惠斯頓杠桿的設計分析
2014-11-06 06:16:14殷洪霞
冶金設備 2014年1期
關鍵詞:活動
殷洪霞
(中冶東方工程技術有限公司 內蒙古包頭 014010)
2006年底包鋼軌梁廠配套建設“型鋼加工線”,其所用的惠斯頓移鋼機是編組區重要的傳輸設備,見圖1和圖2。惠斯頓移鋼機的功能是把運輸輥道上過來的型鋼托起放在鏈式運輸機上,其主要機構就是惠斯頓杠桿,目前在許多工程中都在使用這一機構,本文的目的是分析其結構、工作原理、對這一結構的設計關鍵點、制造、安裝的關鍵環節做一論述,為以后的改進、優化提供理論依據,為施工現場提供一些借鑒。
1 惠斯頓杠桿結構
惠斯頓杠桿(如圖3),由張緊裝置、配重、活動鏈輪、托盤、保護罩等共同組成轉臂裝置(如圖4),然后轉臂裝置和轉軸用鍵固接在一起,這樣轉臂裝置能隨著轉軸同步轉動,其次固定鏈輪和轉軸空套,焊接在軸承座上。目的是使固定鏈輪相對地面靜止。最后鏈條把活動鏈輪和固定鏈輪連接起來,形成惠斯頓杠桿。在轉臂裝置中,活動鏈輪和托盤與小軸以鍵剛性聯結形成一個整體,這個整體再通過軸承和轉臂裝置活動聯結。
2 惠斯頓杠桿的工作原理
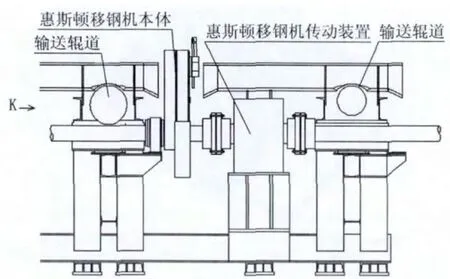
圖1 惠斯頓移鋼機主視圖
惠斯頓杠桿的左側是鏈式運輸機,右側是型鋼的運輸輥道,它的初始位置在輥道的下面,當型鋼在輥道上停下時,惠斯頓杠桿的轉軸在電機、減速電機的驅動下開始轉動,從而帶動托盤托起型鋼,在固定鏈輪和活動鏈輪的傳動比等于1的條件下以及鏈條的拉力控制下,托盤會保存初始的水平狀態隨著轉臂做圓周軌跡的平動,實際上托盤就像行星一樣,既隨著轉臂作公轉,又有自己的自轉。托盤的這兩種運動相互抵消即得到了平動。當托盤轉到左側的鏈式運輸機上時,型鋼就被放在了上面,此時惠斯頓杠桿繼續沿逆時針空轉到輥道的下面,即上個動作的起始點。這時惠斯頓杠桿就完成了一個周期的動作。

