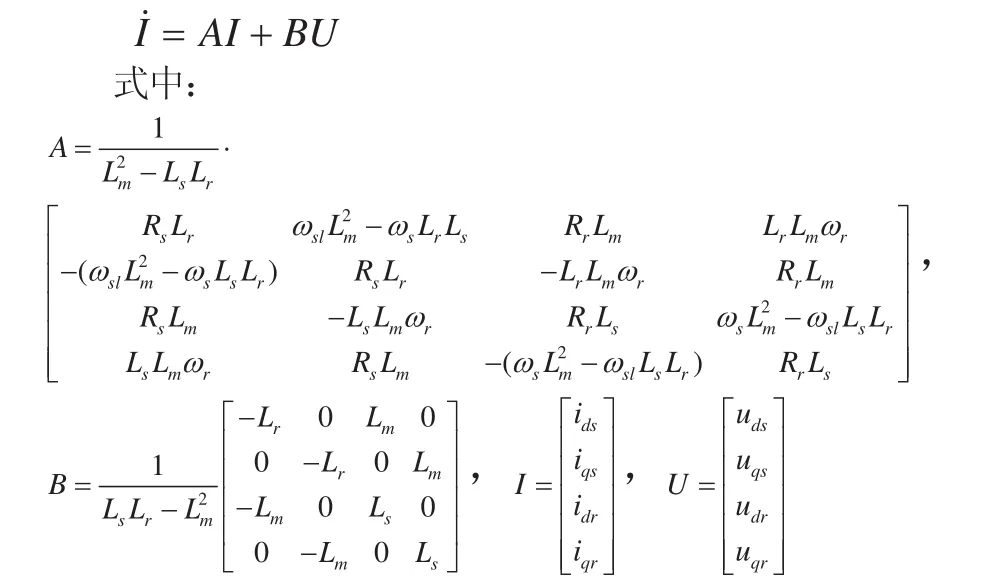
將式(1)轉換得到電壓方程:

式中:u為交流供電電壓;Rs、Rr分別為定子、轉子側阻抗;p代表微分算子。
可以將上式改寫成狀態空間表達式,便于在Matlab/Simulink中建立相應的仿真模型:
考慮在空載狀態下有限制條件:

進而有空載條件下的電壓方程:
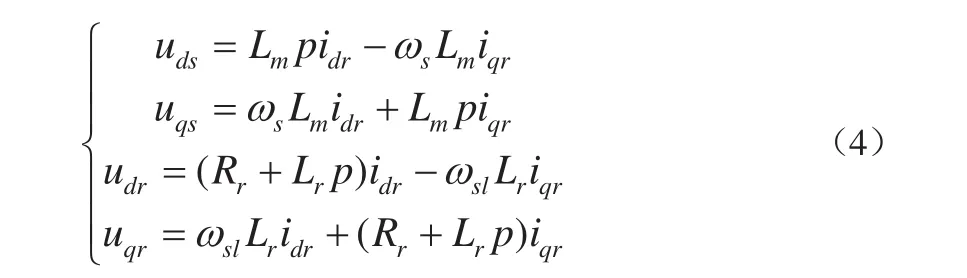
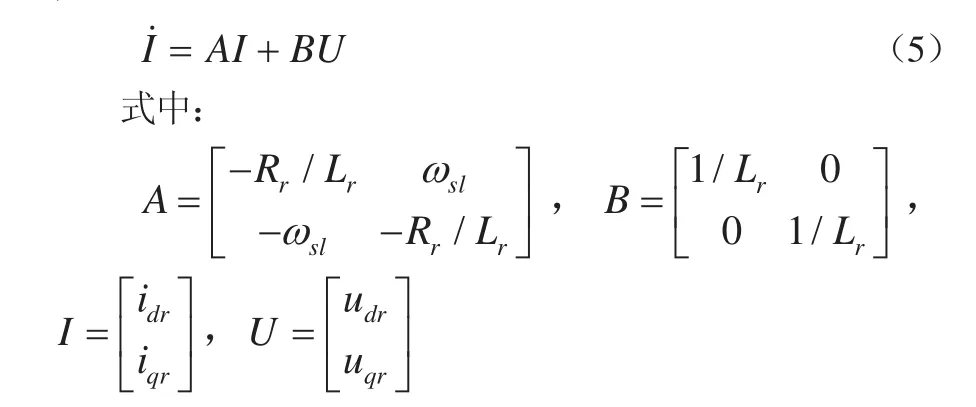
根據式(6)可以得到空載時的雙饋電機空間狀態方程:
大多數自然和人造系統都能描述為網絡,其中實體通過物理或者抽象邊連接,這迅速增加了人們對網絡理論及其應用領域的研究興趣 [1-3].基礎設施系統,如電力網、因特網、車輛運輸系統、航空網等都是網絡實例,這些網絡給人們的生活提供了極大的便利.然而,在這些網絡中,非常局部的攻擊或隨機故障就能引發整個網絡的級聯崩潰,造成嚴重經濟損失和社會混亂.典型的例子如,發生在美國、加拿大、意大利、印度、中國等國家的數次大規模停電[4],因特網崩潰以及一些大城市頻繁的交通癱瘓[5].在此背景下,網絡應對攻擊和隨機故障引發的級聯故障的魯棒性和安全性一直是網絡科學領域的研究熱點.
1.2 定子磁鏈定向條件下雙饋發電機的控制系統模型
1.2.1 雙饋發電機的功率解耦控制
