雙機械臂反對稱結構線路巡檢機器人設計研究
2014-12-19 01:45:28鄭忠才姜振廷肖海勇
制造業自動化 2014年9期
關鍵詞:機械
董 旭,鄭忠才,高 巖,姜振廷,肖海勇
DONG Xu1,ZHENG Zhong-cai1,GAO Yan2, JIANG Zhen-ting1, XIAO Hai-yong1
(1.山東建筑大學,濟南 250101;2.山東電子職業技術學院,濟南 250014)
0 引言
輸電線路長期暴露在外部環境中會導致線路老化等缺陷,存在安全隱患,電力公司需定期對輸電線路進行檢查[1]。目前對電線路的檢查主要有地面目測法與直升飛機巡航法,前者勞動強度大,可靠性差,精度低,后者費用高,技術難度大[2]。線路巡檢機器人在輸電線路上行走時可以近距離檢測線路情況,可靠性好,實用方便。國外線路巡檢機器人的研究開展較早,并取得了一系列的成果,如日本東京電力公司的光纖復合架空地線巡檢機器人,加拿大魁北克水電研究所的LineScout移動機器人等;近年來國內在線路巡檢方面研究方面也有突破性的進展,如武漢大學研制的沿架空地線自主巡線機器人能夠自主的跨越桿塔,中科院沈陽自動化研究所研發的輪臂復合機構機器人已進入推廣階段[3]。本文所述線路巡檢機器人采用雙機械臂反對稱結構,對機器人的機械本體進行設計,針對高壓線路的導線特點,設計出適用于高壓線路的可翻轉行走及越障機構,提高機器人在線路行走時的穩定性,簡化夾持機構,減輕機器人本體的重量。
1 機器人本體結構建模
1.1 機械總體設計
雙機械臂反對稱結構線路巡檢機器人由機械本體,可伸縮機械臂,夾持行走機構,配重控制箱組成,如圖1所示。共有10個自由度,包括2個行走轉動關節,2個滾輪翻轉關節,2個手臂伸縮關節,2個手臂(箱體)移動關節,2個配重移動關節。機器人在線路上行走時要保證穩定性,雙機械臂反對稱結構可以限制滾輪在輸電線路的單方向的搖擺,增加了機器人本體的穩定性;在翻越障礙物時,需雙臂及配重相互協調,滾輪的位置固定及夾持可通過滾輪翻轉關節實現,機械臂移動越過障礙物,雙臂輪流跨越達到越障的要求。機器人的夾持及行走都是由滾輪翻轉關節及行走機構完成,在結構設計上簡化的機構,實現了機器人結構的輕量化。

圖1 雙機械臂反對稱結構線路巡檢機器人機械總體設計
1.2 機械本體及配重設計
機械本體為機械臂及控制箱體提供安裝位置,包括機械臂的移動關節,由直線導軌,限位端蓋,絲杠組成,機械本體結構如圖2所示。兩條直線導軌對稱分布,通過限位端蓋固定,絲杠在導向槽內,絲桿驅動電機安裝在限位端蓋上,通過齒輪減速輸出帶動絲杠旋轉,從而實現機械臂的移動。配重控制箱安裝在機械本體的下端,控制箱內部裝有控制模塊,電源模塊及其他檢測設備,控制箱的兩側開有導向槽,配重塊在槽內移動從而實現在越障過程中質心的調節。

圖2 機械本體設計
1.3 機械臂結構設計
可伸縮機械臂為機器人運動的連接件,連接行走滾輪與機械本體,同時調節滾輪的位置,使滾輪與線路接觸,機械臂結構如圖3所示。機械臂的伸縮動作靠位于上下臂內的絲杠與螺母的螺旋運動實現,在行走時,上下臂之間留有一定活動量,便于在越障時進行調節。機械臂的底部與機械本體的絲杠配合實現移動,頂部設計成凹面,便于架空線的放置,在凹面處表面鍍有耐磨材料,目的是增加耐磨度以及凹槽與架空線的摩擦系數,與滾輪相配合實現機器人的夾持、固定與行走;在機械臂的頂端安裝驅動電機以實現滾輪的夾持與翻轉。