圖2 惠斯頓移鋼機左視圖

圖3 惠斯頓杠桿結構示意圖
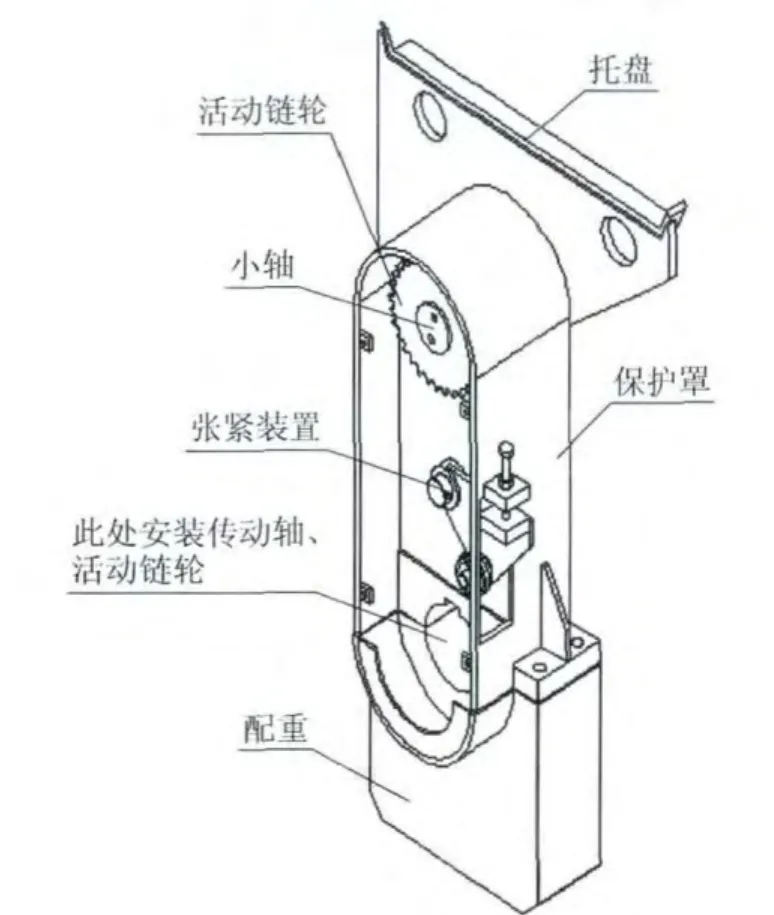
圖4 轉臂裝置三維圖
3 設計惠斯頓杠桿時的幾個關鍵點
3.1 固定鏈輪和活動鏈輪齒數相等
從運動學角度來分析,首先轉軸在電機帶動下以轉速ωe轉動,轉臂裝置與轉軸由鍵剛性聯結,故轉臂裝置也以轉速ωe轉動,即托盤的牽連運動為轉動,又因為托盤以一個小軸通過軸承與轉臂裝置活動聯結,所以,托盤相對于轉臂裝置以角速度ωr相對運動,即托盤的牽連運動也為轉動。由理論力學的知識:剛體繞兩個平行軸轉動合成的結論:當ωe和ωr等值而反向時剛體繞瞬時軸轉動的角速度ωa=0,即當剛體以同樣大小的角速度同時繞兩個平行軸而反向轉動時,剛體的合成運動為平動[1],所以,只要使托盤相對角速度和牽連角速度大小相等方向相反即ωr=-ωe,就能保證托盤作平動。因為活動鏈輪與托盤在同一小軸上固接,所以,活動鏈輪相對于轉臂裝置的角速度也是-ωe,由前面結構可知,固定鏈輪相對于轉臂裝置的角速度是-ωe。根據齒輪傳動比的計算公式:
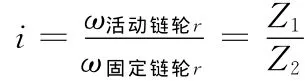
由上面論述可知

設固定鏈輪的齒數為Z1,活動鏈輪的齒數為Z2,所以Z1=Z2,即固定鏈輪和活動鏈輪的齒數相等
3.2 轉軸轉速ω的變化規律
惠斯頓杠桿的力學簡化模型如圖5所示,坐標系X OY取在轉軸的中心O1,轉軸的曲柄長度為R,轉軸轉過角度為θ,轉軸的轉速為ω,與托盤固結的連桿AO2的長度為h,設托盤上與鋼材的接觸點為A點,建立點A的運動方程為

由(1)(2)兩式得

由(3)式可知質點A運動軌跡是以(0,h)為圓心,以R為半徑的圓。對質點A運動分析如圖5,由于質點A運動軌跡是以(0,h)為圓心,以R為半徑的圓,設質點A的絕對轉速為ωA,則質點A的絕對速度為νa=ωA×R,另外,點A的速度從合成運動來分析,其牽連運動是以轉軸中心O1為圓心,轉速為轉軸轉速ω,半徑為L的圓周運動,則質A點的牽連速度為νe=ωe×L,點A的相對運動是以鉸鏈O2為圓心,轉速為ωr,半徑為h的圓周運動,則質A點的相對速度為νr=ωr×h
由點的合成運動可知:

在A點建立另一個坐標系X1AY1,對(4)式在軸Y1A取投影又由圖中幾何關系得

由(5)式可知由電機、減速機驅動的轉軸轉速ω和質點A的絕對轉速ωA相同。即轉軸轉速ω的變化規律由鋼材實際運動變化規律決定的。而實際上希望鋼材在起始點被托盤慢速托起,再加速、勻速、減速、再慢速把鋼材放下,那么要求轉軸轉速ω也應該是這樣變化的。實際工作中轉軸轉速ω是按接近于正弦規律變化的如圖6。

