BP與小波神經(jīng)網(wǎng)絡(luò)短時(shí)交通流預(yù)測(cè)對(duì)比研究
2014-12-25 05:55:44孫結(jié)松
科技視界 2014年24期
王 健 孫結(jié)松
(江蘇緯信工程咨詢有限公司,江蘇 南京 210014)
0 引言
隨著經(jīng)濟(jì)、社會(huì)的發(fā)展,越來越多的人選擇使用小汽車出行,導(dǎo)致城市交通壓力迅速增大,許多大城市如北京、上海的交通不堪重負(fù),好在近年來很多國內(nèi)的學(xué)者開始急切關(guān)注交通問題,提出很多解決的方案。智能交通系統(tǒng)(intelligent transportation system,ITS)作為一種實(shí)時(shí)、高效、準(zhǔn)確、便民的交通系統(tǒng)開始作為解決交通問題的新手段進(jìn)入人們的視野,很多專家預(yù)言未來要想緩解城市交通壓力,ITS 具有非常重要的作用。
交通流預(yù)測(cè)是城市交通控制和誘導(dǎo)的基礎(chǔ)。只有在全面提前掌握城市各路段交通動(dòng)向,決策人員才能據(jù)此做出準(zhǔn)確的判斷,合理調(diào)配交通流。交通流預(yù)測(cè)是指根據(jù)現(xiàn)有的交通流數(shù)據(jù),預(yù)測(cè)下一時(shí)刻(最多為5min)的交通流量、交通速度、交通密度。本文重點(diǎn)研究如何預(yù)測(cè)下一時(shí)刻(取15min)交通流量。
短時(shí)交通流預(yù)測(cè)研究受到廣泛關(guān)注,現(xiàn)已發(fā)展了很多成熟的理論方法。典型的預(yù)測(cè)方法是以統(tǒng)計(jì)分析方法為基礎(chǔ),但由于短時(shí)交通流往往具有迅速而劇烈波動(dòng)且體現(xiàn)頻繁的交通擁堵的特征[1],所以短時(shí)交通流數(shù)據(jù)常常是非線性的,通過數(shù)據(jù)分析,其非線性特征在早晚高峰期尤為明顯。所以這些以線性預(yù)測(cè)為基礎(chǔ)的方法往往預(yù)測(cè)精度不高,結(jié)果不理想。為適應(yīng)短時(shí)交通流變化的非線性性,出現(xiàn)了一些改進(jìn)的模型,比較成功的是卡爾曼濾波等方法。
隨著數(shù)學(xué)研究的進(jìn)展,許多非線性理論方法被應(yīng)用于短時(shí)交通流預(yù)測(cè),針對(duì)短時(shí)交通流變化的隨機(jī)性和非線性性,出現(xiàn)了以神經(jīng)網(wǎng)絡(luò)、模糊理論、混沌理論和元胞自動(dòng)機(jī)等非線性系統(tǒng)理論為基礎(chǔ)的非線性預(yù)測(cè)模型[2],也有一些學(xué)者通過仿真和神經(jīng)網(wǎng)絡(luò)相結(jié)合的方法對(duì)此進(jìn)行深入研究[3]。