基于可變容積力加載裝置的研制
2014-12-05 02:19:52吳金波
艦船科學技術 2014年11期
田 立,吳金波
(華中科技大學 船海學院,湖北 武漢430074)
0 引 言
船舶軸系主要由傳動軸、傳動部件、支撐部件以及其他一些附件組成,是船舶動力裝置的重要組成部分。船舶螺旋槳的正常運行很大程度上依賴于船舶軸系工作的可靠性。研究船舶軸系的受力有助于保證軸系具有足夠的強度與剛度,以便于能夠正常工作[1]。
本文研究的加載裝置用于模擬某船舶軸系在實際工作過程中受到的軸向外負載,可以在實驗室環境下分析該軸系的動力學特性及其支撐軸承的受力情況。傳統的力加載裝置有彈簧加載、電動加載、電液伺服閥加載等。王輝等[2]分析了前2種加載方式的缺點并提出了改善電液伺服加載系統控制精度的方法;郭津津等[3]進行了電液比例加載系統的研究。這2 種加載方式由于受限于閥本身控制的靈敏性,加載的控制精度無法進一步提高。
李維嘉等[4]提出了一種由壓力筒,用來強制改變液體體積的機械裝置,計算機控制系統以及壓力傳感器等組成的高精度壓力控制裝置。該裝置利用機械動力使封閉容積內液體體積發生強制改變,從而控制封閉容積內壓力。本文將改變液體體積實現壓力控制的方法應用于力的加載裝置上。
1 工作原理
力加載裝置液壓部分工作原理如圖1所示。
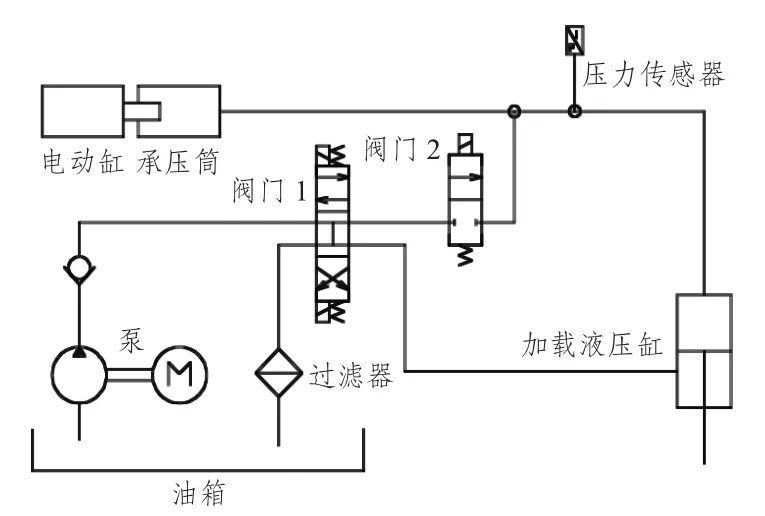
圖1 液壓原理圖Fig.1 Hydraulic principle diagram
該裝置液壓部分主要由電動缸、承壓筒、加載液壓缸、泵及其他液壓輔件組成。其中承壓筒,液壓缸內無桿腔以及連接的管道構成一個封閉的容積;閥門1 的作用是控制泵將油箱中的油液泵入到封閉容積或者是液壓缸的有桿腔;閥門2 的作用是在失電狀態下對封閉容積起到密封的作用。壓力傳感器的作用是作為加載裝置的檢測反饋元件。