圖5 質點A運動分析圖

圖6 轉軸速度圖
3.3 鏈條拉力
鏈條的拉力為托盤始終做平動提供了一定的動力來源。惠斯頓杠桿的簡化模型如圖5所示,坐標系XOY取在轉軸的中心O1,轉軸的曲柄長度為R,轉軸轉過角度為θ,轉軸的轉速為ω,與托盤固結的連桿AO2的長度為h,設托盤上鋼材的質點為A點,由(3)(4)兩式求二階導數可得質點A的加速度如(6)(7)兩式


圖8 部件受力分析圖
再對質點A受力分析如圖7所示,質點A受到托盤對它的支持力N、摩擦力f和本身的重力G=mg,由牛頓第二定律得

下面以小軸BO2、托盤(包括托盤下面的連桿O2A)、活動鏈輪組成的系統為研究對象,對它進行受力分析如圖8所示,由前面敘述可知,托盤及其固結的連桿O2A在惠斯頓杠桿運動過程中始終做平動,活動鏈輪、連桿O2A、托盤與小軸BO2以鍵固結,所以活動鏈輪和小軸BO2都做平動。平動就說明,圖8組成的系統在運動過程中相對于慣性系沒有轉動,故所有力對小軸BO2取矩得

從而推出

式中f—托盤對鋼材摩擦力的反作力;
N—托盤對鋼材支持力的反作用;
FO2X、FO2Y—鉸鏈對O2點的作力;
FBX、FBY—軸承對B點的作用力;
F—鏈條對鏈輪的拉力;
r—鏈輪的分度圓半徑。
由上式可以看出,當轉軸的轉角規律確定后,鏈條的拉力和鋼材的質量m、轉軸長度R、托盤下面的連桿長度h以及活動鏈輪的分度圓半徑r有關。當運送的鋼材一定時,可以縮短托盤下面的連桿,縮短轉軸長度、加大鏈輪來減小鏈條的拉力。

圖7 質點A受力分析
3.4 轉軸臨界速度
轉軸的臨界速度就是使質點A不脫離托盤時轉軸的最大速度,所以這也是設計時必須要考慮的。從質點A的受力圖7可以看出當轉軸轉到90°時是臨界點,這時要滿足下式成立

4 安裝時出現的問題及解決辦法
4.1 托盤無法調平
原因是先把固定鏈輪定位,裝好鏈條,然后調托盤,這樣特費時費力,很難調平,正確的安裝順序是,在固定鏈輪沒定位之前調平托盤,然后再固定好固定鏈輪的位置。
4.2 鏈輪的輪齒被咬壞或張緊輪被扭曲
原因是活動鏈輪、固定鏈輪、張緊輪三者沒在一條線上,致使鏈條受力不在一個面上,鏈輪或張緊輪的受力也不在徑向上,所以,鏈輪的輪齒被咬壞,或者張緊輪被扭曲。解決的辦法是使固定鏈輪用螺栓與軸承座可調聯結,當調好時再鎖死。另外,三個輪子的軸向定位要牢固,保證其在工作中不竄動。
5 結束語
從運動學和力學的觀點闡述了設計惠斯頓杠桿時注意的幾個關鍵處,惠斯頓杠桿在機械行業已經被廣泛應用,但是在其原理的基礎上做進一步的延伸或改進,設計出更適合實際應用的機構,為現場實際應用提供有價值的參考。
[1]哈爾濱工業大學理論力學教研組編.理論力學.北京:高等教育出版社,1997.
[2]肖永力著.惠斯頓杠桿的研究.重型機械,1995(1):19~21.
猜你喜歡
齊魯師范學院學報(2022年5期)2022-10-13 10:04:18
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
天津音樂學院學報(2021年4期)2022-01-08 02:18:52
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
質量與標準化(2015年8期)2015-07-18 11:11:08
質量與標準化(2015年12期)2015-07-10 15:11:50