由于小波神經(jīng)網(wǎng)絡(luò)可避免BP 神經(jīng)網(wǎng)絡(luò)等結(jié)構(gòu)設(shè)計(jì)上的盲目性,并且網(wǎng)絡(luò)權(quán)系數(shù)線性分布和學(xué)習(xí)目標(biāo)函數(shù)的凸性,使網(wǎng)絡(luò)訓(xùn)練過程從根本上避免了局部最優(yōu)等非線性優(yōu)化問題,同時(shí)兼有較強(qiáng)的函數(shù)學(xué)習(xí)和推廣能力[4],固本文重點(diǎn)研究基于小波神經(jīng)網(wǎng)絡(luò)的短時(shí)交通流預(yù)測(cè),并對(duì)比BP 神經(jīng)網(wǎng)絡(luò),以比較兩者的差異。
1 小波神經(jīng)網(wǎng)絡(luò)
1.1 小波理論
小波分析是針對(duì)傅里葉變換的不足發(fā)展而來,小波變換經(jīng)常和傅里葉變換做比較,在那里信號(hào)用正弦函數(shù)的和來表示。主要的區(qū)別是小波在時(shí)域和頻域都是局部的,而標(biāo)準(zhǔn)的傅里葉變換只在頻域上是局部的。短時(shí)距傅里葉變換(Short-time Fourier transform)(STFT)也是時(shí)域和頻域都局部化的,但有些頻率和時(shí)間的分辨率問題,而小波通常通過多分辨率分析給出信號(hào)更好的表示。小波變換計(jì)算復(fù)雜度上也更小,只需要O(N)時(shí)間,而不是快速傅里葉變換的O(N log N),N 代表數(shù)據(jù)大小[5]。
1.2 小波神經(jīng)網(wǎng)絡(luò)
1.2.1 小波函數(shù)構(gòu)建
小波神經(jīng)網(wǎng)絡(luò)是一種以BP 神經(jīng)網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)為基礎(chǔ),把小波基函數(shù)作為隱含層節(jié)點(diǎn)的傳遞函數(shù),信號(hào)前向傳播同時(shí)誤差反向傳播的神經(jīng)網(wǎng)絡(luò)。設(shè)x(k)為小波神經(jīng)網(wǎng)絡(luò)的輸入?yún)?shù)向量,Y(m)是小波神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)輸出向量,ωij 和ωjk 為小波神經(jīng)網(wǎng)絡(luò)權(quán)值。
則隱含層輸入計(jì)算公式為:
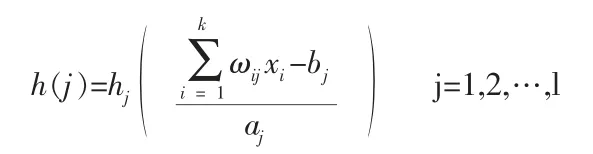