在每個采樣控制周期內,系統控制器根據指令加載力和實際加載力(由壓力傳感器反饋計算得到)之間的偏差,按照一定的控制規律計算出本采樣控制周期內所需要輸出的控制量,傳遞給電動缸驅動器,控制電動缸伸縮運動,改變封閉容積內壓力,也就改變了加載力,從而達到按一定的控制精度和響應速度改變加載力的目的。
2 控制器設計
由于加載力受力面積固定,因此可以用封閉容積內的壓力控制來近似代替對加載力的控制。本系統采用積分分離PID 控制算法。在偏差較大時,采用PD 控制器控制,可避免產生過大的超調,同時可以提高系統響應速率;當偏差減小到一定范圍時采用PID 控制器控制,保證系統的控制精度[5]。
設定系統輸出控制量為u(t),PID 輸出控制量為u(t)p,則其控制算法可以描述為

式中:ε 為分段式PID 控制的分段閾值;e(t)為系統偏差(指令信號與實際信號之間的差值),即e(t)=Pa-Pe,Pa為系統指令壓力,Pe為系統實際壓力。則
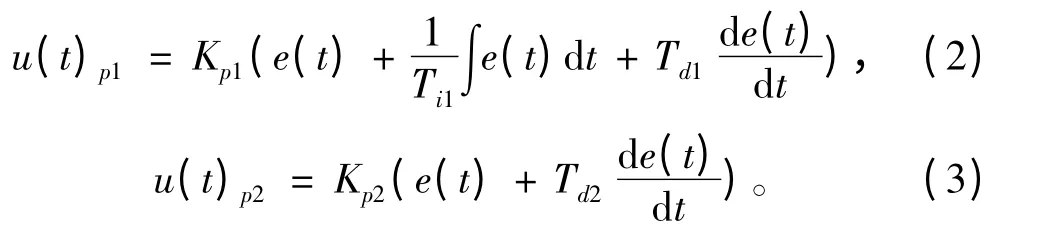
式中:Kp為控制算法比例系數;Ti為控制算法積分系數;Td為控制算法微分系數。對于高精度系統,為了提高系統的跟蹤性能,在系統采用積分分離PID控制算法的同時,引入前饋補償控制。則系統輸出控制量為:

式中:Kf為前饋補償系數;u(t)f為前饋控制輸出。圖2所示為力加載控制裝置。
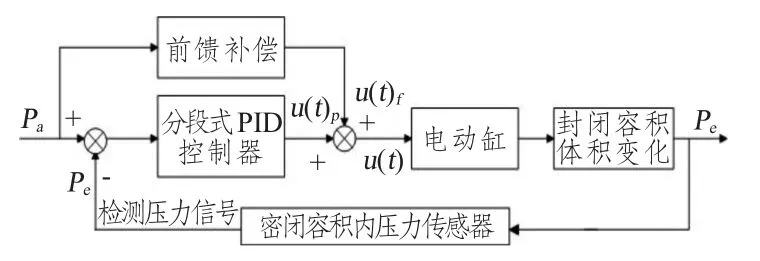
圖2 系統控制方框圖Fig.2 System control block diagram
3 實驗研究
