24GHz車載防撞雷達及中頻信號處理電路設計*
2014-11-10 07:09:36姜興,劉濤
網絡安全與數據管理 2014年1期
姜 興,劉 濤
(桂林電子科技大學 信息與通信學院,廣西 桂林 541004)
近年來,隨著我國高速公路網建設的快速發展,惡性的交通事故有著愈演愈烈的趨勢,為減輕事故發生時對人所造成的傷害,已采用行駛安全帶、安全氣囊等保護措施,但這些技術均為被動防護,不能從根本上解決碰撞問題。“主動汽車毫米波防碰撞雷達系統”成為近年來國際上研究與開發的熱點,主動汽車防碰撞是以雷達測距、測速為基礎的實時監測系統。防撞雷達系統實時監測車輛的前方,當有危險目標(如行駛前方停止或慢行的車輛)出現,雷達系統提前向司機發出報警,使司機及時作出反應,同時,雷達向汽車控制系統輸出信號,系統根據情況進行自動剎車或減速。由于毫米波具有帶寬大、分辨率高、天線部件尺寸小及能適應惡劣環境的優點,毫米波雷達系統具有重量輕、體積小和全天候等特點,并已有產品開始投入市場,前景十分好。為提高我國車輛的道路行車安全,滿足汽車電子設備對無線電頻譜資源的需求,推動無線電新技術的應用,根據我國無線電頻率劃分規定及頻譜資源使用情況,工業和信息化部2012年11月19日正式發布了《工業和信息化部關于發布24 GHz頻段短距離車載雷達設備使用頻率的通知》[1]。為了充分利用汽車帶來方便的同時,盡可能地避免車禍的發生,在我國研究和推廣汽車防撞裝置顯得日益重要和迫切。本文基于德國Innosent公司推出的K-波段VCO雷達收發器IVS-179,設計并實現了該雷達及雷達后端中頻信號處理電路。
1 FMCW雷達測距、測速原理
調頻連續波(FMCW)雷達系統通過天線向前方發射一列連續調頻毫米波,并接收目標的反射信號。發射波的頻率隨時間按調制電壓的規律變化。一般使用三角波信號作為調制信號。天線接收到的反射波與發射波的形狀相同,只是在時間上有一個延遲,發射信號與反射信號在某一時刻的頻率差即為混頻輸出的中頻信號頻率,且目標距離與前端輸出的中頻頻率成正比。如果反射信號來自一個相對運動的目標,則反射信號中包括一個由目標的相對運動所引起的多普勒頻移。根據多普勒原理就可以計算出目標距離和目標相對運動速度。
2 系統結構介紹
該雷達系統結構框圖如圖1所示。工作時由K-波段VCO雷達收發器VCO發出經三角調制、頻率隨時間變化的調頻連續波,一部分經90°功分器分為同相/正交兩路進入混頻器,一部分經微帶陣列發射天線向外輻射。目標回波信號被微帶陣列接收天線接收,經射頻前置放大器放大后進入混頻器,與同相/正交兩路發射波混頻,經過低通濾波,產生幅度相同、相位相差90°的兩路中頻差頻信號,得到帶有目標信息的輸出信號I和Q。I為同相信號,Q為正交信號。I、Q兩路信號中均攜帶有探測目標的距離、速度和方向的信息。

圖1 系統結構框圖
在本設計中從K-波段 VCO雷達收發器輸出的I、Q信號具有相同的后續處理電路,即先通過高通濾波器濾除調制的三角波信號,再通過運算放大器放大信號到合適的幅度,輸送到后端信號處理模塊上[2-3]。
3 濾波電路設計
由于遠距離目標的回波信號幅度很小,以小轎車為例,當距離大于 100 m時,經雷達收發器RF-前置放大后的輸出信號幅度約為 10 mV~20 mV,因此,該輸出信號在輸入信號處理模塊進行采樣前必須再次經過放大以提高幅度。但由于輸出信號被三角波調制,必須首先通過濾波器將該信號進行解調,再進行放大。由于多反饋有源濾波器具有低成本、易實現、Q值高及增益高等特點,有源濾波器相比簡單的LC濾波器具有更小的體積和更小的衰減,在本設計中采用多反饋有源高通濾波器。多反饋濾波器[4]原理圖如圖2所示。二階高通濾波器的一般性的傳遞函數可以寫為:

其中,A0為通帶增益。為了簡化電路的計算,并減小電容C1、C2、C3間的容差以盡可能降低濾波器在通頻帶內增益的變化,取C1、C2和C3有相同的電容量(C1=C2=C3=C)。圖2所示電路的傳遞函數為:

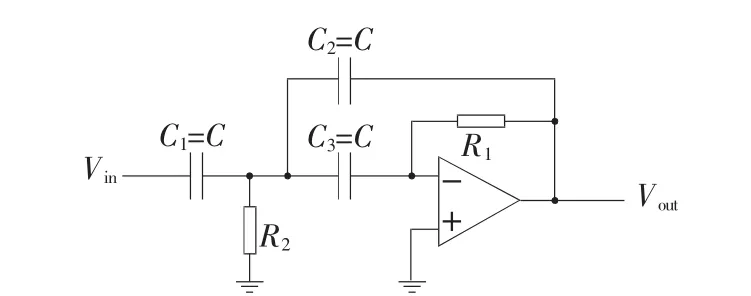
圖2 多反饋高通濾波器原理圖
將式(2)與式(1)進行比較計算,得到單位增益的Butterworth濾波器近似計算公式:

其中,f0為設計 Butterworth濾波器的截止頻率,R、C為根據設計所選擇的電阻阻值和電容容值。為了使得電路供電結構簡單,在本設計中采用單電源供電[5],設計的截止頻率為1 kHz。單位增益的Butterworth濾波器如圖3所示。采用ADS2009軟件進行時域交流仿真結果如圖4所示。

圖3 單位增益的Butterworth濾波器
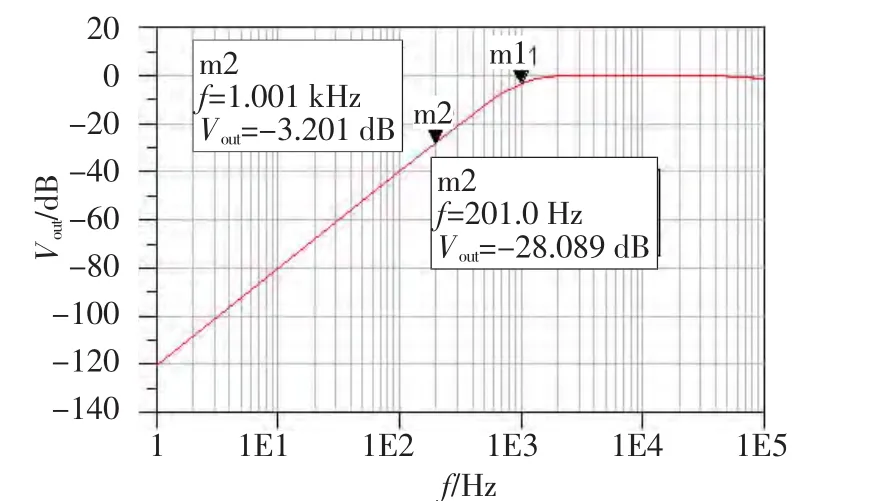
圖4 該濾波器頻率響應
由圖4可以看出,在截止頻率為1 kHz時衰減為3.2 dB,在 100 Hz時衰減為 40 dB,200 Hz時衰減為 28 dB。這表明該濾波器能很好地滿足設計所需要求。
4 AGC放大電路設計
由于輸出信號幅度很小并且隨距離的不同其幅度和頻率也不同,將其送入后端信號處理ADC模塊前需要將其幅度進行適當的放大以滿足后端處理的要求。而用于信號處理的FPGA模塊輸入端口有限幅功能,經測試其最大輸入電壓幅度為2.5 V。將10 mV電壓放大至2.5 V增益約為+48 dB,當距離為15 m左右時,經雷達收發器RF-前置放大后的輸出信號幅度約為500 mV~600 mV。若通過固定增益放大器對信號進行放大以滿足遠距離需要,則距離較近時的信號會被限幅,從而會產生諧波分量,將對計算結果造成干擾,影響系統測量的精度和準確度。由于自動增益控制(AGC)可以隨輸入信號的幅度大小來改變其增益大小,從而可以使得輸出信號幅度穩定在某一電平值,因此,在本設計中引入AGC放大電路。由于AGC對不同頻率的輸入信號的增益不完全相同,因此會造成增益譜不平坦,即有增益起伏。本設計選用的AD603[3]是美國ADI公司推出的一款寬頻帶、低噪聲、低畸變、高增益精度的壓控 VGA芯片,其內部含有負反饋,可以較好地控制增益起伏。所設計單電源供電AGC放大電路原理圖如下圖5所示。由參考文獻[6]可知,AD603的 1管腳(GPOS)和 2管腳(GNEG)間的電壓控制著其增益,單片AD603的增益最大可達+40 dB。為了使增益達到+60 dB,本設計中采用兩片小信號放大器AD603順序級聯模式,有利于控制精度和信噪比的提高,在工作時當第一級的增益用盡后才啟用第二級的增益。設計采用將VOUT與FDBK短路即為寬頻帶模式(90 MHz寬頻帶),此時增益計算公式為 40 Vg+10,可知當 V12(單片 AD603 1、2 管腳間電壓)在-500 mV~500 mV之間時,AD603的增益設置為-10 dB~+30 dB,即兩片級聯AD603的2管腳(GNEG)之間有1 V的壓降。參考文獻[7]采用單片機或者FPGA產生該控制電壓使得系統變得復雜,系統成本增加,在這里通過選取適當的分壓電阻 R4、R5、R6,使得 1、2級間控制腳 GNEG 間的電壓差為1 V,該電路結構簡單,成本低廉。由增益計算公式可得兩片AD603級聯其增益最大可達到+60 dB,滿足設計要求。由Q2和R10組成一個檢波器,用于檢測輸出信號的幅度變化;Q1形成一個電流源,提供基準電流。流進電容C13的電流為兩個三極管Q1、Q2的集電極電流之差,該電流大小隨U2輸出信號的幅度大小的變化而變化,并在C13上產生電壓,形成自動增益控制電壓VAGC,使得加在放大器 U1、U2的 1管腳(GPOS)的自動增益控制電壓VAGC隨輸出信號的幅度變化而變化,從而使得增益控制輸入端電壓變化達到自動調整放大器增益的目的。
5 測試結果
在通過軟件仿真驗證了系統的可行后,制作了電路的相應實物,并將各部分級聯通過調試構成了該雷達防撞及中頻信號處理電路系統。通過實際測試,當在實驗室目標靜止距離該雷達系統15 m時,使用該雷達系統所接收到的經雷達收發器RF-前置放大后的被三角波調制的輸出信號波形如圖6所示,通過后端信號處理電路經過濾波及AGC放大后的信號波形如圖7所示。由圖6及圖7對比可見,該系統很好地濾除了不需要的、對后端信號處理造成干擾的調制三角波信號,抑制了雜散信號,并放大含有目標距離信息的有用中頻信號到峰峰值2.5 V,為后端信號處理模塊提供了穩定的輸入信號,達到了設計所需的要求,且運行狀態穩定。在公路上對行駛目標小汽車進行測試時,測量最遠距離能達到110 m,110 m時的時域波形如圖8所示。雖然從圖中可見雜波干擾比較嚴重,但該信號滿足信號處理的要求,通過信號處理模塊進行相應處理后,在顯示終端上顯示的目標距離和速度如圖9所示。從圖中可得,距離為113.6 m,速度為3.9 m/s,在誤差范圍內結果是準確的。該系統能用于汽車的前向防撞,能有效地提高行車的安全性。
本文設計并實現了一種用于汽車防撞的車載雷達及其中頻信號處理電路。選用K-波段VCO雷達收發器體積小,安裝方便,性能優良;采用0 dB有源多反饋高通濾波器具有體積小,對通帶信號衰減小等優點,有利于準確地提取出帶有目標信息的有用信號;引入自動增益控制電路提高輸出電壓的穩定性,進一步提高信噪比,為下一步信號處理模塊提供高質量的輸入信號,使計算結果更準確;有效地提高了系統整體性能。對所設計的雷達系統實物進行了測試,結果表明,對目標小汽車的探測距離能夠達到110 m以上,取得了良好的效果。