式中h(j)為隱含層第j 個(gè)節(jié)點(diǎn)輸出值;ωij 為輸入層和隱含層連接權(quán)值;bj 為小波基函數(shù)hj 的平移因子;aj 為小波基函數(shù)hj 的伸縮因子;hj 為小波基函數(shù)。
本文采用的小波基函數(shù)為Morlet 母小波基函數(shù),數(shù)學(xué)公式為:
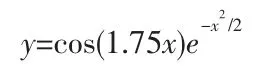
函數(shù)圖形如圖1:
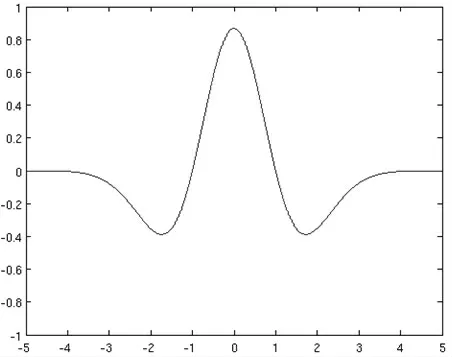
圖1
小波神經(jīng)網(wǎng)絡(luò)輸出層計(jì)算公式為:

式中ωik為隱含層到輸出層權(quán)值;h(i)為第i 個(gè)隱含層節(jié)點(diǎn)的輸出;l為隱含層點(diǎn)數(shù);m 為輸出層節(jié)點(diǎn)數(shù)。
1.2.2 小波神經(jīng)網(wǎng)絡(luò)參數(shù)修正
小波神經(jīng)網(wǎng)絡(luò)權(quán)值參數(shù)修正類似于BP 神經(jīng)網(wǎng)絡(luò)權(quán)值修正算法,采用梯度修正法修正網(wǎng)絡(luò)的權(quán)值和小波基函數(shù)參數(shù),從而使小波神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)輸出不斷逼近期望輸出。修正過程如下:
(1)計(jì)算網(wǎng)絡(luò)誤差
式中yn(k)為實(shí)際輸出;y(k)為小波神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)輸出。
(2)根據(jù)預(yù)測(cè)誤差e 修正小波神經(jīng)網(wǎng)絡(luò)權(quán)值和小波基函數(shù)系數(shù)

式中,η 為學(xué)習(xí)速率。
1.2.3 小波神經(jīng)網(wǎng)絡(luò)算法步驟
步驟1:網(wǎng)絡(luò)初始化。隨機(jī)初始化小波函數(shù)伸縮因子ak、平移因子bk以及網(wǎng)絡(luò)連接權(quán)值ωij、ωjk,設(shè)置網(wǎng)絡(luò)學(xué)習(xí)速率。
步驟2:計(jì)算預(yù)測(cè)輸出、網(wǎng)絡(luò)實(shí)際和預(yù)測(cè)誤差e。
步驟3:權(quán)值修正。根據(jù)誤差e 修正網(wǎng)絡(luò)權(quán)值和小波函數(shù)參數(shù),使網(wǎng)絡(luò)預(yù)測(cè)值逼近實(shí)際值。
步驟4:判斷算法是否結(jié)束,如果沒有,返回步驟2。
1.3 小波神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)短時(shí)交通流量
