基于模糊理論的車型識別在不停車收費系統中的應用
2014-12-24 06:53:38鄭曉彥劉帥卿
科技視界 2014年20期
關鍵詞:汽車
鄭曉彥 劉帥卿
(鄭州信息科技職業學院,河南 鄭州450046)
0 引言
隨著社會的發展,我國所擁有的汽車數量與日俱增,伴隨而來的城市交通擁擠問題也日益嚴重, 交通的擁擠不僅影響人們的出行、工作和學習,在排隊等待繳費的汽車所排放的尾氣也會污染環境,因此快速對過路車輛進行車型識別對于緩解交通壓力, 抑制環境污染具有重要的意義和作用,模式識別的方式有很多種,如:紅外線探測法[1],傳感器識別法,視頻圖像識別法[2],這些識別方式需要安裝大量的設備,而且需要經常維護, 基于神經網絡的車型模式識別方法算法復雜又難以實現。 而基于模糊理論的模式識別方法不需要安裝太多的設備,不需要經常維護,算法也很簡單,相對于上面所介紹的識別方法擁有很大的優勢。
1 模糊理論車型識別方法的研究
1.1 模糊理論識別的流程
由于在電子不停車收費系統中汽車是運動著的,要想得到汽車清晰的圖像是很難的,在進行車型識別的時候我們只要得到車型相關的特征信息我們就可以對車型進行準確判斷,因此我們只需要在汽車通過電子不停車收費車道時對車輛在不同的時候進行圖像抓拍,然后經過電腦的處理和分析,就能得到車輛的特征的信息,從而判斷出車輛的具體的車型。 具體的過程如圖1 所示:

圖1 模糊車型模式識別流程圖
1.2 圖像的處理
我們通過攝像機所抓拍的圖像是彩色圖像,計算機不便于做進一步的處理,因此我們要將得到的彩色圖像轉化成灰色圖像,圖像的灰度化處理是將彩色圖片的R、G、B 的值轉換相對應的另一組數值,轉化后的數值映射出不同的灰度值, 轉化的過程是采用加權平均的方法。 首先我們應該給R、G、B 賦予不同的權值,然后將它們進行加權平均就能得到灰度值,通過大量驗證明,當Wr=0.30,Wg=0.59,Wb=0.11 時,所得到的灰色圖像最為合適,灰度化的公式為W=Wr*R+Wg*G+Wb*B。
當我們得到灰色圖片以后,下一步要做的就是得到能夠判斷出車輛類型的特征信息,也就是說圖像中不包括特征信息的部分對我們來說是次要的, 我們只需要將包含特征信息的部分給突出出來就行,而對于那些不包括特征的信息,通過技術手段對其進行衰減,已達到突出特征信息的目的,我們所得到的圖像雖然不一定與原圖相近,但是卻把圖像的特征信息給完全保留下來了,這樣就能增強圖像的可讀性。
1.3 特征信息的提取