圖6 雷達接收信號波形
圖7 濾波后、AGC放大后的信號波形
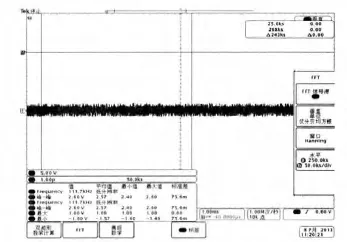
圖8 110 m時濾波后、AGC放大后的信號波形

圖9 顯示終端目標距離和速度
[1]工業和信息化部發布24 GHz頻段短距離車載雷達設備使用頻率規劃[EB/OL].http://www.miit.gov.cn/n11293472/n11293832/n12843926/n13917012/15038134.html,2012-11-29.
[2]岳文豹,楊錄,張艷花.FMCW雷達近程測距系統設計[J].電子技術應用,2012,38(4):73-79.
[3]侯麗娟,李建玲.幾種 AGC電路在雷達中的應用[J].火控雷達技術,2002,31(9):18-22.
[4]MANCINI R.Op amps for everyone[Z].Texas Instruments Incorporated,2001.
[5]CARTER B.A Single-supply op-amp circuit collection[Z].Texas Instruments Incorporated,2000.
[6]AD603英文產品數據手冊 [EB/OL].http://www.analog.com/static/imported-files/data_sheets/AD603.pdf.
[7]陳永剛,劉立國.AD603及其在AGC電路中的應用[J].電子世界,2002(4):39-40.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25