旋轉式慣導系統誤差傳播特性
2014-12-07 05:22:22尹洪亮方向紅
艦船科學技術 2014年10期
關鍵詞:系統
喬 猛,尹洪亮,方向紅,張 濱
(1.中國人民解放軍92337 部隊,遼寧 大連116023;2.中國艦船研究院,北京100192;3.中國船舶工業系統工程研究院,北京100036)
0 引 言
眾所周知,捷聯慣導系統的誤差來源包括慣性元件輸出誤差(零偏誤差、標度因數誤差、安裝誤差和隨機誤差等)、原理性誤差(圓錐誤差、劃船誤差、渦卷誤差)和計算截斷誤差,這些誤差在導航解算過程中傳播,會不同程度影響導航精度。其中,慣性元件輸出誤差是慣導系統的主要誤差源,采用旋轉調制技術可以對慣性元件輸出誤差進行有效補償,在慣性元件本身的輸出精度沒有改善的情況下提高系統的導航精度[1-5]。
并非所有的器件誤差均能夠通過旋轉被調制平均掉,研究旋轉式慣導系統誤差傳播特性有助于系統的設計[6],例如,合理的雙軸轉位方案能夠最大程度地調制掉器件誤差,從而使系統精度達到最優,而設計一個好的雙軸轉位方案必須充分了解旋轉式慣導系統的誤差特性[7-8]。本文將研究旋轉式慣導系統誤差傳播形式,并與傳統的捷聯式慣導系統進行對比,以便從原理上理解這兩類系統的差別。進一步分析對慣導系統影響最大的常值誤差經調制后的形勢,仿真驗證其調制效果。
1 單通道誤差分析
在慣導系統的誤差傳播方程中,等效北向和等效垂向陀螺漂移會造成解算經度誤差隨時間而發散,因此將陀螺漂移對系統經度誤差的影響單獨列出進行考察。忽略交叉耦合項,靜態下單通道誤差模型為:

式中:φE,φN和φU為3個姿態角;δVE為東向速度誤差;δλ為經度誤差;εE和▽N為等效北向陀螺漂移和等效北向加速度計偏置,等效東北天的元件誤差與IMU的3個軸向元件誤差有如下關系:
若僅考慮等效北向陀螺常值漂移,不考慮其余慣性元件輸出誤差、初值誤差、重力加速度誤差,略去航向角誤差。單向通道的誤差方程為:
繞航向軸旋轉后,誤差方程變為:
對式(3)和式(4)取Laplace 變換,方塊圖如圖1所示。圖中,陀螺常漂視為階躍信號


圖1 東向陀螺漂移與北向位置誤差關系框圖Fig.1 Relations block diagram of east gyro drift and north position error
由方塊圖求得無旋轉系統誤差解析式和旋轉系統誤差解析式如下:
2 旋轉慣導與捷聯慣導誤差傳播特性對比分析
類似于第1 節的分析,可以得出旋轉式慣導系統誤差方程的解析解。這里歸納出旋轉式慣導系統中器件誤差引起系統誤差的形式,與捷聯式慣導系統對比后給出表1和表2 所列出的定性結論。

表1 單軸旋轉慣導系統器件誤差引起的系統誤差Tab.1 The navigation errors of single axis rotation INS due to sensor errors
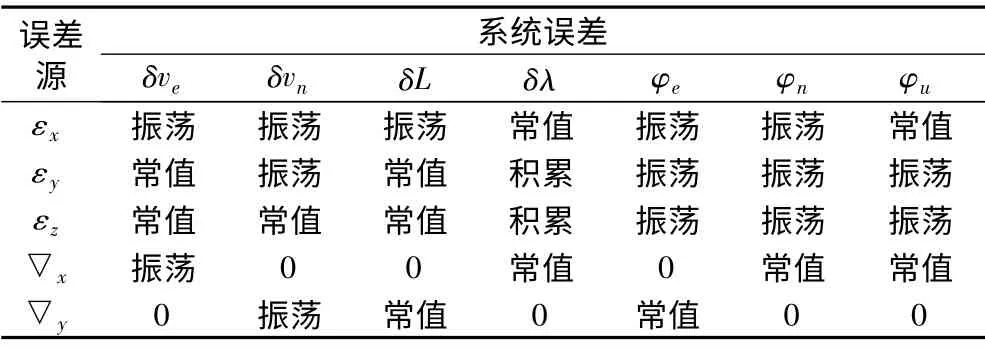
表2 捷聯式慣導系統器件誤差引起的系統誤差Tab.2 The navigation errors of strapdown INS due to sensor errors
對于捷聯式慣導系統,陀螺常值漂移和加計零位的影響有如下結論:
1)東向陀螺漂移εx對經度及方位產生常值分量εxtanL/ωie及εx/ωiecosL,它不引起隨時間積累的誤差,而對所有7個輸出導航參數均產生3 種周期振蕩的誤差。
2)北向陀螺漂移εy及方位陀螺漂移εz引起系統誤差相似,它們產生緯度常值誤差分別為εysinL/ωie及-εzcosL/ωie,還產生東向速度常值誤差-εyRcos2L 及-εzRsinLcosL。除了產生常值誤差外,它們還產生隨時間積累的經度誤差-εytcosL 及-εztsinL,這也是慣導系統定位誤差隨時間而積累的根源,也同樣對7個導航參數產生3種周期性振蕩誤差。