當原動機功率受到限制或者原動機采用功率控制時,軸發適合采用功率解耦控制,且功率解耦控制可以實現對有功功率和無功功率的單獨控制,對電網的無功補償同樣具有重要意義。
定子磁鏈空間矢量定向,則有約束條件:

雙饋發電機正常工況運行時,定子繞組電阻上的壓降相對于電網電壓而言很小,可以忽略不計。如果定子磁鏈ψs保持恒定,則由電壓方程式(2)得到:

式中:ψs、us分別為合成磁鏈矢量和合成電壓矢量。
由式(6)可知,定子電壓矢量的d軸分量接近于0,此時定子磁鏈與定子電壓矢量近似相互垂直,且存在如下關系式:ψs=us /ωs,θs=θu-π/2。
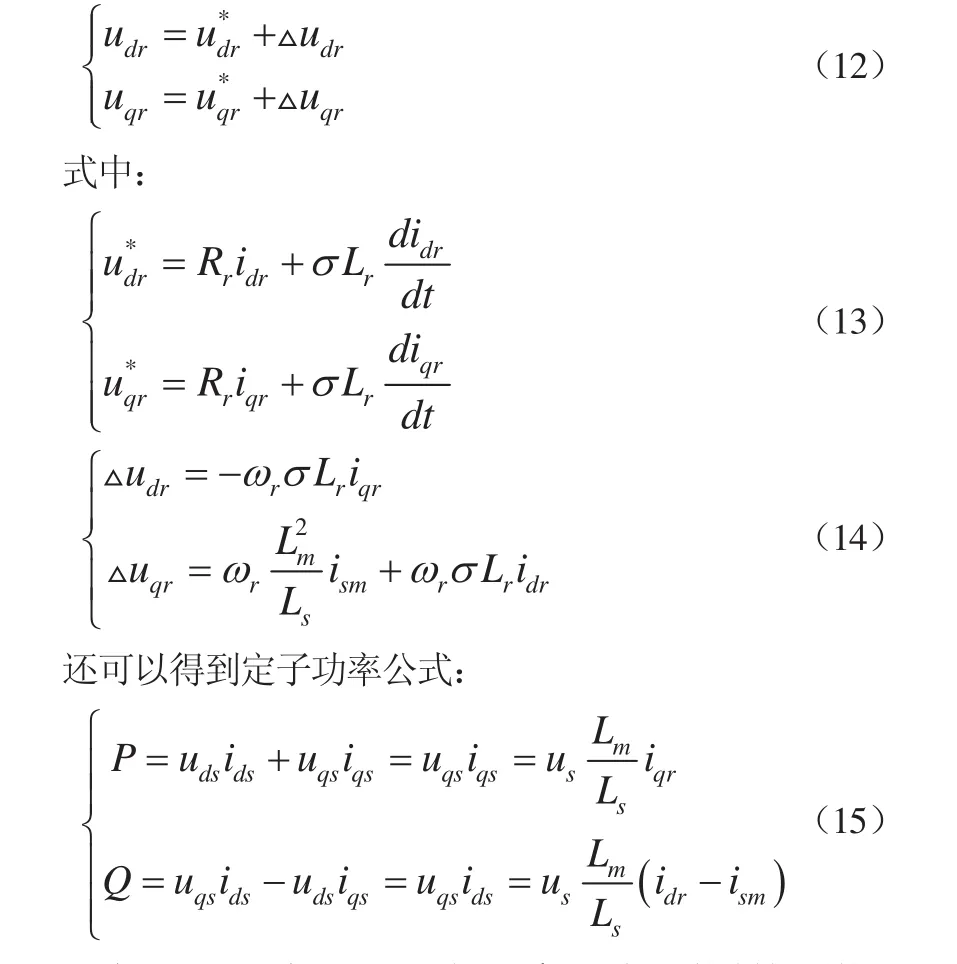
同時由式(6)可以得到:
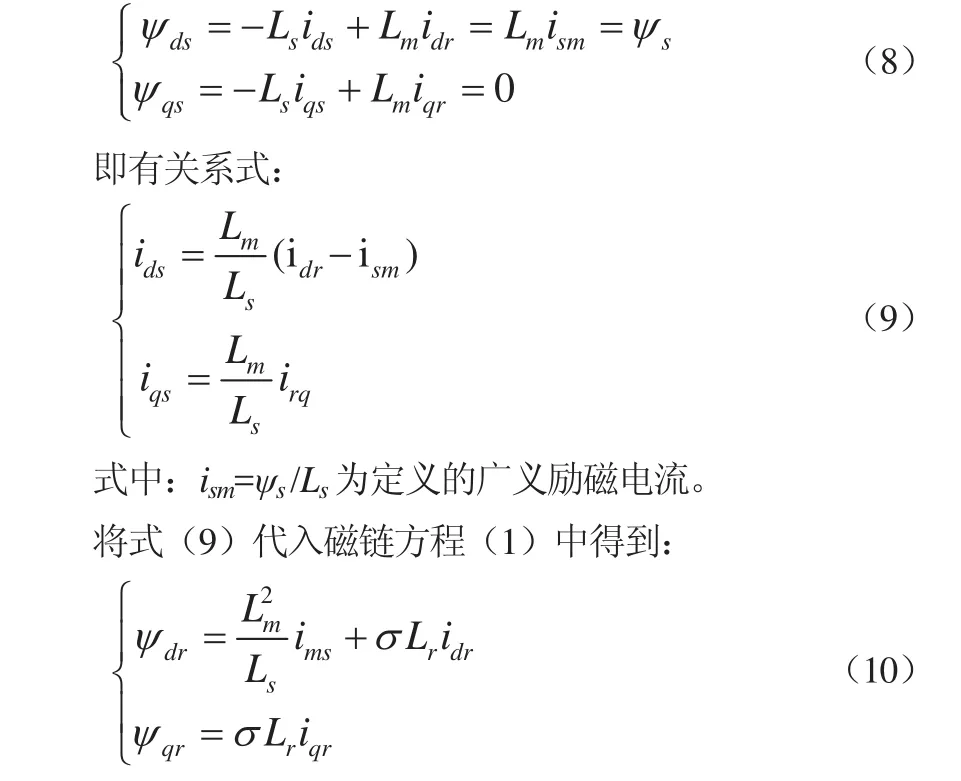
其中定義漏磁系數σ=1-[L2m/(LsLr)]。

將式(11)分解為兩部分分別作為控制器輸出和前饋解耦控制輸出:
由式(13)和式(14)可得,采用雙閉環控制得到的雙饋發電機轉子側功率解耦控制系統框圖如2所示。
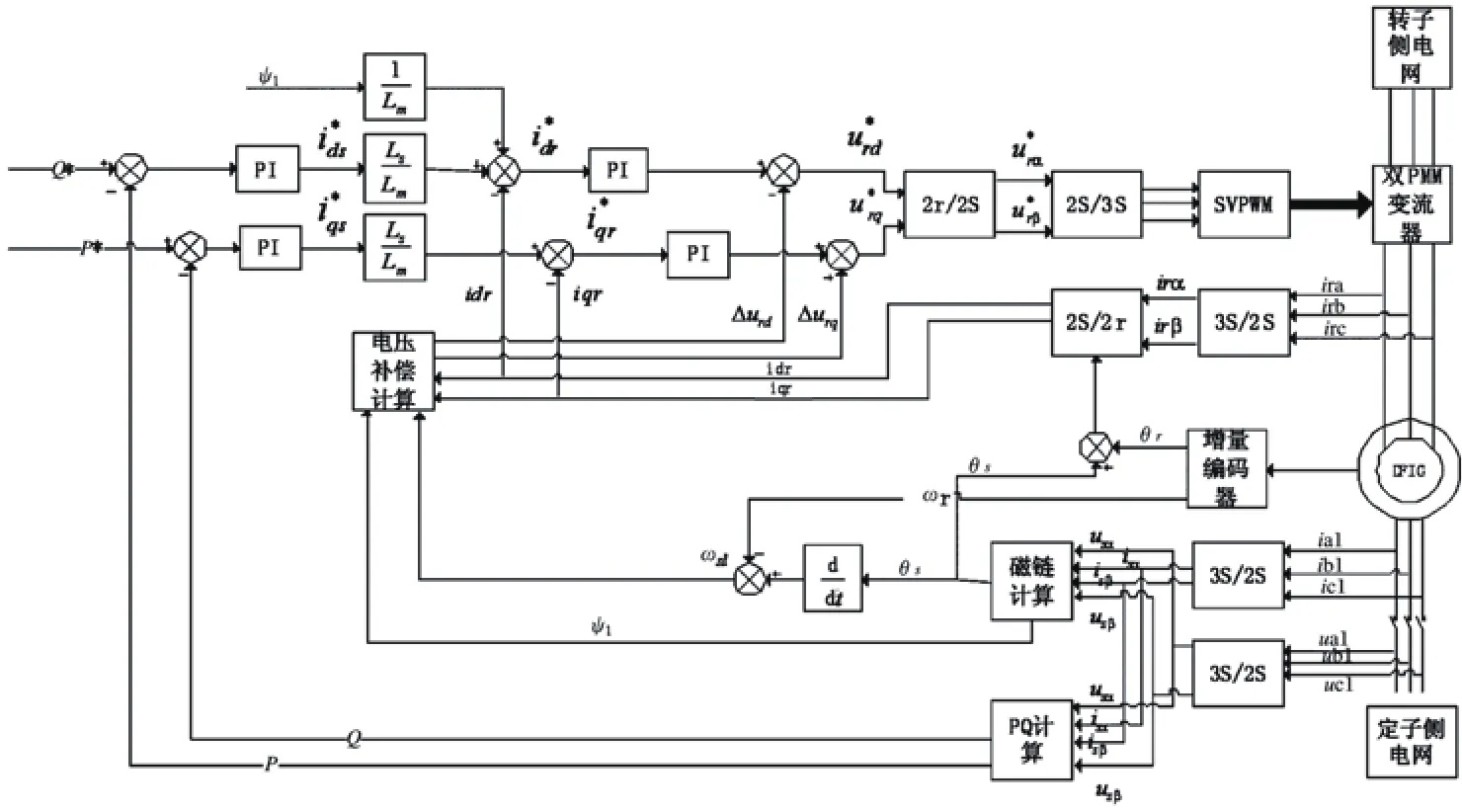
圖2 雙饋電機功率解耦控制系統
1.2.2 雙饋發電機的空載并網控制
軸帶發電機通常需要船舶柴發機組進行并網運行,軸帶雙饋發電機的并網分為空載并網和帶載并網,本文采用更易實現的空載并網控制方式。