采用上述控制策略進行實驗研究,其實驗條件為:控制器為BACKHOFF PAC 控制器(可編程自動化控制器),用ST 語言編寫邏輯控制程序;系統采樣控制周期為5 ms;動態加載力基礎載荷為75 T,交變載荷幅值為13 T,交變頻率f0最大為4 Hz,即系統指令加載力Fi=75+13sin2πf0t。系統采用的壓力傳感器分辨率為0.01 Ma,得到以下一系列不同交變頻率時的實驗結果圖。
圖3 中的系統指令加載力Fi=75 T,從實驗結果中可知,穩態加載時系統最大偏差為0.6 T,從而得到系統的穩態加載精度為0.8%。
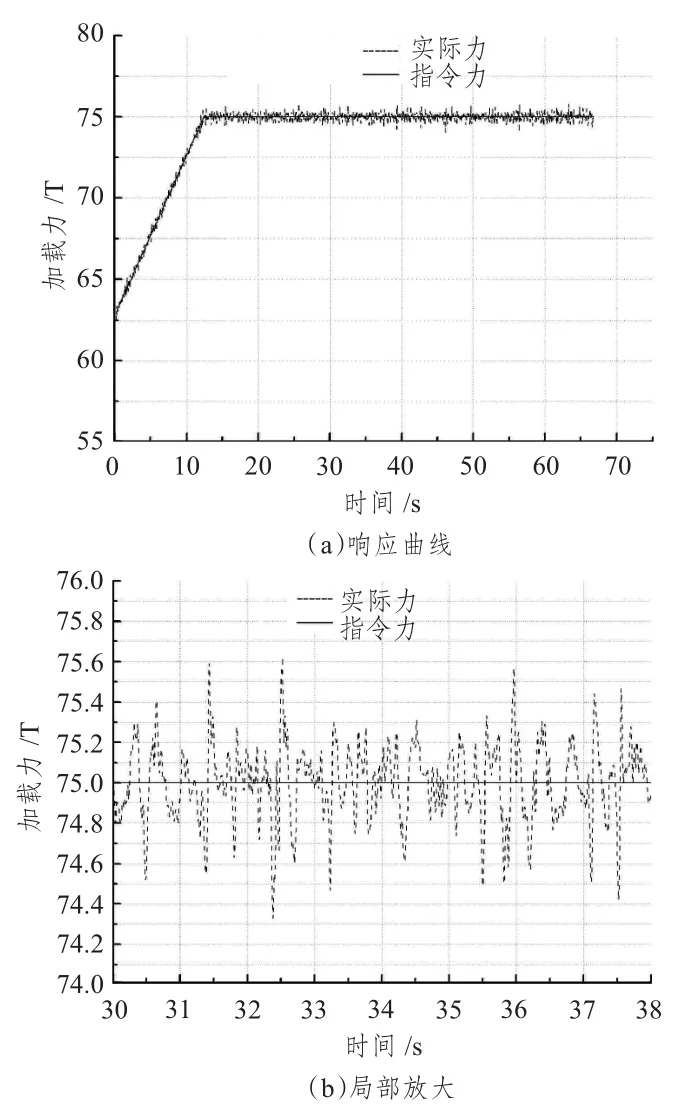
圖3 穩態加載結果圖Fig.3 The steady-state loading result figure
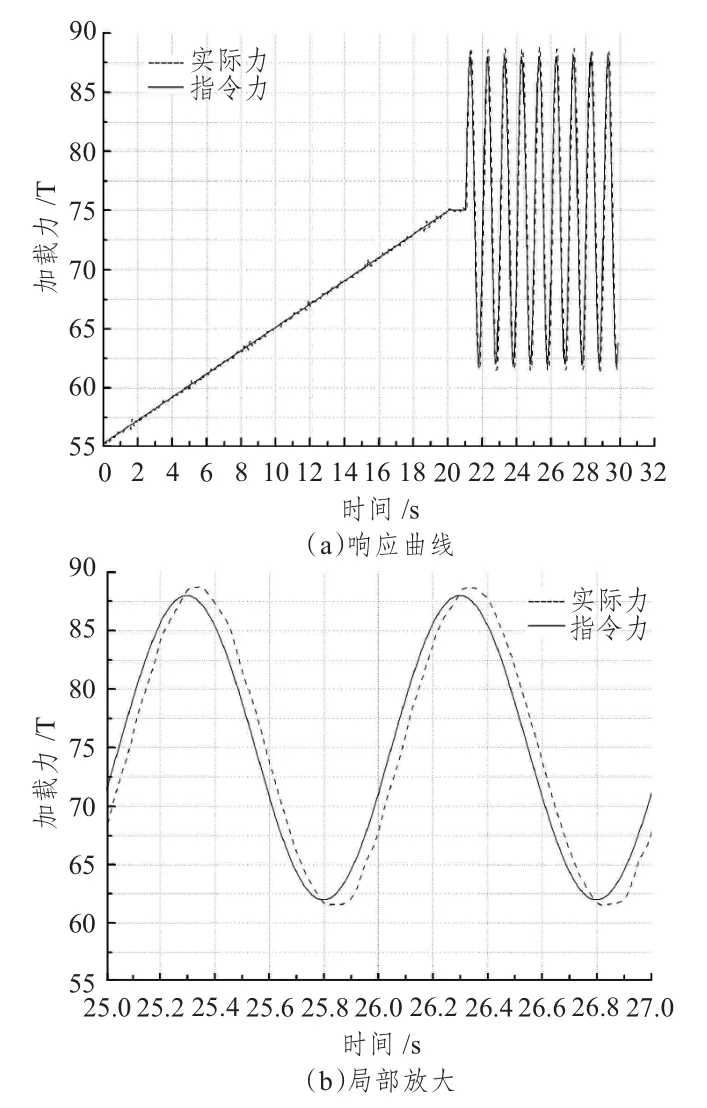
圖4 動態加載1 Hz 結果圖Fig.4 Dynamic loading 1 Hz result figure
圖4 中的指令動態加載力Fi=75+13sin2πtT,從實驗結果可知,動態加載力交變頻率為1 Hz 時,系統幅值誤差為1.8%,相位滯后角度為9°。
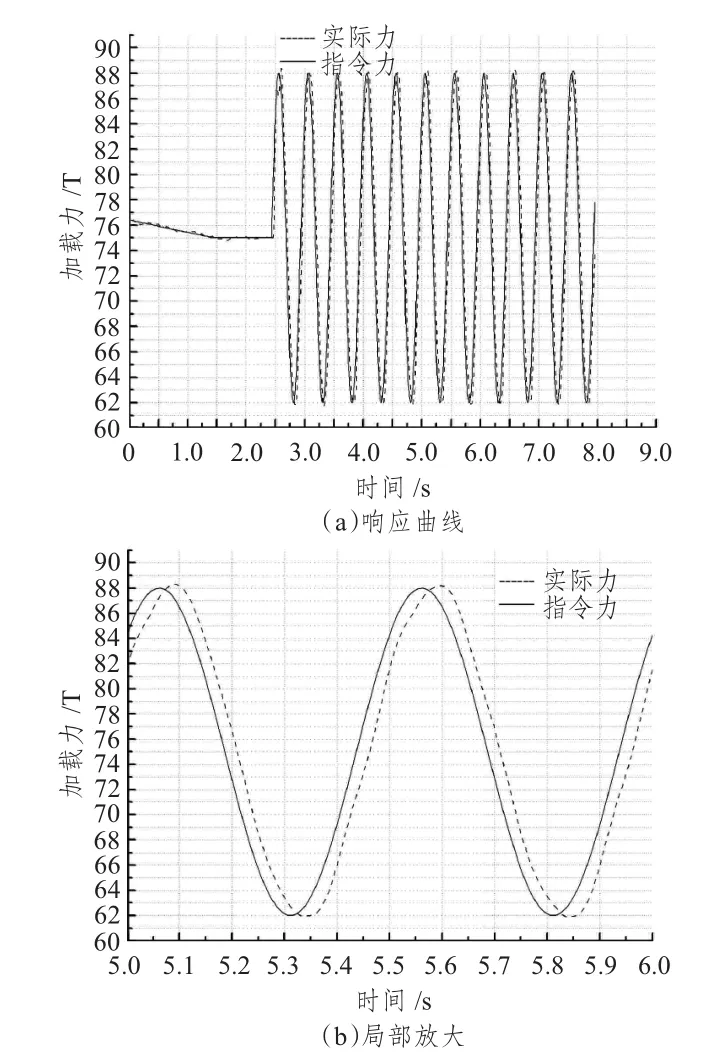
圖5 動態加載2 Hz 結果圖Fig.5 Dynamic loading 2 Hz result figure
圖5 中的指令動態加載力Fi=75+13sin4πtT,從實驗結果可知,動態加載力交變頻率為2 Hz 時,系統幅值誤差為0.26%,相位滯后角度為18°。
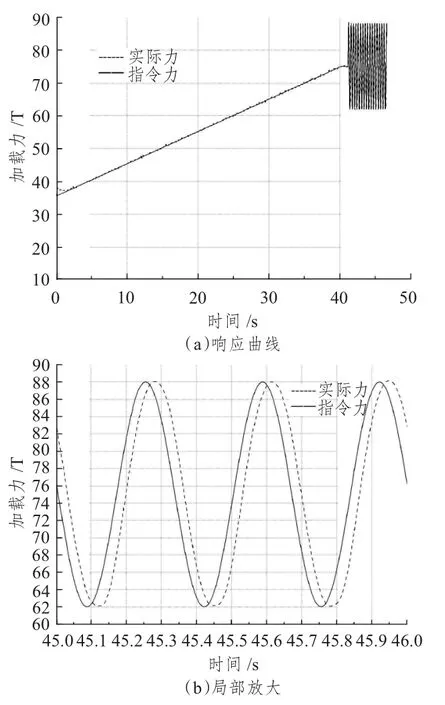
圖6 動態加載3 Hz 結果圖Fig.6 Dynamic loading 3 Hz result figure