3)加計零位誤差引起位置δL,δλ 及姿態誤差φe,φn,φu的常值分量,而不引起速度誤差的常值分量。所以慣導系統水平精度由加計零位誤差所決定。
通過單軸旋轉調制,將部分慣導系統器件誤差調制成振蕩形式,大大減小了對系統精度的影響,主要體現在:
1)通過繞天向軸旋轉,與轉軸垂直面上的2個等效陀螺漂移被調制:東向陀螺漂移εx對方位誤差的常值誤差被調制成振蕩形式;北向陀螺漂移εy對東向速度和緯度產生的常值漂移被調制成振蕩形式;北向陀螺v 對經度產生的隨時間積累的誤差被調制成振蕩形式,大大減小了系統定位誤差隨時間積累的趨勢;東向陀螺漂移v 對經度產生的常值誤差εxtanL/ωie被調制掉,增加的常值誤差εxtanL/ωie相比εxtanL/ωie小4個數量級。
2)加計零位誤差對系統導航參數產生的常值誤差均被調制成振蕩形式。
3 旋轉對慣性器件常值誤差的調制效果分析與仿真
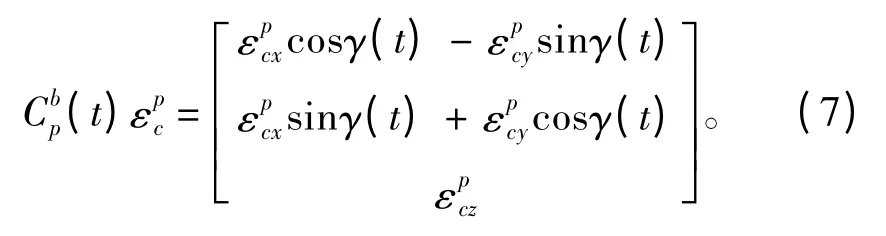
慣導系統誤差隨時間發散主要受陀螺常值漂移的影響,慣性器件常值誤差是慣導系統位置誤差發散的主要因素。為了驗證旋轉調制的效果和分析旋轉慣導系統誤差傳播特性,對慣性器件常值誤差的影響進行分析和仿真。僅考慮陀螺常值漂移=,誤差項為:
靜基座下,取陀螺常值漂移[0.01,0.01,0.01]°/h,加計常值零偏[100,100,100]μg,其他誤差為0。采用以下旋轉方案:先繞Ozb軸正轉180°,停止一段時間Ts;再反轉180°,停止Ts時間;接著反轉180°,停止Ts時間;再正轉180°,停止一段時間Ts。以上轉動次序為1個周期,之后循環不已。采樣周期1 s,仿真時間64 h。旋轉速度3°/s,停止時間Ts=100 s。分析旋轉對常值誤差的調制效果,仿真結果如圖2和圖3所示。
通過對比圖2和圖3 可見,經過單軸旋轉后,零偏誤差引起的導航誤差得到抑制。在非旋轉慣導系統中,北、天陀螺漂移引起東向速度常值誤差,從而引起經度隨時間積累的誤差,經過單軸旋轉調制,北向陀螺漂移被調制,因此經度誤差被減小1/2 左右。另一方面也得出以下結論:轉軸上等效陀螺漂移是限制單軸旋轉慣導系統的精度繼續提高的因素之一。對于雙軸旋轉,2個軸交替旋轉,所有零偏誤差均能得到調制,因此,理論上雙軸旋轉慣導系統不再有因陀螺漂移引起的隨時間累積的發散誤差項。

圖2 僅常值誤差非旋轉慣導系統仿真結果Fig.2 The simulation results of non-rotation INS only considering constant errors
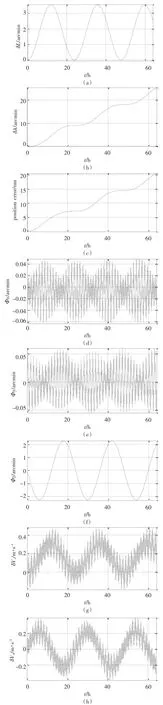
圖3 僅常值誤差旋轉慣導系統仿真結果Fig.3 The simulation results of rotation INS only considering constant errors
4 結 語
本文通過對旋轉慣導系統單通道誤差傳播特性分析,得出旋轉慣導系統與非旋轉慣導系統誤差傳播的區別,通過對比分析后,仿真驗證了慣性器件常值誤差經調制后對慣導的影響,得出結論如下:
1)旋轉調制的本質是通過轉位機構帶動慣性測量單元按設計好的方案旋轉,抵消慣性器件誤差對導航結果的影響,從而大大提高系統的精度。
2)傳統的捷聯式慣導系統中,經度誤差由于天向和北向陀螺漂移影響而隨時間發散,經過繞天向軸旋轉調制后,北向陀螺漂移對經度誤差的影響被調制掉,而旋轉軸方向上的陀螺漂移,即天向陀螺漂移對經度誤差的影響不變。
