六旋玻璃瓶封口機的設計
2014-12-01 07:55:34陳義厚
長江大學學報(自科版) 2014年29期
關鍵詞:設計
陳義厚
(長江大學機械工程學院,湖北 荊州434023)
罐藏食品在我國有著悠久的歷史。如何保證瓶內食品的質量完好、提高在加工過程中的效率,是廠商必須考慮的一大因素。本研究對六旋玻璃封口機的結構和工作原理,并對關鍵參數進行了優化設計。
1 主要結構及工作原理
六旋玻璃瓶封口機是對螺旋玻璃瓶進行封口的一種機械,它能很方便地將排走真空的罐頭食品進行封蓋,其封口力矩可調,封口性能穩定,操作方便。該機由V帶傳動、摩擦離合器、抱瓶機構、升降機構和旋蓋裝置等組成(圖1)。
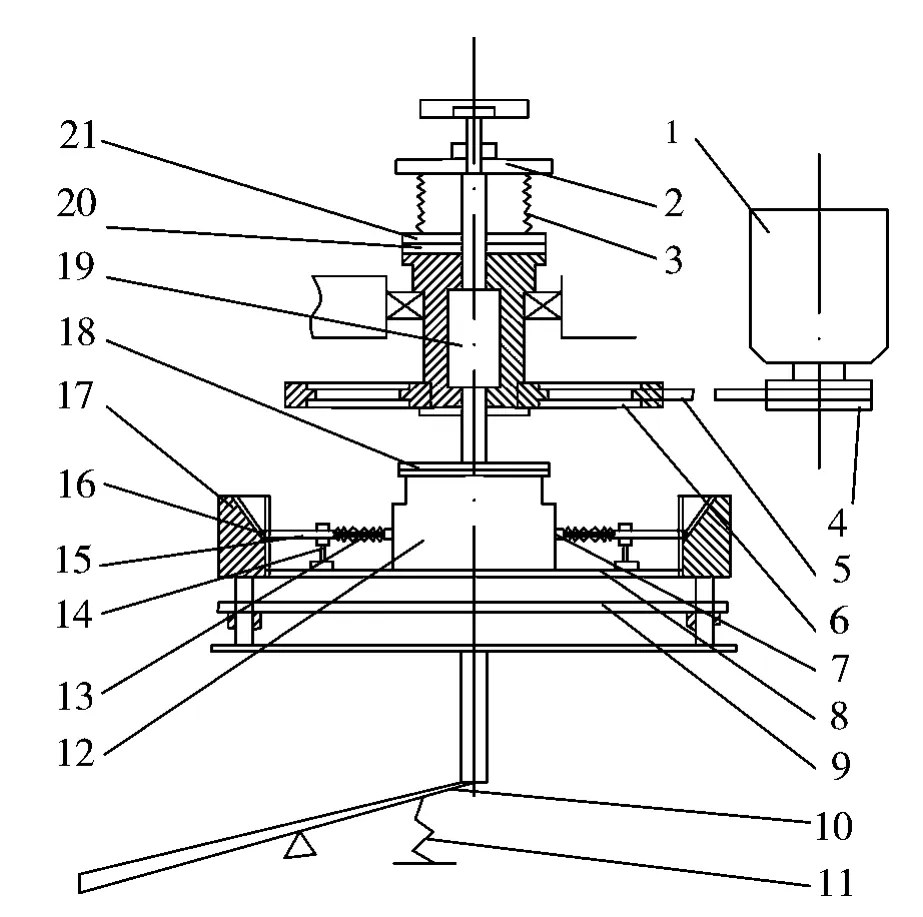
圖1 六旋玻璃瓶封口機示意圖
六旋玻璃瓶封口機的工作原理為:電機1通過V帶5帶動摩擦離合器20、21旋轉,摩擦離合器帶動旋蓋頭18轉動。經熱排氣后配蓋的罐頭12放到瓶托8上,踏下腳踏板10使滑槽塊17上升,滑槽塊上的斜槽推動抱瓶桿15向瓶中心移動,使抱瓶座7抱緊瓶子。然后瓶托隨抱瓶機構一起上升,頂在旋蓋頭上,由旋蓋頭靠摩擦力帶動蓋轉動,由于瓶被抱緊不動,從而把瓶蓋擰緊在瓶上。當達到所需的擰緊力時,離合器從動片21克服離合器彈簧3的壓力,沿主軸19上移而打滑。調整螺母2可以改變離合器彈簧3的壓力,即擰蓋力距的大小。松開腳踏板,在回位彈簧和自重作用下,瓶、瓶托及抱瓶機構下降,抱瓶桿回復到原位,封口結束。
2 設計與計算
2.1 封口機離合器的設計
玻璃瓶封口機在封口過程中,當瓶蓋封緊時電機帶動主軸繼續旋轉。此時,需有一機構使旋蓋頭的旋蓋力與玻璃瓶蓋分開,以免損壞玻璃瓶。離合器就能實現這一功能,使得機械能順利封口。
摩擦式離合器離合平穩、柔順無沖擊,可在高的轉速下進行離合,過載時打滑有安全保護作用,并有較高的適應性,故選用摩擦式離合器。
離合器是一種可以通過各種操縱方式,實現主從動部分在同軸線上傳遞運動和動力時具有接合或分離功能的裝置。
離合器的計算轉矩由此式計算:Tc=
式中,T—離合器的理論力矩,取T=7000N·mm;K—工作情況系數,由于玻璃瓶封口機是農業機械,根據離合器工作情況系數K的概略值可遠取K=1.5;Km—接合頻率系數,根據接合頻率系數Km表值,取離合器每小時接合次數為240次,取Km=0.72;Kv—滑動速度系數,Kv=1.0。