圖6 中的指令動態加載力Fi=75+13sin6πtT,從實驗結果可知,動態加載力交變頻率為3 Hz 時,系統幅值誤差為0.19%,相位滯后角度為27°。
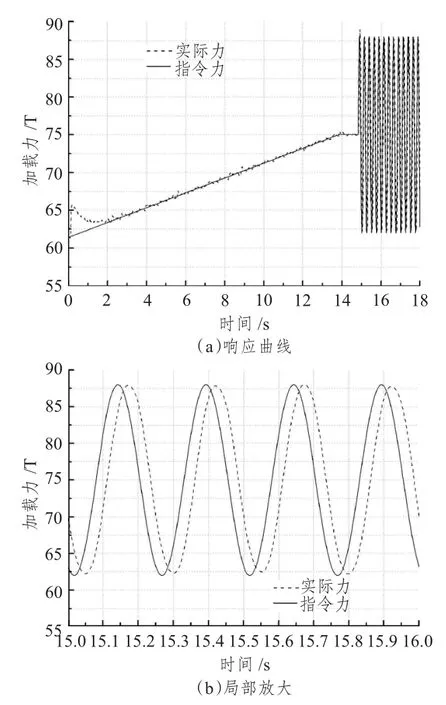
圖7 動態加載4 Hz 結果圖Fig.7 Dynamic loading 4 Hz result figure
圖7 中的指令動態加載力Fi=75+13sin8πtT,從實驗結果可知,動態加載力交變頻率為4 Hz 時,系統幅值誤差為0.15%,相位滯后角度為36°。
以上實驗結果表明,本文研制的加載裝置對于動態指令力存在著較大的相位滯后。這是由傳感器、數據處理、驅動器和執行機構等環節的滯后所帶來的;封閉容積中的油液混有一定量的氣體,其彈性模量會隨著壓力的變化而變化[6],這也會帶來一定的相位滯后。系統實驗結果中幅值誤差通過調整控制參數已經被控制在允許范圍內,還需要消除系統相位滯后。
4 滯后補償
將以上實驗結果中相位滯后角度及滯后時間按動態加載時交變頻率的不同記錄于表1。
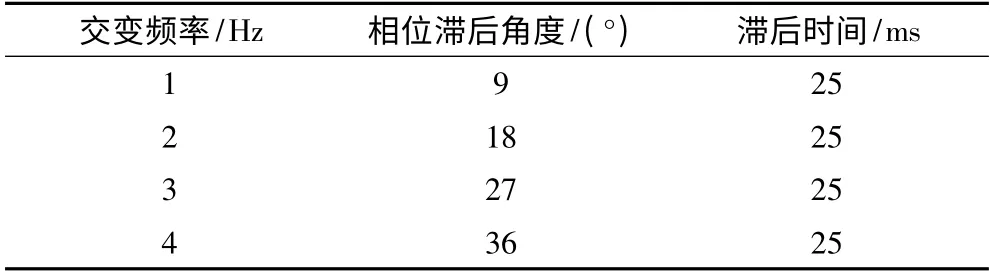
表1 相位滯后隨頻率的變化Tab.1 Phase lag changes with frequency
因為系統采樣控制周期為5 ms,所以滯后時間選取為5 ms 的整數倍。通過表1 可以發現,對于不同的動態加載交變頻率,雖然相位滯后角度各有不同,但相位滯后的時間大致相同。從工程實現角度,可將本加載裝置的相位滯后簡化為一個純滯后環節。在每一個采樣控制周期,對任意控制時刻,采用超前25 ms 的指令加載力來代替當前時刻的指令加載力,然后再按照控制算法確定系統輸出控制量,從而實現一種簡單的超前補償控制方法。