我們對于特征信息的提取所采用的方法主要的差影法,差影法是指將不同時刻所得到的圖像進行相減, 假如所處的外部條件一致,當兩幅圖像進行相減時,灰度值相同的部分抵消,留下的灰度值不同的部分,這說明了汽車發生了移動,因此我們對連續時間上前后兩幀灰度圖像進行相減運算,然后再將結果在連續拍照的時間段上進行積分運算,所得到的圖像就是整個車子的輪廓,我們就可以從得到的灰度圖像中提取出車輛的特征信息。 假設連續的兩幀圖像為f(k-1)(x,y)和f(k)(x,y),則相鄰兩幀圖像的絕對差灰度圖像d(k-1,k)(x,y)如下所示

1.4 模糊理論模式的建立
根據我國的標準, 汽車可以大致分成下面這幾種類型: 客車、轎車、越野車、載貨汽車、牽引車和掛車。汽車的外形多種多樣,但都可以歸納到上述的類型當中,我們將車頂長度與車底前后輪之間距離的比值和車頂到地面的距離與車底前后輪之間距離的比值建立兩個模糊子集,然后根據隸屬度函數公式,就可以將這六種車型給識別出來。
一般來說, 客車車頂長度與車底前后輪距離之比特點最為明顯,一般在1:1 以上,載貨汽車、牽引車和掛車車頂長度與車底前后輪距離之間的比值一般在2:5 以下,轎車和越野車的車頂長度與前后輪之間距離的比值在2:5 和1:1 之間,這樣就能將(客車)、(轎車和越野車)和(載貨汽車、牽引車和掛車)這三個模糊子集[3]區分開來,然后再根據車頂到地面的距離和車底前后輪之間距離的比值,就可以將轎車和越野車區分開來,也能將載貨汽車、牽引車和掛車區分開來。
我們將車頂長度(Top-Lengh) 記作T, 車底前后輪之間的距離(Bottom-Lengh)記作B,將車輛頂部到地面的距離(Height)記作H。
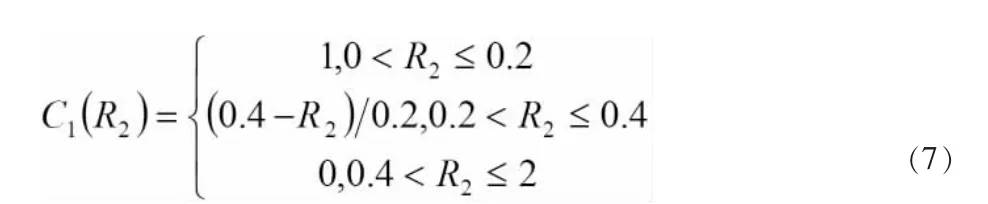
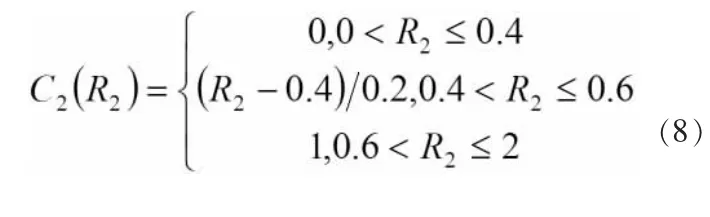
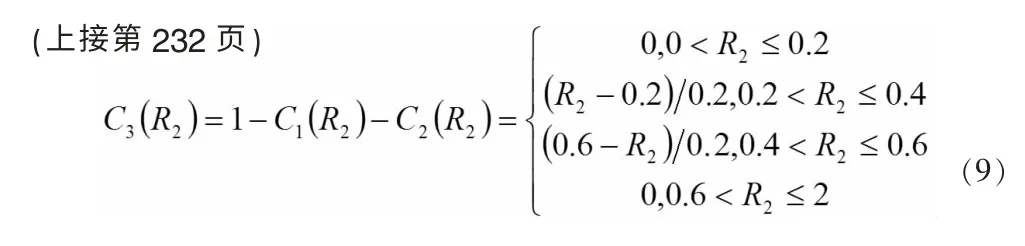
根據上問的論述,我們把車頂長度與車底前后輪之間距離的比值(T/B)作為一個論域,顯然0<T/B<2,可以建立起三個模糊子集,即A1{載貨汽車、牽引車、掛車},A2 {客車},A3{轎車、越野汽車},并令R1=T/B,然后將車頂距離地面的距離與車底前后輪之間距離的比值作為另一個論域,同理0<H/B<2,可以建立起五個模糊子集,B1{轎車},B2{越野車},C1{掛車},C2{牽引車},C3{載貨汽車}。 令R2=H/B。
然后建立客車、載貨汽車、牽引車、掛車、轎車和越野汽車的隸屬度函數[4],六種車頂隸屬度函數的示意圖和六種車型隸屬度函數公式如圖2-圖4 所示:
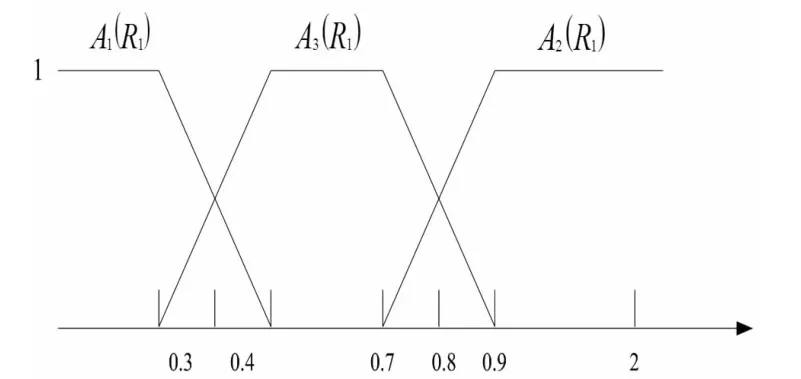
圖2 六種車型最大隸屬度函數示意圖
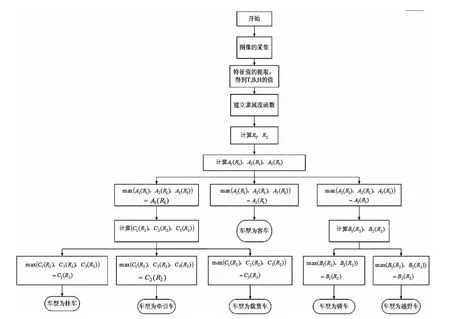
圖5 車型模糊識別流程圖
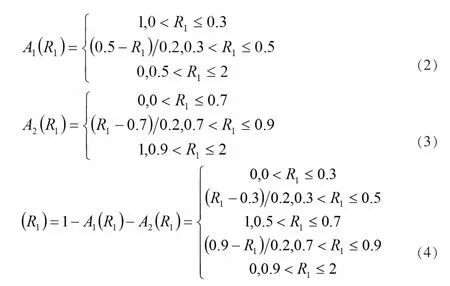
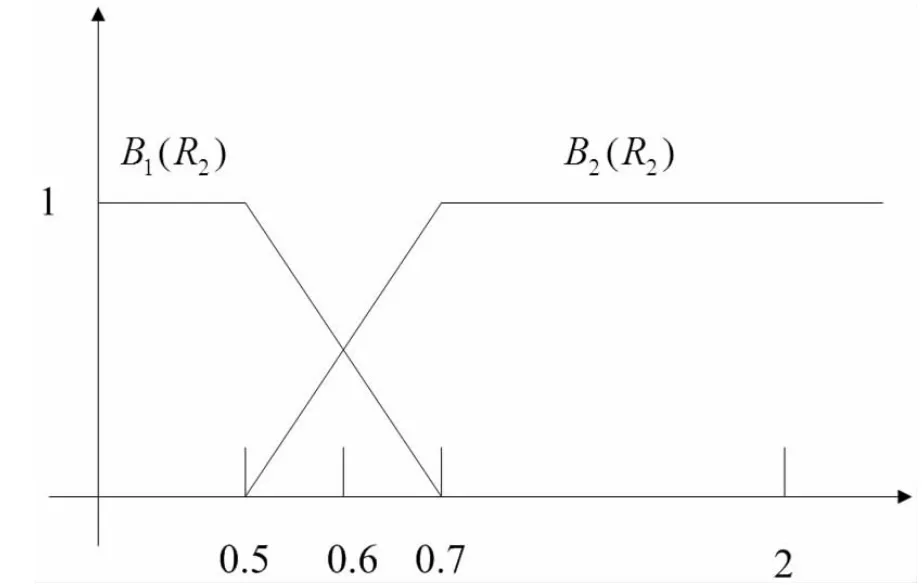
圖3 轎車和越野車的最大隸屬度函數示意圖
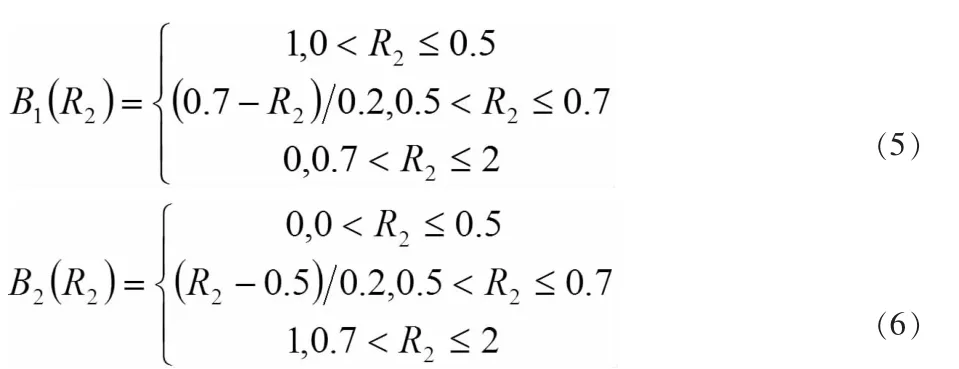
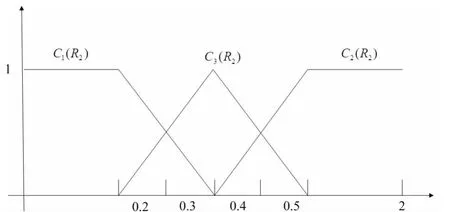
圖4 掛車、牽引車和載貨汽車的最大隸屬度函數示意圖
根據上述的公式,通過由圖像所得到的汽車的特征信息,就可以將這六種車型區別開來,具體的過程如下:
首先我們采集到車輛的彩色圖像,然后將彩色圖像轉換成灰色圖像,然后根據差影檢測法將車輛的大致輪廓呈現出來,然后對該圖像進行特性信息的提取即車輛頂部的長度, 車底前后輪之間的距離,車齡頂部距離地面的長度,由此我們可以得到R1,R2 的值,我們就可以根據隸屬度公式計算出A1(R1),A2(R1)和A3(R1),如果A2(R1)的值最大, 根據最大隸屬度原則, 我們就可判斷出該車輛是客車, 如果A1(R1)的值最大,我們只可以判斷出該車輛是掛車、牽引車和載貨汽車其中的一種類型,如果想確定車輛的準確類型,我們需要計算R2,然后再計算出C1(R2),C2(R2),C3(R2)的值,同理根據最大隸屬度原則,哪個函數值大,哪個函數所對應的車型就是待測車型,同理如果第一次識別出的是轎車和越野汽車中的一種,那么需要根據B1(R1),B2(R2)的值來確定待測車輛的車型,具體的識別流程如圖5 所示。
2 結論
通過模糊理論建立的模式識別方法計算量小,所需要的外部器材少,因此維修的費用少,而車型識別所需要的時間也短,從成本和效率方面來看基于模糊理論的車型識別技術都有著無可比擬的優勢,因此該技術在電子不停車收費系統的有著巨大的發展前景。
[1]牟瑛.車型自動分類識別系統[J].微計算機應用,2006,4.
[2]田保慧.智能交通系統中自動車型識別技術的研究[D].西安電子科技大學,2008.
[3]楊俊.基于模糊理論的車型識別[J].計算機與信息技術,2007,3:68-70.
[4]楊綸標,高英儀.模糊數學原理及應用[M].廣東:華南理工大學出版社,,2006.
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50