小波變換在多源航跡處理中的應(yīng)用
2014-11-10 07:09:50王玉茜田建偉
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2014年3期
關(guān)鍵詞:關(guān)聯(lián)融合
王玉茜,田建偉
(江南機電設(shè)計研究所,貴州 貴陽 550006)
多源航跡處理是雷達組網(wǎng)系統(tǒng)中的重要問題,主要包括各信息源航跡濾波及估計、航跡關(guān)聯(lián)及航跡融合。經(jīng)過多步處理的航跡信息最后用來進行態(tài)勢評估和威脅判斷,為指揮員提供輔助決策。
目前,許多文獻對多信息源航跡處理方法進行了研究探討,但大都是在空間域上對目標(biāo)的航跡參數(shù)進行處理。目標(biāo)航跡數(shù)據(jù)序列實際上是一個非平穩(wěn)隨機過程,在航跡的特征向量分析中,低頻部分反映了航跡的總體態(tài)勢,高頻部分反映了運動細節(jié)和噪聲干擾[1]。而小波的多分辨率特性可以將信號的低頻和高頻部分加以區(qū)分,為在頻域中對目標(biāo)航跡的分析和處理提供了有利條件。因此,本文將小波分析引入目標(biāo)航跡處理問題中,通過小波變換,實現(xiàn)在頻域中對目標(biāo)航跡的處理。
1 問題描述
假設(shè)航跡特征矢量由目標(biāo)的位置 (包括 x、y、z坐標(biāo))、目標(biāo)的速度(對于 x、y、z 方向的速度,即x˙、y˙、z˙)組成,其中x˙、y˙、z˙可以根據(jù) x、y、z 值得出 。
假設(shè)各個傳感器送來的目標(biāo)航跡已進行了坐標(biāo)轉(zhuǎn)換,且當(dāng)不同傳感器傳送數(shù)據(jù)周期不一致時,所有目標(biāo)航跡參數(shù)已按最小傳送周期進行了插值處理,即保證各個傳感器傳送的航跡數(shù)據(jù)是在同一個坐標(biāo)系內(nèi),且有相同的采樣和更新周期。
由于目標(biāo)的航跡序列可看成帶噪聲的一維信號,因此可采用小波對非平穩(wěn)信號的去噪方法對各信息源航跡參數(shù)進行濾波處理,并提取航跡序列的整體特征進行關(guān)聯(lián)配準(zhǔn),對關(guān)聯(lián)上的航跡小波分解系數(shù)進行綜合處理,最后進行小波重構(gòu),即完成航跡融合。
2 小波變換在航跡處理中的應(yīng)用
2.1 一維信號的小波分解原理
對一維離散信號 f(x),首先根據(jù) 尺度 函數(shù) φj0,k(x)和小波函數(shù) ψj,k(x)為 f(x)定義小波序列展開。 離散小波變換對表示如下[2]:


對于 j≥j0,有:

其中,f(x)、φj0,k(x)和 ψj,k(x)是離散變量 x=0,1,2,…,M-1的函數(shù)。通常,令j0=0并選擇M為2的冪(即M=2J),對 x=0,1,2,…,M-1,j=0,1,2,…,J-1 和 k=0,1,2,…,2j-1 求和。Wφ(j0,k)通常稱為近似值或尺度系數(shù),Wψ(j,k)稱為細節(jié)或小波系數(shù),這是因為式(3)中的第一個和式用尺度函數(shù)提供了f(x)在尺度j0的近似,對于第二個和式中每個較高尺度的 j≥j0,更細分辨率的函數(shù)(即一個小波和)添加到近似中,以獲得細節(jié)的增加。