按上述滯后補償方法得到動態加載時不同交變頻率系統實驗結果如圖8所示。
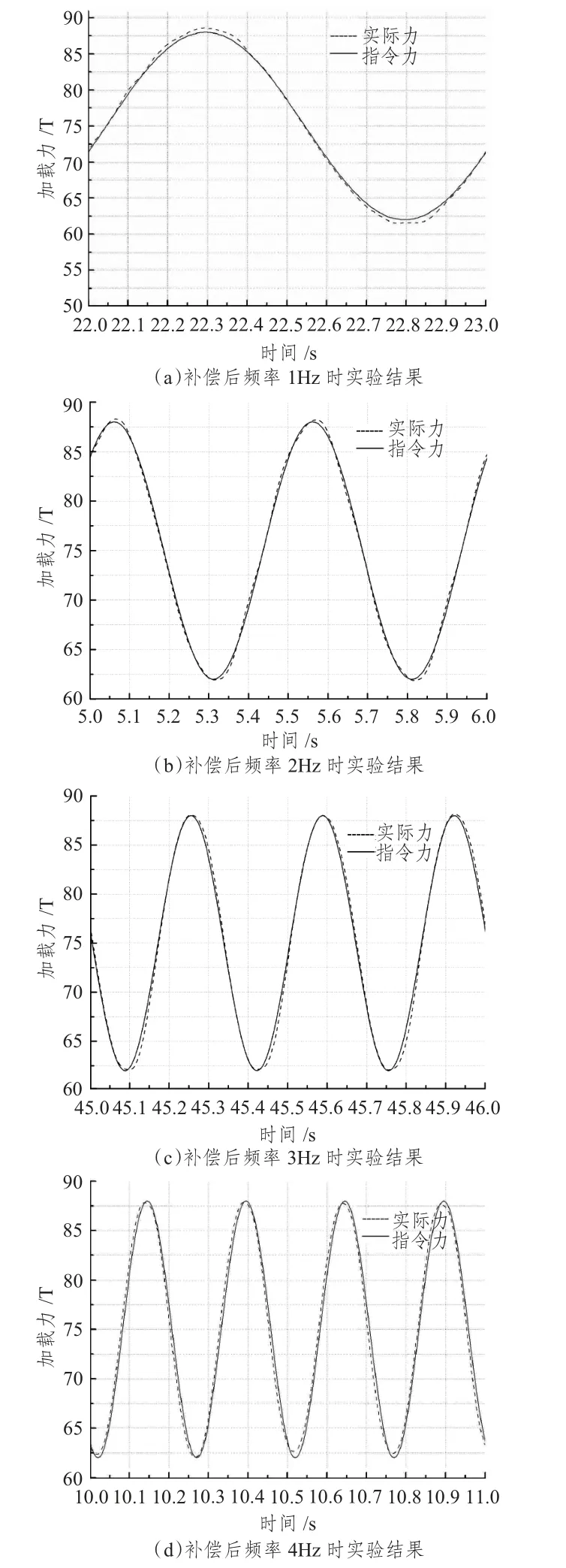
圖8 相位補償后系統實驗結果圖Fig.8 The result figure after phase compensation
由圖8 實驗結果可看出,系統經過預測補償消除相位滯后,系統動態加載幅值誤差在2%以內,相位滯后在1°以內,達到了較好的控制效果,且本文所研究的力加載裝置加載連續穩定,無突然跳變現象。
5 結 語
本文所研究的力加載裝置根據密閉容積內電動缸伸縮改變容積內液體壓力研制而成,結構優良,加載穩定,具有良好的動態和穩態精度。目前,本加載裝置已應用于某船舶軸系受力檢測分析裝置,效果良好。
[1]艾維,方開翔.船舶軸系力學建模與仿真研究[J].造船技術,2007(4):42-43.
AI Wei,FANG Kai-xiang.Ship shafting mechanics modeling and simulation[J].Shipbuilding Technology,2007(4):42-43.
[2]王輝,許守林,馮英進,等.飛行模擬器操縱負荷力加載控制系統的實驗研究[J].中國機械工程,2008,7(2):1720-1723.
WANG Hui,XU Shou-lin,FENG Ying-jin,et al.Testing research for control loading system of flight simulator[J].China Mechanical Engineering,2008,7(2):1720-1723.
[3]齊心,郭津津.電液比例加載系統的研究和優化[D].天津:天津理工大學,2013:1-5.
QI Xin,GUO Jin-jin.The study and optimization of the electro-hydraulicproportional force control system[D].Tianjin:Tianjin Polytechnic University,2013:1-5.
[4]羅聲,李維嘉,張金喜.基于改變容積的高精度壓力控制系統的研究[J].液壓與氣動,2007(5):18-19.
LUO Sheng,LI Wei-jia,Zhang Jin-xi.A high precision pressure control system based on the controllable varied volume of contained liquid[J].Hydraulic and Pneumatic,2007(5):18-19.
[5]劉金琨.先進PID 控制及其MATLAB 仿真[M].北京:電子工業出版社,2003.
LIU Jin-kun.Advanced PID control and MATLAB simulation[M].Beijing:Publishing House of Electronics Industry,2003.
[6]YU Jing-hong,CHEN Zhao-neng,LU Yuan-zhang.The variation of oil effective bulk models with pressure in hydraulic systems[J].J DYN SYST-T ASME,1994,3(116):146-150.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52