(1)建立如圖1 所示神經(jīng)網(wǎng)絡(luò)模型。
(2)根據(jù)得到的交通流量數(shù)據(jù)樣本,進(jìn)行數(shù)據(jù)處理,并選擇一部分作為訓(xùn)練樣本,一部分為測(cè)試樣本。
(3)利用訓(xùn)練樣本對(duì)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,隱含層函數(shù)采用小波函數(shù)。
(4)利用訓(xùn)練好的網(wǎng)絡(luò)進(jìn)行預(yù)測(cè),并比對(duì)實(shí)際交通量。
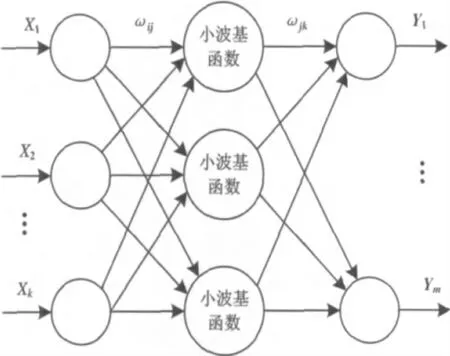
圖2 小波神經(jīng)網(wǎng)絡(luò)模型
2 實(shí)例分析
預(yù)測(cè)實(shí)例所采用的數(shù)據(jù)采自南京市交管局調(diào)查的某關(guān)鍵路段流量。有288+96 組數(shù)據(jù)樣本。其中每組數(shù)據(jù)間隔15min,前288 組用于訓(xùn)練網(wǎng)絡(luò),后96 組用于測(cè)試網(wǎng)絡(luò)準(zhǔn)確性。
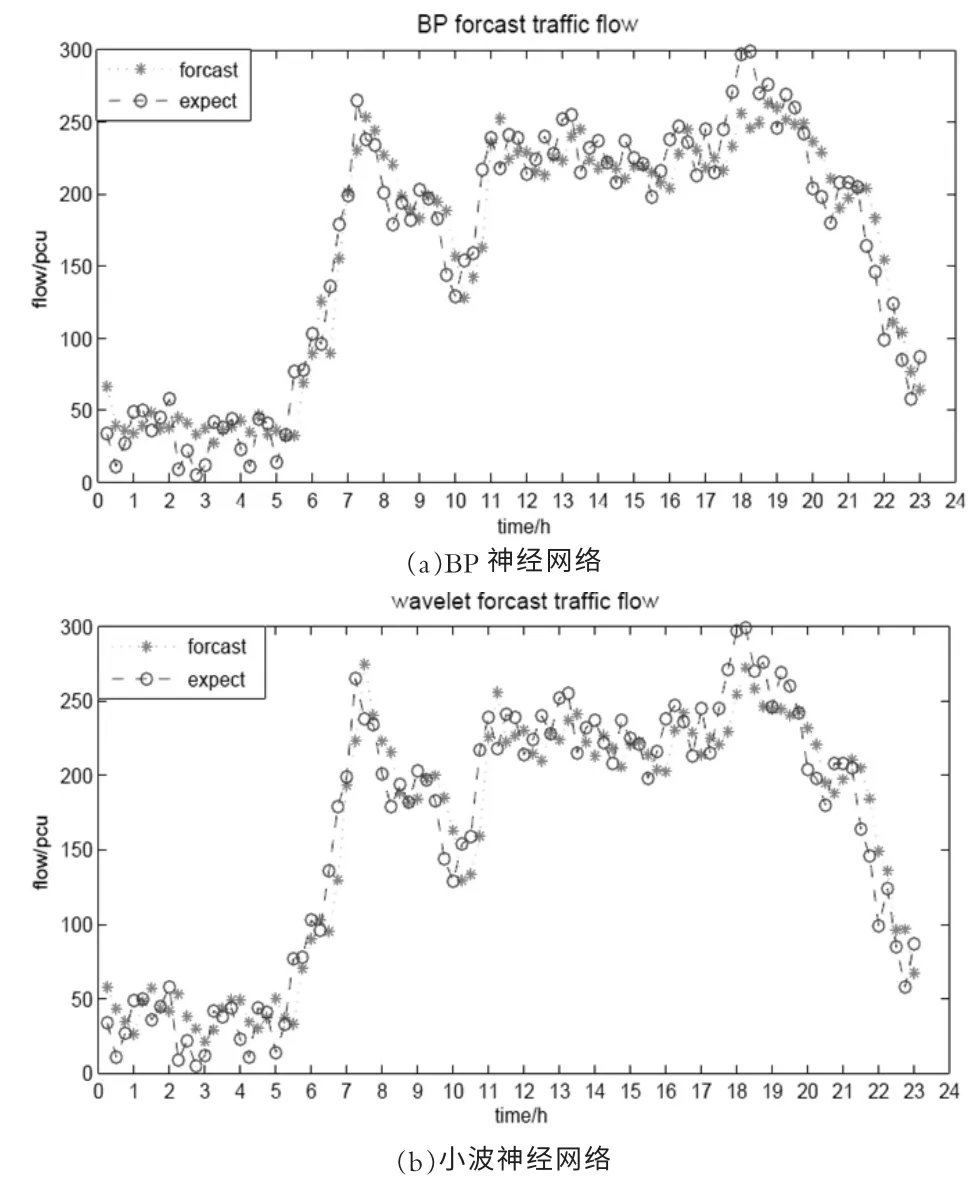
圖3 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)輸出
2.1 BP 與小波神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)結(jié)果
傳統(tǒng)BP 神經(jīng)網(wǎng)絡(luò)目前已較為成熟[6],構(gòu)建結(jié)構(gòu)為4-5-1 的三層BP 網(wǎng),利用Matlab 神經(jīng)網(wǎng)絡(luò)工具箱newff、sim、train 三個(gè)主要函數(shù)進(jìn)行預(yù)測(cè)。由于是對(duì)比小波神經(jīng)網(wǎng)絡(luò)的準(zhǔn)確性,所以并沒有對(duì)這些函數(shù)的參數(shù)進(jìn)行討論和改變,均采用默認(rèn)值。小波神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)三層網(wǎng)絡(luò),分別為4 個(gè)節(jié)點(diǎn)的輸入層、6 個(gè)節(jié)點(diǎn)的隱含層、一個(gè)節(jié)點(diǎn)的輸出層。
根據(jù)上述理論,兩者預(yù)測(cè)流量與實(shí)際流量如圖3、預(yù)測(cè)誤差如圖4,誤差百分如圖5。
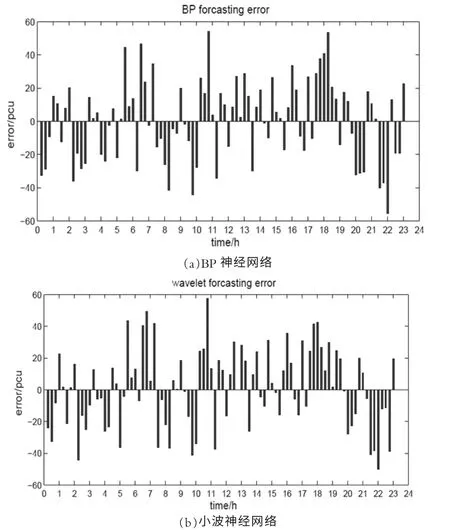
圖4 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)誤差