在對摩擦片直徑計算時,要考慮到軸的直徑及與其的配合。根據強度條件可確定摩擦片外徑:
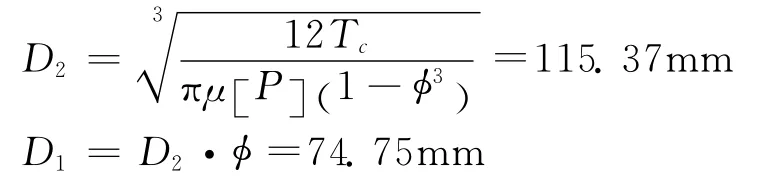
式中:摩擦系數μ取0.25;許用應力 [P]取0.2N/mm2;系數φ=0.65;D1為摩擦片的內徑,mm;D2為摩擦片的外徑,mm。圓整取D1=70mm,D2=115mm。
摩擦片數目:

式中,Kz—摩擦面對數修正系數,取Kz=1。
2.1.1 摩擦離合器的摩擦轉矩
由Tμ=μPARv[1]可計算得出:
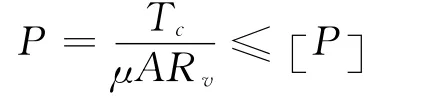
2.1.2 摩擦面的壓緊力Q
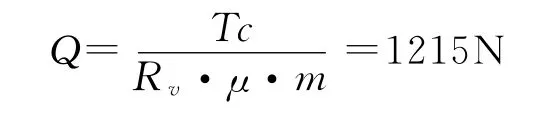
式中,Tc—離合器的計算轉矩,N·mm;m—摩擦面對數,取m=1;μ—摩擦系數;Rv——當量摩擦半徑,mm。
2.1.3 摩擦式離合器的滑移邊及耐磨性
離合器在接合時,主動片與從動片間有個滑移過程,必然引起磨損和發熱,所以需對離合器進行磨損和發熱校核。在滑移功計算中,假設接合開始時,主動軸角速度為額定角速度,ω1=πn/30,從動軸角速度ω2=0,產生的摩擦力矩Tf=KT,主動軸力矩和阻力矩都為額定力矩,則滑移功W 為[2]:
式中,Je—輸入軸的轉動慣量,由結構求得Je=0.305kg·m2;Jn—輸出軸的轉動慣量,由結構求得Jn=7.5×10-3kg·m2;ω1—額定角速度,
所以W =30.1J
單位面積上的滑移功A:
式中,F =π(R22-R21)=6.09×10-3m2。
計算得A=4.95×103J/m2<14.7×104J/m2,滿足耐磨性要求。
2.2 抱瓶機構的設計
六旋旋玻璃瓶封口機在進行玻璃瓶封口時,當旋蓋力達到瓶蓋封緊所需要的力度后,摩擦離合器克服旋蓋力矩,保護玻璃瓶。此時,抱瓶桿的夾緊力應該大于旋蓋力,以至于玻璃瓶被抱瓶桿抱緊而不打滑。而此機械是一種封口為Φ40mm~Φ200mm的六旋玻璃瓶封口機。在設計過程中,對抱瓶機構的結構尺寸都有嚴格的要求[3-4]。
2.2.1 滑槽的設計
封口時最大瓶為Φ200mm,最小瓶為Φ40mm,而抱瓶桿長度不變,所以滑塊最大行程AB=80mm,滑槽斜角∠ABC=60°,根據勾股定理,得到AC=139mm,AB=80mm,BC=160mm,為了防止滾子脫出滑槽,取AC=140mm。其結構圖如圖2所示。
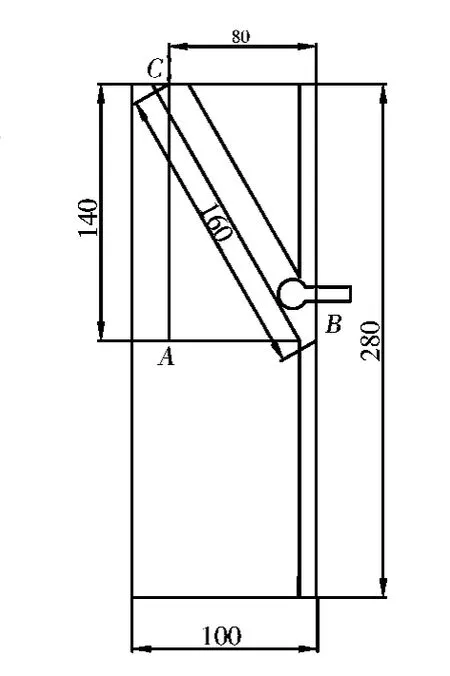