圖3 機械臂設計
1.4 夾持行走機構設計
翻轉式夾持行走機構有行走滾輪、驅動電機、連接桿組成,結構如圖4所示。滾輪的凹槽面與機械臂頂端的凹槽面結構相同,鍍有耐磨材料,當槽面閉合時,滾輪與機械臂頂端完成夾持動作,滾輪驅動電機驅動滾輪轉動實現機器人在線路上行走,實現行走的要求。在行走時,為防止機器人脫線,使安裝于機械臂頂端的翻轉驅動電機停止轉動鎖定,兩臂滾輪分別配有驅動電機,在行走時,一端為主動驅動,另一端僅為從動滾輪,不產生驅動效果;在越障時,滾輪驅動電機停止并鎖定,翻轉驅動電機通過連接桿帶動滾輪的翻轉,跨越障礙物。
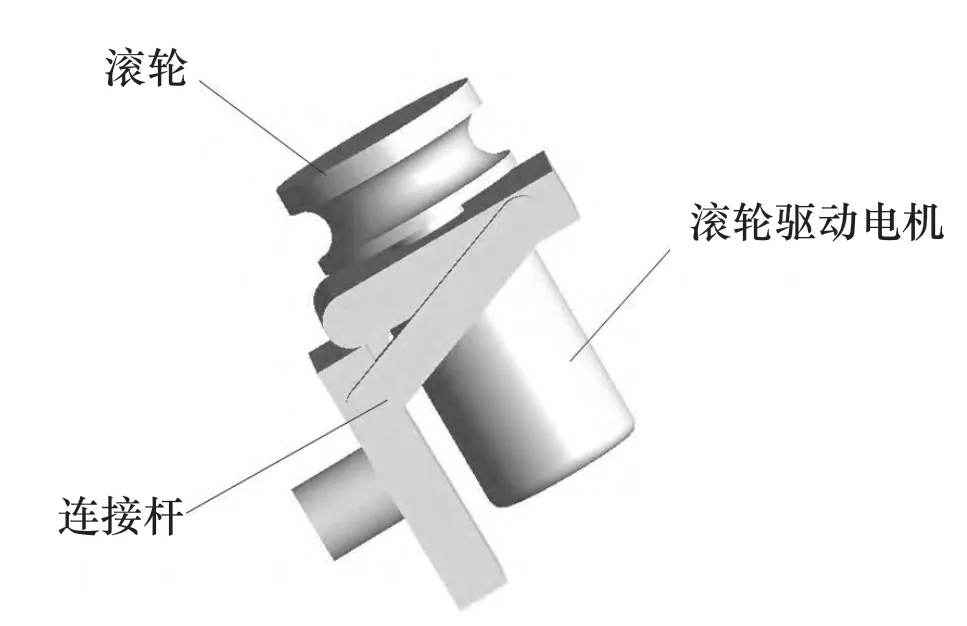
圖4 夾持行走機構
2 越障原理
機器人在巡檢過程中,遇到障礙物要自主進行躲避,雙臂通過協調,一只手臂固定于線上,另一只手臂完成脫線越障上線的動作,懸掛在架空線上的機器人由于受到風力與自身位姿的作用會產生重心的偏移,從而影響機器人的穩定性。機器人在越障的過程中對穩定性要求很高,因此,通過對夾持行走機構及配重機構設計,提高整體的穩定性,實現簡單,可靠的越障方式。
越障的過程如圖5所示,當機器人檢測到間隔棒時,手臂B關聯的驅動電機停止驅動,鎖定位置,手臂A的滾輪驅動電機停止鎖定,翻轉驅動電機通過連接桿帶動滾輪的翻轉,完成脫線動作,同時上下臂收縮,機械本體的絲杠轉動使手臂A向前移動,跨越間隔棒,絲杠驅動電機停止驅動,上下臂拉伸,當手臂A檢測到導線時,鎖定位置,翻轉驅動電機驅動連接桿實現滾輪的夾持,當手臂A的越障動作完成后,通過機械本體的絲杠驅動電機轉動調整機器人在輸電線上位置,手臂A關聯的驅動電機停止轉動,鎖定位置;手臂B按照相同的越障原理進行跨越間隔棒,完成跨越后,機械本體的絲杠驅動電機再次轉動,調整機器人在輸電線上位置,使其達到穩定狀態,此時,越障過程完畢,手臂B滾輪驅動電機驅動行走,手臂A的滾輪從動前進,絲杠驅動電機與翻轉驅動電機鎖定,機器人開始在線路上行走。

圖5 越障過程
3 控制系統
機器人的控制系統采用模塊化設計,包括信息采集模塊,控制模塊,無線通訊模塊,驅動模塊,如圖6所示。信息采集模塊由超聲波傳感器和微型攝像頭模塊組成,超聲波傳感器用于行走時檢測障礙物以及在越障時檢測輸電線的位置,通過微型攝像機反饋線路情況,控制模塊采用TMS320F2812數字訊號處理器進行信號的處理,由驅動模塊執行末端電機驅動;地面控制主機用于技術人員在地面對機器人發送指令,接收反饋圖像信號,與機器人的控制模塊通過無線通訊模塊ZigBee設備進行數據傳輸。

圖6 控制系統設計
4 結論
本文通過對雙機械臂反對稱結構線路巡檢機器人各部分進行結構設計,提出一種新型的夾持行走機構的線路巡檢機器人,并對越障過程進行論述,對控制系統進行模塊化設計,實現了機器人在線路上的行走及越障的功能,簡化機械結構,達到輕量化的目的,對未來線路巡檢機器人的發展提供可選方案。
[1]王吉岱,謝永,王鳳芹.高壓輸電線路巡檢機器人機械本體設計[J].機械設計與制造,2007,17(8):124-126.
[2]孫崔蓮,王洪光,趙明揚,等.超高壓線巡檢機器人移動越障機構綜述[J],機械設計與制造,2006,(10):161-163.
[3]吳功平,李誠,馬玉林,等.高壓電網巡檢機器人研究及應用綜述[A].2009年全國輸變電設備狀態檢修技術交流研討會論文集[C].2011.
[4]張運楚,梁自譯,譚民.架空電力線路巡線機器人的研究綜述[J].機器人.2004,26(5):467-473.
[5]王魯單,王洪光,房立金,等.輸電線路巡檢機器人越障控制研究[J].中國機械工程.2007,18(22).
[6]李向東,魯守銀,王宏,等.一種智能巡檢機器人的體系結構分析與設計[J].機器人.2005(06).
[7]吳功平,肖曉輝,郭應龍,等.架空高壓輸電線自動爬行機器人的研制[J].中國機械工程.2006,17(3).
[8]付雙飛,王洪光,房立金,等.超高壓輸電線路巡檢機器人越障控制問題的研究[J].機器人.2005(7):341-345.
[9]Wu Gongping,ZHENG Tao,XIAO Hua,et al.Navigation,location and non-collision obstacles overcoming for high-voltage power transmission-line inspection robot[C]// Mechatronics and Automation,2009.ICMA 2009.International Conference,2009,5(19-23):2014-2020.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