2.2 小波分析在航跡去噪中的應(yīng)用
2.2.1 噪聲信號的小波分析特性
根據(jù)式(3)可知,小波變換實際上是將信號通過低通和高通兩組濾波器,把信號分解成低頻和高頻成分。而從信號處理的角度來看,低頻部分反映的往往是信號的整體態(tài)勢,高頻部分對應(yīng)了運動細節(jié)和噪聲。
在小波分析中,低頻部分對應(yīng)著最大的尺度小波變換低頻系數(shù)。隨著尺度的增加,時間分辨率的降低,對信號的這種發(fā)展趨勢會變得更明顯。因此,可以將信號進行多層小波分解,通過對小波系數(shù)進行閾值處理的方法進行小波去噪。
2.2.2 小波閾值去噪方法
小波閾值去噪方法是一種非線性去噪方法,在最小均方誤差意義下可達近似最優(yōu),且這種方法是實現(xiàn)最簡單、計算量最小的一種方法,便于在工程實際中應(yīng)用。本文采用 Donoho和 Johnstone提出 λ=σ·閾值對航跡序列進行進行去噪處理。目標(biāo)的航跡分坐標(biāo)序列可看作是隨時間變化的非平穩(wěn)隨機信號,可對目標(biāo)的三坐標(biāo)序列分別進行去噪處理。對目標(biāo)航跡序列的去噪方法如下:
(1)分別對目標(biāo)航跡三坐標(biāo)的參數(shù)序列做小波變換,得到對應(yīng)的小波系數(shù) dj,k;
(2)對小波系數(shù)進行閾值處理,得到新的小波系數(shù)為:

其中,α取值為 0~1之間,n為航跡序列采樣點的個數(shù),σ為航跡中隨機噪聲的標(biāo)準(zhǔn)差;
(3)利用估計出的小波系數(shù)d^j,k進行小波重構(gòu),得到新的航跡參數(shù)序列,即為噪聲抑制之后的航跡。
2.3 小波變換在航跡關(guān)聯(lián)中的應(yīng)用
在分布式多傳感器信息融合系統(tǒng)中,判斷2條航跡是否關(guān)聯(lián),主要是比較兩目標(biāo)之間的態(tài)勢和距離[3],而經(jīng)小波變換后的航跡序列的整體走勢可以在低頻部分反映出來,因此可以利用小波分解的低頻系數(shù)來進行航跡關(guān)聯(lián)處理。
設(shè)2條航跡在X軸方向上的參數(shù)序列為{x1(k)}、{x2(k)}(其中,k為采樣點的個數(shù)),在尺度 N上對兩航跡參數(shù)序列小波分解后得到的低頻系數(shù)序列分別為{d1(j)}、{d2(j)}(其中,j為尺度 N 上的低頻系數(shù)長度)。 對2個系數(shù)序列進行信噪比計算:

若Rsn1、Rsn2都大于給定閾值 θ,則表明 2條航跡序列關(guān)聯(lián)。同理,可以判斷Y、Z方向目標(biāo)航跡是否關(guān)聯(lián)。當(dāng)3個方向上都關(guān)聯(lián)時可以認為2條目標(biāo)航跡是關(guān)聯(lián)的。
2.4 小波變換在航跡融合中的應(yīng)用
當(dāng)2條航跡序列經(jīng)過預(yù)處理并關(guān)聯(lián)上后,可以利用在頻域中對分解得到的小波系數(shù)進行融合處理,然后進行小波重構(gòu)得到空間域上的融合航跡。此時,仍然對目標(biāo)航跡3個不同方向上的參數(shù)序列分別進行處理。融合處理的基本步驟如下:
(1)對每一段原始航跡序列分別進行小波變換,求出各自小波分解系數(shù),建立航跡的小波塔型分解,即與小波去噪時的第一步相同;
(2)對步驟(1)中產(chǎn)生的小波分解系數(shù)分別閾值處理,方法同 2.2.2章節(jié)步驟(2),然后進行等加權(quán)處理,形成新的融合小波系數(shù)和新的小波金字塔形結(jié)構(gòu);
(3)對步驟(2)中形成的新的小波系數(shù)進行小波逆變換,所得到的重構(gòu)航跡即為融合航跡序列。
目標(biāo)3個方向上的參數(shù)序列都按照上述3個步驟處理完成后,即為融合后的航跡特征序列。
3 實驗仿真與結(jié)果分析
3.1 基于小波變換的航跡去噪
假設(shè)目標(biāo)做等高變速曲線運動,即飛行軌跡在與大地平行的一個二維平面內(nèi),取該水平面建立坐標(biāo)系,運動軌跡方程為:
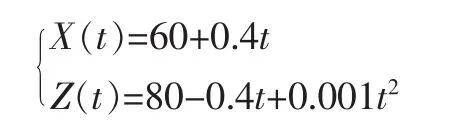
采樣周期為0.1 s,平均觀測誤差方差為 0.1 km,模擬產(chǎn)生連續(xù)100個周期的目標(biāo)狀態(tài)估計數(shù)據(jù),生成目標(biāo)航跡見圖 1(a)。
取 σ=0.5,α=0.1, 利用 db3小波對目標(biāo)分坐標(biāo)航跡進行5層分解,對分解得到的小波系數(shù)按2.2.2章節(jié)的方法進行處理,濾波后的目標(biāo)航跡見圖1(b)。
由圖1(b)可看出,經(jīng)過小波系數(shù)處理后,噪聲得到極大抑制,且目標(biāo)機動部分也得到很好地保留。證明了小波去噪方法的可行性和有效性。

圖1 模擬機動目標(biāo)航跡及濾波后結(jié)果圖
在工程實際中應(yīng)實時地對收到的航跡點進行濾波,因此更實際的做法是當(dāng)接收到M個數(shù)據(jù)點后應(yīng)啟動濾波函數(shù),依次對M個連續(xù)的采樣點進行上述小波去噪處理,即對一條完整的航跡進行窗口大小為M的滑窗濾波處理。經(jīng)多次試驗證明,采樣點越多,濾波得到的航跡曲線越光滑,但濾波器啟動越晚。為保證濾波實時性和去噪的有效性,試驗中取M=10。
進行50次蒙特卡洛仿真,得去噪后目標(biāo)航跡的均方差,見圖2所示。
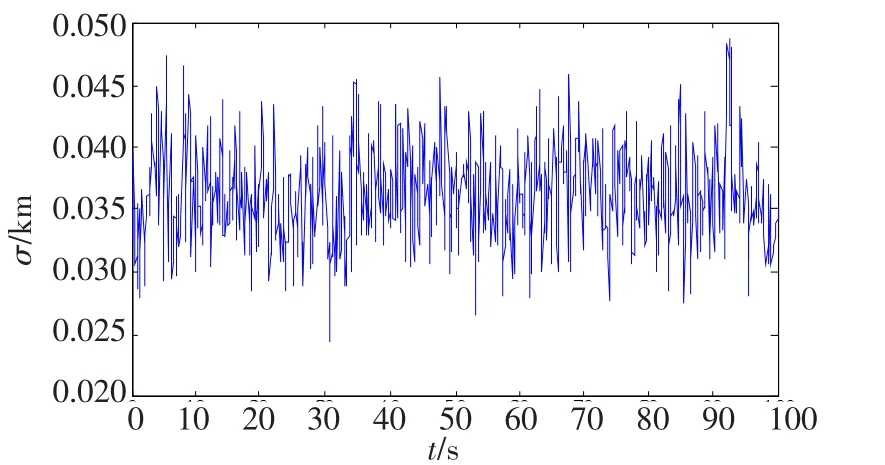
圖2 濾波后航跡誤差均方差
從圖2看出,濾波處理后觀測誤差均方差從0.1 km降至0.05 km以下,證明利用小波變換方法進行的濾波可以有效去除隨機噪聲。
3.2 基于小波變換的航跡關(guān)聯(lián)
假設(shè)4個傳感器送來的目標(biāo)航跡見圖3。其中,航跡1和航跡3由理論航跡分別加入均方差為0.1 km和0.15 km的噪聲得到,航跡2和航跡4由另一條理論航跡加入相同量級的噪聲得到。
當(dāng)收到10個采樣點后啟動關(guān)聯(lián)濾波器,分別對航跡1和航跡2計算其與另外3條航跡的關(guān)聯(lián)度,用式(5)計算的信噪比除以航跡本身的信噪比產(chǎn)生的比值作為航跡的關(guān)聯(lián)度θ。航跡1和航跡2與其他3條航跡的關(guān)聯(lián)度如圖4所示。
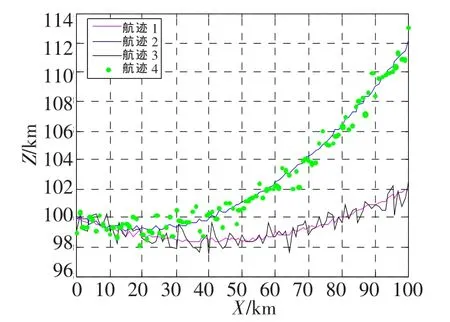
圖3 模擬目標(biāo)航跡
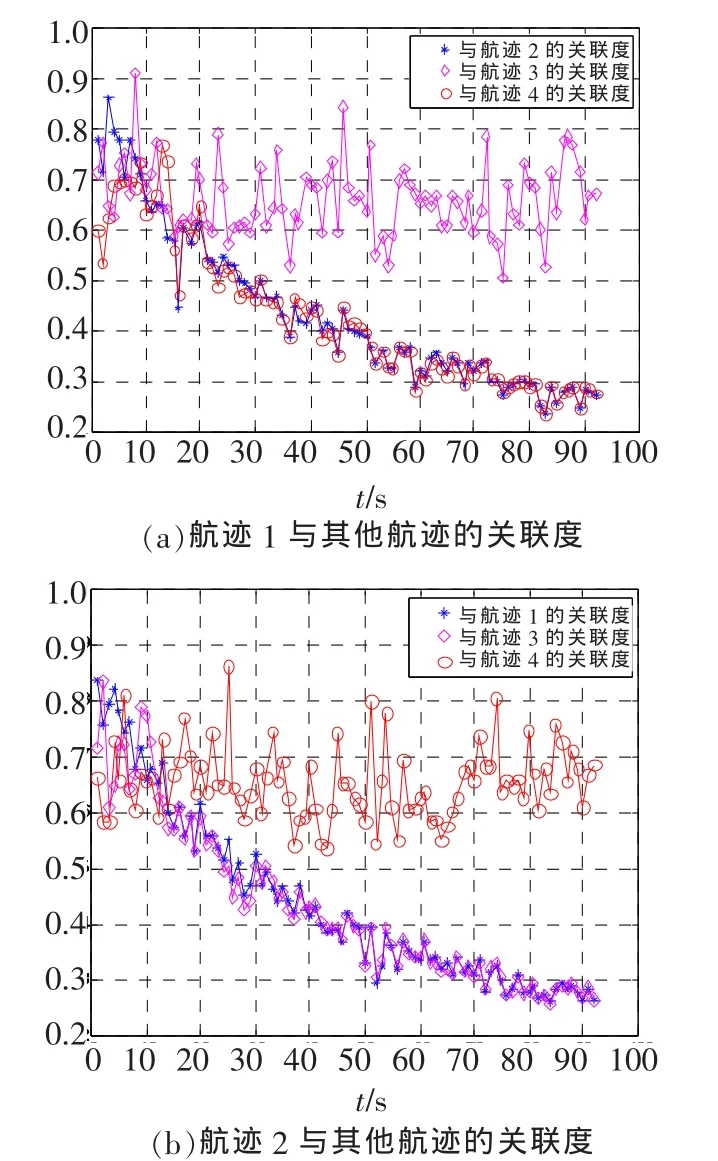
