船舶系泊系統(tǒng)動力分析
2014-12-07 05:22:12李繼鎖朱克強(qiáng)孫培軍
艦船科學(xué)技術(shù) 2014年10期
李繼鎖,朱克強(qiáng),孫培軍,王 晨
(寧波大學(xué) 海運(yùn)學(xué)院,浙江 寧波315211)
0 引 言
海洋作為戰(zhàn)略性的資源基地,其中蘊(yùn)含著極其豐富的油氣資源[1]。然而這些資源的探測、開采和運(yùn)輸都要用到海洋平臺以及各類船舶。要使這些海洋結(jié)構(gòu)物安全地生產(chǎn),必須要有可靠的系泊系統(tǒng)來為它們定位,這就促使系泊動力分析成為一項(xiàng)重要的 技 術(shù) 領(lǐng) 域。Childers,Niedzwecki,Casarella 及Nath and Felix[2-7]等對系泊纜索的動力分析做出了重要貢獻(xiàn)。
為了逼真地模擬系泊系統(tǒng)的動力特征,必須滿足以下要求:
1)建立一個數(shù)學(xué)模型模擬系統(tǒng);
2)獲得所有環(huán)境載荷的計(jì)算方法[8];
3)確定并將系泊系統(tǒng)的剛度特點(diǎn)應(yīng)用到船舶的動力分析之中。
一旦得到纜索恢復(fù)力與時間的關(guān)系,就可以推導(dǎo)出船舶的運(yùn)動方程。
通過對船舶運(yùn)動方程的求解,可以得到纜索的張力特性,這對系泊系統(tǒng)的動力分析非常有意義。
本文討論船舶在系泊系統(tǒng)作用下的動力特征,采用拉格朗日方程對纜索的動態(tài)特性進(jìn)行計(jì)算,得出纜索在動態(tài)情況時張力隨時間的變化關(guān)系。通過船舶的三自由度運(yùn)動方程比較纜索在準(zhǔn)靜態(tài)和動態(tài)時的張力特點(diǎn),得出船舶的動態(tài)特性對纜索張力的影響。
1 纜索數(shù)學(xué)模型
為了得到一種預(yù)測纜索動態(tài)特性的方法,Khan和Ansari 把纜索抽象成由多個部分組成的動態(tài)系統(tǒng),然后用運(yùn)動方程來表示張力與船舶位移之間的關(guān)系。纜索的數(shù)學(xué)模型可由多階自由變量構(gòu)成,并且可以把2個節(jié)點(diǎn)之間的部分看成是無質(zhì)量的剛性連接。
以錨的坐標(biāo)為(x0,y0)建立坐標(biāo)系,根據(jù)拉格朗日方程:

式中:T,V 分別為系統(tǒng)的動能和勢能;p1,p2,…,pn為一組用于定義系統(tǒng)運(yùn)動的坐標(biāo);N為坐標(biāo)個數(shù);λ?為拉格朗日乘數(shù);Qk為作用在pk上的廣義不守恒力;a?k定義為,(? = 1,2...c;k = 1,2,…,N);f?為關(guān)于常數(shù)c的方程。
對于n 段纜索模型,其動能和勢能為:

纜索所受的約束為:
錨的運(yùn)動方程為:

n 段纜索模型也可以用如下n個方程組成的矩陣方程[9]表示:

虛功率和纜索廣義力[10]的關(guān)系為:

纜索p 段受到的切向和法向力為:

那么可由式(7)得到切向力和法向力。而纜索的切向力相對于其他力非常小,可以忽略不計(jì),則p 節(jié)點(diǎn)的廣義力為:

纜索的尾端力為:


由此可得相鄰部分的張力關(guān)系為:
根據(jù)式(10)~式(12)從第n 段開始計(jì)算就可以計(jì)算出纜索張力和時間的關(guān)系。
2 船舶動力分析
船舶動力分析最準(zhǔn)確的方法是使用船舶的六自由度運(yùn)動方程,但這種方法過程復(fù)雜,計(jì)算量大,因此一般情況只使用三自由度運(yùn)動方程進(jìn)行計(jì)算。船舶的運(yùn)動方程如下:
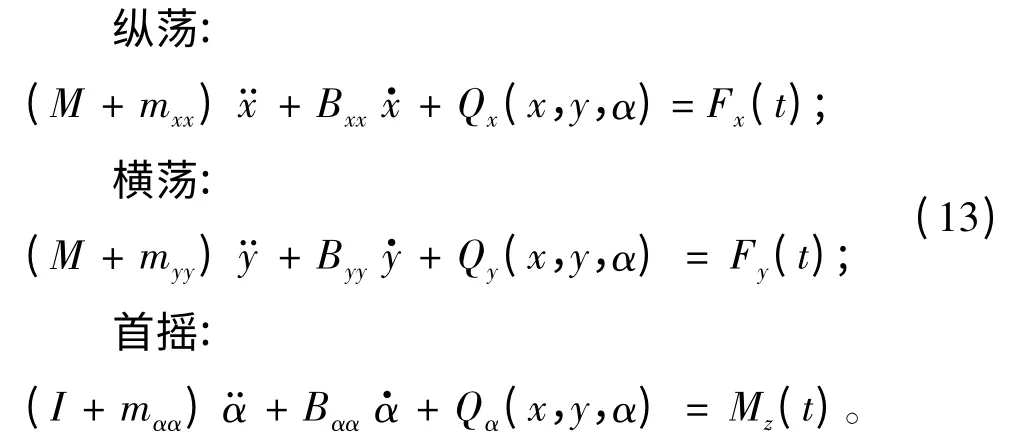
由于系泊系統(tǒng)的動力特性與任意時刻的船位有關(guān),那么Qx,Qy,Qα可表示為:
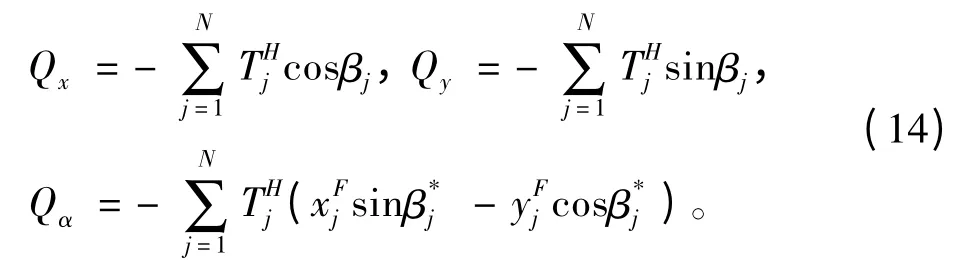
式中:βj為第j 段纜索與x 軸的夾角;為纜索的水平張力;為船舶質(zhì)量中心在坐標(biāo)原點(diǎn)時船舶導(dǎo)纜孔的初始坐標(biāo)。
3 數(shù)值求解
以上得到的一系列關(guān)于纜索的方程均可以表示成如下形式:

式中:M為質(zhì)量矩陣;{F}為力的列矩陣。
以纜索的靜態(tài)平衡外形作為初始條件,如果知道任意時刻的θs和,代入[M]和{F}就可以得到關(guān)于的方程,并用高斯消元法對方程進(jìn)行化簡得到n個非線性的方程組,然后使用Runge-Kutta[12]計(jì)算法求解。
系泊船舶的運(yùn)動方程是一組二階、非線性相關(guān)的微分方程。文中為簡化運(yùn)算采用了3 自由度數(shù)學(xué)模型,則有3個方程表示船舶在橫蕩、縱蕩和首搖方向上的運(yùn)動。在使用Runge-Kutta 計(jì)算法之前先確定一個纜索的平衡外形作為Runge-Kutta 計(jì)算法的初始條件,接著就可以計(jì)算出纜索的水平投影,與此相對應(yīng)的纜索的張力就可以從張力-位移圖[13]中查到。
對于其他時變力和力矩,如波浪力、風(fēng)力、洋流力等可以根據(jù)具體的海況計(jì)算得到,然后就可以使用Runge-Kutta法解船舶的運(yùn)動方程,這是一種自啟方法,只要提供初始條件就可以計(jì)算出每一步的結(jié)果直到所給的時間上限。若所取的計(jì)算時間比較合適,那么可以計(jì)算出x,y,α,在一個時域內(nèi)的值,所得的結(jié)果比較準(zhǔn)確。因此就可以研究任何時刻的系泊系統(tǒng),并且可以得到纜索張力與船舶橫蕩、縱蕩和首搖運(yùn)動之間的關(guān)系。
4 算例參數(shù)
選用工作水深15.2 m的浮式生產(chǎn)船的系泊系統(tǒng)為研究對象,該系泊系統(tǒng)是由6 根多組件纜索組成的多錨腿系統(tǒng)。6 根纜索間隔60°均勻布置,船舶的主尺度為60 m×18.3 m×4.3 m,吃水2.3 m,并且在1.82 m的隨機(jī)橫浪中工作。纜索長152.4 m,直徑54 mm,錨抓力為444 kN,在距錨45.7 m 處有一44.4 kN的配重。
5 結(jié) 語
1)由準(zhǔn)靜態(tài)分析可知,在船舶橫蕩以及迎流纜預(yù)緊力為89 kN 時,同時由于縱蕩和首搖運(yùn)動作用比較弱,可忽略不計(jì),只有在船舶最大橫蕩時纜索的配重才離開海底,但此時纜索的張力也只有最大值的30%,這時錨能夠提供足夠的抓力,維持系統(tǒng)的安全。
2)由動態(tài)分析可知,系泊系統(tǒng)在波動后恢復(fù)平衡的速度非常快,并且迎流纜在船舶橫蕩運(yùn)動時,每個周期的最大張力相差較小,這對研究船舶系泊纜索在隨機(jī)橫浪作用下的特性非常有意義。
3)在考慮纜索動態(tài)影響時,可以得到在船舶平均橫蕩0.55 m 時,迎流纜的平均張力為262 kN。在船舶最大橫蕩時,迎流纜的張力可達(dá)到435 kN,但相比于準(zhǔn)靜態(tài)要小,而迎流纜的平均張力卻要比準(zhǔn)靜態(tài)高111%。
4)在考慮纜索的動態(tài)影響時,背流面纜索會有更大的張力,而迎流面纜索的張力卻相對較小,同時所有纜索的平均張力都比準(zhǔn)靜態(tài)時要大。
[1]ZHANG Huo-ming,YANG Jian-min,XIAO Long-fei.A view on the hybrid model test technique for deep sea platform[J].China Offshore Platform,2004,19(5):1-6.
[2]CHILDERS.Mooring system for hostile waters[J].Petroleum Engineer,1973(5):58-70.
[3]CHILDERS.Deep water mooring-part I,environmental factors control station keeping methods[J].Petroleum Engineer,1974(10):36-58.
[4]CHILDERS.Deep water mooring-part Ⅱ,the ultradeep water spread mooring system[J].Petroleum Engineer,1974(2):108-118.
[5]CHILDERS.Deep water mooring-part Ⅲ,equipment for handling the ultradeep water spread mooring system[J].Petroleum Engineer,1975(5):114-132.
[6]NIEDZWECKI,CASARELLA.On the design of mooring lines for deep water applications[J].ASME Paper,1975:70-75.
[7]NATH,F(xiàn)ELIX.Dynamics of single point mooring in deep water[J].Waterways,Harbours & Coastal Eng.Div.,Proc.ASCE,1975:23-40.
[8]朱克強(qiáng),鄭道昌,等.非線性載荷對船中彎矩響應(yīng)的影響[J],海洋工程,2011,29(4):130-134.ZHU Ke-qiang,ZHENG Dao-chang,et al.Influence of load nonlinearity on bent moment response of amidship[J].Ocean Engineering,2011,29(4):130-134.
[9]朱克強(qiáng),等.隨機(jī)波浪下遙控潛水器(ROV)強(qiáng)非線性耦合空間運(yùn)動與纜索安全性研究[J],海洋工程,2010.28(2):95-99.ZHU Ke-qiang,et al.A study on the strong nonlinear coupling space movement of underwater tethed remotely operated vehicle & sling safety under irregular wares[J].Ocean Engineering,2010,28(9):95-99.
[10]朱克強(qiáng),黃劍.復(fù)合纜索錨泊下的Spar 平臺動態(tài)響應(yīng)分析[J].港工技術(shù),2010,47(1):8-10.ZHU Ke-qiang,HUANG Jiang.Dynamic analysis of spar platform moored by multi-component mooring line[J].Port Engineering Technology,2010,47(1):8-10.
[11]朱克強(qiáng),劉永林.深海垂直吊放纜索系統(tǒng)固有頻率和母船臨界運(yùn)動幅值快速計(jì)算方法[J].海洋工程,2009,27(2):41-45.ZHU Ke-qiang,LIU Yong-lin.Fast calculation method for the natural frequency & amplitude of surface ship critical motion of deep sea vertically tethered system[J].Ocean Engineering,2009,27(2):41-45.
[12]ZHU Ke-qiang,LIU Yong-lin,WEI Yue,et al.Dynamic response of underwater vertically suspend systems connected to the surface ship[J].Navigation of China,2009(1):21-23.
[12]ZHU Ke-qiang,ZHU Hai-yang,ZHANG Yu-song,et al.A multi-body space-coupled motion simulation for a deep-sea tethered remotely operated vehicle [J].Journal of Hydrodynamics,2008,20(2):210-215.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45