圖2 滑槽的結構
2.2.2 抱瓶桿的設計
瓶托與支架是連接不動的,抱瓶桿滾子一端在滑槽中滑動時,抱瓶桿在滑槽內升縮,其長度BD應大于80mm,否則當抱瓶桿滑動到滑槽塊的最頂端時,滾子就有可能滑出滑槽塊,為了機械能順利工作,取BD=100mm。而在抱瓶爪的一端,彈簧尺寸松開時應小于80mm,取抱瓶爪設計成弧形,抱瓶彈簧松開時,其長度應小于AB長度,以免彈簧力過大,致使支架與滑槽接觸產生摩擦力,影響封口,因此,BC應小于80mm,取BC=70mm。
2.2.3 腳踏力的計算
在設計中應考慮腳踏力的大小,一般腳伸出時的力,男工應小于488N,女工應小于350N,因此應對該機腳踏力進校核。否則,當工人在工作中,就會工作用力過大,耗費體力太多而工作勞累。
在夾緊過程中,取770g六旋玻璃瓶的最大開啟力矩為7N·m,為保證在封口時瓶不轉,也就是抱緊機構與瓶的摩擦力矩應大于7N·m,則抱瓶座的正壓力Q1為:

式中,f—摩擦系數,f=0.5;d—瓶直徑,d=0.095m;T—離合器的理論力矩,取T=7000N·mm。
計算得:Q1=147.37N
抱瓶桿是由傾角60°的斜槽推動,那么使滑槽塊上升的推力F1=2Q1tg60°=510.5N。
考慮上升部分的重力,回位彈簧的接力及穩中有降部分的摩擦力,取F2=100N。設計腳踏板杠桿比為2∶1,則腳踏力F為:

當瓶、瓶托上升時,瓶已夾緊。因此,在封口時,腳踏力用來提供蓋與封蓋頭一起旋轉所需的正壓力F3,以及用來克服整個上升部分的重力F4和回位彈簧的拉力F5,設計F4+F5=150N,蓋與封蓋頭接觸,R2=41mm,R1=25mm,摩擦半徑Rv=33.165mm,摩擦系數f=0.16,則F3=Tf/Rv=346.174N,那么腳踏力F=(F3+F4+F5)/2=248.14N<350N。
[1]李修渠.半自動玻璃瓶封罐機的改進 [J].食品與機械,1995,(5):29-33.
[2]孫風蘭.食品包裝機械學 [M].哈爾濱:黑龍江科學技術出版社,1990:179-182.
[3]孫世昌.雙重偏心式卷封機構的滾輪運動軌跡和軌跡方程 [J].食品機械,2002,(3):22-23.
[4]林瑞春.封罐機滾輪機構的改進 [J].食品機械,2000,(5):29-33.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