[1]LEVINSON E,GIOVANNI C S.Laser gyro potential for long endurance marine navigation[C]// IEEE Position Location and Navigation symposium,1980:115-129.
[2]LEVISON E,MAJURE R.Accuracy enhancement techniques applied to the marine ring laser inertial navigator (MARLIN)[J].Journal of The Institute of Navigation,1987,34(1):64-86.
[3]LEVISON E,HORST J,WILLCOCKS M.The next generation marine inertial navigator is here now[C]// IEEE Position Location and Navigation Symposium,1994:121-127.
[4]TUCKER T,LEVISON E.The AN/WSN-7B marine gyrocompass/navigator[C]// ION NTM 2000.Anaheim,CA,26-28 January,2000:348-357.
[5]HIBBARD R,WYLIE B,LEVISON E.Sperry marine MK-49,The world' s best ring laser gyro ship' s inertial navigation system[C]// JSDE Proceedings.Orlando,FL,November,1996.
[6]袁保倫.四頻激光陀螺旋轉式慣導系統研究[D].長沙:國防科技大學光電科學與工程學院,2007.YUAN Bao-lun.Research on rotating inertial navigation system with four-frequency differential laser gyroscope[D].Changsha:College of Opto-electronics Science and Engineering,National University of Defense Technology,2007.
[7]張宇飛,陸權聰,翁海娜.基于IMU 旋轉的船用激光導航系統分析與設計[J].海洋技術,2009,28(2):88-91.ZHANG Yu-fei,LU Quan-cong,WEN Hai-na.Analysis and design of marine RLG navigation system base on IMU rotation[J].Ocean Technology,2009,28(2):88-91.
[8]龍興武,于旭東,張鵬飛,等.激光陀螺單軸旋轉慣性導航系統[J].中國慣性技術學報,2010,18(2):149-153.LONG Xing-wu,YU Xu-dong,ZHANG Peng-fei,et al.Single-rotating inertial navigation system with ring laser gyroscope[J].Journal of Chinese Inertial Technology,2010,18(2):149-153.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32