根據得到的空載并網控制時的電壓公式(4)和磁鏈方程(1)進而可以得到:
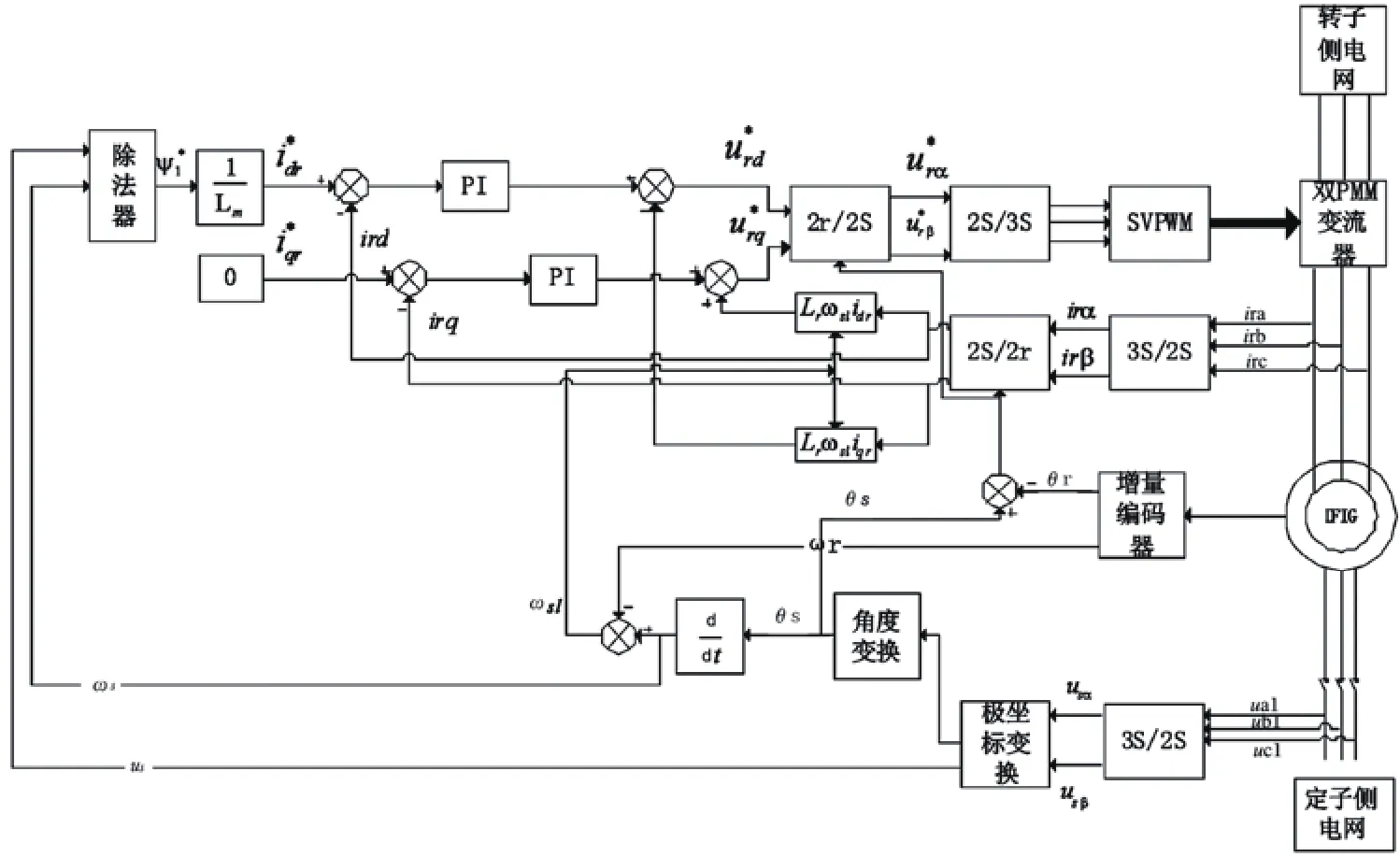
圖3 雙饋電機空載并網控制系統
可以采用式(17)確定的關系進行轉子側控制,但考慮實際動態調節過程中磁場定向誤差,iqr可能不為零,故可以根據式(4)進行補償,得到空載并網時雙饋發電系統的控制框如圖3所示。
2 軸帶雙饋發電系統的綜合仿真
根據雙饋電機在空載條件和帶載條件下的數學關系,在matlab中分別編寫了相應的S函數作為仿真對象模型,根據上文得到空載并網控制模型和功率解耦控制模型,在Matlab/Simulink中搭建了軸帶雙饋發電機仿真系統。
仿真參數為:發電機額定功率 30kW,額定電壓400V±10%,額定頻率50Hz,額定轉速1800r/min,定子額定功率25kW,定子額定電流36A,調速范圍1000r/min~2000r/min,極對數 2,定子自感Ls=1.1mH,轉子自感Lr=2mH,互感Lm=75.9mH,定子電阻0.25Ω,轉子電阻0.267Ω。將系統參數進行折算和取標幺值后代入系統模型中,轉速給定為1050r/min,并且在系統轉子側加入了一個LCL濾波器以改善電壓波形,得到仿真結果如下:
2.1 軸帶雙饋發電機的空載并網控制仿真
發電機定子電壓與電網電壓波形如圖4所示。發電機定子電壓與電網電壓偏差如圖5所示。發電機轉子電壓波形如圖6所示。發電機定子磁鏈波形如圖7所示。