圖4 航跡之間的關(guān)聯(lián)度
取θ=0.5,從圖 4可看出,在前 30拍,每條航跡與其他航跡的關(guān)聯(lián)度都大于0.6,不能對4條航跡進行區(qū)分,認為4條航跡互相關(guān)聯(lián)。從第30拍起,航跡1和航跡2、航跡4的關(guān)聯(lián)度持續(xù)降低,與航跡3的關(guān)聯(lián)度始終保持在0.5之上,航跡 2與航跡1、3的關(guān)聯(lián)度持續(xù)降低,與航跡4的關(guān)聯(lián)度始終保持在0.5之上,說明航跡1和航跡3互相關(guān)聯(lián),航跡2和航跡4也互相關(guān)聯(lián),這與圖3中航跡的變化特征相符。
此關(guān)聯(lián)方法僅用少數(shù)幾個小波低頻系數(shù)就能考慮局部航跡的整體趨勢,計算量小,關(guān)聯(lián)效果較好,證明了小波分析在航跡關(guān)聯(lián)應(yīng)用中的有效性。
3.3 基于小波變換的航跡融合
本節(jié)對3.2章節(jié)中關(guān)聯(lián)上的航跡進行融合處理,仍舊采用db3小波對其進行5層分解,融合方法見2.4章節(jié)。其中取 σ=0.9,α=0.1進行100次蒙特卡洛仿真,得到2條融合航跡的誤差均方差圖,見圖5。

圖5 融合航跡的誤差均方差圖
從圖5可看出,經(jīng)小波變換融合后的航跡觀測誤差均方差降到了0.1 km以下,處于0.05 km附近,比融合前兩條航跡的觀測精度都要高,說明了本文的融合算法能夠使處理后的融合航跡精度得到有效提高。
本文將小波分析理論引入多源目標(biāo)航跡處理領(lǐng)域,并給出了基于小波變換的航跡去噪、航跡關(guān)聯(lián)和航跡融合算法,其本質(zhì)上是在頻域中對目標(biāo)航跡進行處理。仿真實驗證明了算法的可行性和有效性,且經(jīng)多次實驗得出以下結(jié)論:在進行小波去噪時,分解層數(shù)為5層比較合適,此時既能很好地抑制噪聲,又能最大限度地保留目標(biāo)航跡的機動特征;取閾值時,σ的取值要比航跡本身的觀測誤差均方差大,此時才能有效抑噪,考慮到實際中一般傳感器的測量噪聲最大不會超過1 km,因此σ取值為0.8~1時即能滿足要求。
本文僅對小波分析在航跡處理中的應(yīng)用作了初步的探討,同時,通過仿真實驗,證明了基于小波變換的航跡處理方法在實際工程應(yīng)用中有較大的實用價值。對于小波系數(shù)與航跡機動特征的關(guān)系及在航跡關(guān)聯(lián)時怎樣更好地利用小波系數(shù)還需進一步研究。
[1]孫煒,白劍林,呂輝.一種基于小波變換的航跡關(guān)聯(lián)算法[J].電光與控制,2008,15(7):1-3.
[2]GONZALEZ R C,WOODS R E.Digital image processing(Second Edition)[M].Publishing House of Electronics Industry,2007.
[3]侯雪梅,李霞.基于小波變換的序貫航跡關(guān)聯(lián)算法[J].商丘師范學(xué)院學(xué)報,2009,25(9):37-41.
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