圖4 發電機定子電壓與電網電壓波形
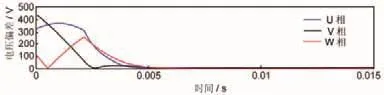
圖5 發電機定子電壓與電網電壓偏差
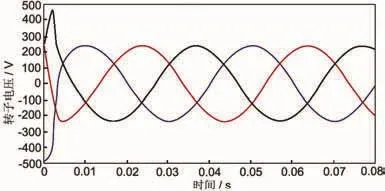
圖6 發電機轉子電壓波形
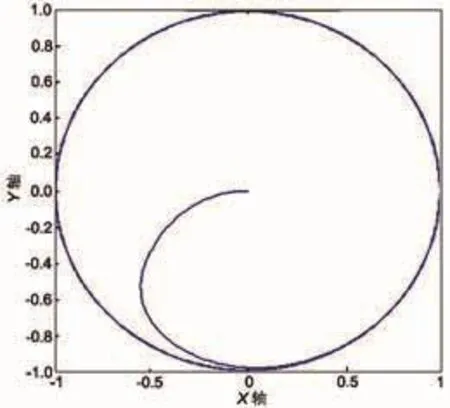
圖7 發電機定子磁鏈波形
2.2 軸帶雙饋發電機的功率解耦控制仿真
設定系統在0.8s時刻并網,控制策略從空載并網控制變換為功率解耦控制,1.2s時刻給定3kw的有功功率指令信號,1.6s時刻給定1kw的無功功率指令信號,仿真結果如圖8~圖11所示。
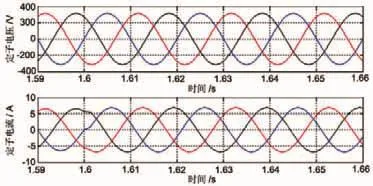
圖9 加載無功指令時發電機定子側電壓電流波形
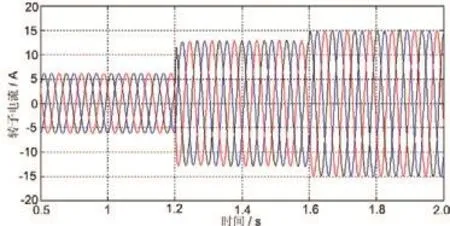
圖10 發電機轉子側電流波形
由圖4、5可以看到,空載并網控制中發電機電壓能較好的跟蹤電網電壓,在1/4周期內實現準確跟蹤,這樣在并網時的沖擊電流就能得到有效控制;圖7表明定子磁鏈按照圓形軌跡運行良好;圖8、9顯示了功率解耦控制時加載有功和無功指令時定子側電壓和電流波形,圖10顯示了功率解耦控制下轉子側電流隨負載的變化情況,波形表明電壓相對保持穩定,轉子側響應迅速并超調很小;圖11進一步表明定子側的有功、無功輸出很好的跟蹤了指令值;整個系統運行過程中具有較好的動態特性且最終穩態誤差較小。

圖11 發電機定子側有功率和無功功率波形
3 結論
本文對軸帶雙饋發電機的空載并網控制和功率解耦控制做了仿真研究,結果表明:
1)軸帶雙饋發電機空載并網過程中能很好地跟蹤電網電壓,能快速、有效地減小發電機電壓和船舶電網電壓之間的誤差,并且頻率穩定,實現順利并網;
2)軸帶雙饋發電機在由空載并網控制模式轉變為功率解耦控制模式的動態過程較為平穩,調節速度較快,穩定后有功功率和無功功率誤差在較小范圍內;
3)軸帶雙饋發電機在功率解耦控制模式下能快速、有效地實現對定子有功功率和無功功率的解耦控制,并且穩態誤差在較小范圍內;
4)軸帶雙饋發電機的功率解耦控制可應用于原動機的功率控制方案中,利于實現動力系統的高效、穩定運行。
[1]劉其輝,賀益康,卞松江,等.變速恒頻風力發電機空載并網控制研究[J].中國電機工程學報,2004,24(3):6-11.
[2]劉其輝,賀益康,張建華,等.變速恒頻風力發電機的運行控制和建模仿真[J].中國電機工程學報,2006,26(5):43-50.
[3]李晶,宋家驊,王偉勝,等.大型變速恒頻風力發電機組建模與仿真[J].中國電機工程學報,2004,24(6):100-105.
[4]胡 文,肖強暉.雙饋風力發電機組空載并網控制策略研究[J].湖南工業大學學報,2012,26(6):25-29.
[5]鄒旭東.變速恒頻交流勵磁雙饋風力發電系統及其控制技術研究[D].武漢:華中科技大學,2005.
Simulation Research on Control of Free-load Grid-connection and Power Decoupling for Doubly Fed Shaft Generator
FENG Yu-long,AI Gang
(Shanghai Marine Diesel Engine Research Institute,Shanghai 201108,China)
The mathematical model and control method of doubly fed shaft generator for ship are amply discussed.The two control strategies of free-load grid-connecting and power decoupling are researched.The simulation system of the doubly fed shaft generator at two control modes is established under Matlab/Simulink environment.The characteristics of relevant dynamic state and static state with the doubly fed shaft generator are simulated and analyzed.The results demonstrate that the doubly fed shaft generator has good performance on tracking the reference voltage under the mode of free-load grid-connection,and has good performance on power decoupling under the mode of power decoupling.It responds to active power and reactive power quickly and the steady-state error is controlled in a small range.
shaft generator; doubly fed induction generator (DFIG); free-load grid-connection; power decoupling
TM31
A
馮玉龍(1989-,男,在讀碩士。研究方向:船船動力裝置。
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45