圖5 神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)誤差百分比
2.2 預(yù)測(cè)準(zhǔn)確性分析
由兩種方法預(yù)測(cè)的流量對(duì)比實(shí)際流量分析可得,在6:00-22:00 這個(gè)時(shí)段預(yù)測(cè)較為準(zhǔn)確,這段時(shí)期相比其他時(shí)間段交通量較大,是人們出行活動(dòng)的主要時(shí)期,在這個(gè)時(shí)間段預(yù)測(cè)準(zhǔn)確是至關(guān)重要的。夜間(22:00-6:00)這段時(shí)期可能車流較少,隨機(jī)性較大,造成預(yù)測(cè)的誤差加大。本文沒有更多數(shù)據(jù)檢驗(yàn),實(shí)為一種遺憾。綜上來看,神經(jīng)網(wǎng)絡(luò)在預(yù)測(cè)短時(shí)交通流時(shí)具有較高的準(zhǔn)確性。
定性的分析預(yù)測(cè)方法的準(zhǔn)確性還不夠,為了檢驗(yàn)各種方法的預(yù)測(cè)精度,本次案例誤差結(jié)果對(duì)比指標(biāo)采用平均絕對(duì)誤差(mean absolute deviation,MAD,表示預(yù)測(cè)值與實(shí)測(cè)值得實(shí)際偏差絕對(duì)值的均值)、平均絕對(duì)百分比誤差(mean absolute percentage error,MAPE,表示預(yù)測(cè)值與實(shí)測(cè)值得實(shí)際偏差絕對(duì)值占實(shí)測(cè)值百分比的均值)。
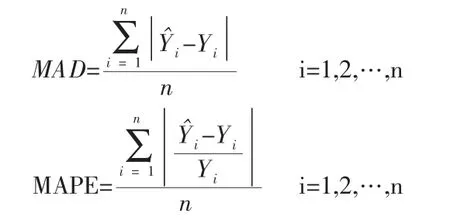
MAD 與標(biāo)準(zhǔn)偏差類似,但更容易求的。MAD 能較好的反映預(yù)測(cè)的精度,但它不容易衡量無偏性。MAD 與MAPE 常用來衡量預(yù)測(cè)誤差,但單一的指標(biāo)很難全面地評(píng)價(jià)一個(gè)預(yù)測(cè)模型,所以本次這2 個(gè)指標(biāo)全部選用來檢驗(yàn)預(yù)測(cè)精度。
本次BP 神經(jīng)網(wǎng)絡(luò)和小波神經(jīng)網(wǎng)絡(luò)的MAD 與MAPE 指標(biāo)如表1 所示。
由表1 可以看出,兩種方法預(yù)測(cè)的交通量誤差在20 左右,相比人們活動(dòng)時(shí)期的交通量不算太大,MAPE 如此高是由于部分時(shí)間車流較小,預(yù)測(cè)誤差百分比很容易超過1。總體來說小波神經(jīng)網(wǎng)絡(luò)優(yōu)于BP 神經(jīng)網(wǎng)絡(luò),但優(yōu)勢(shì)不明顯,可選用其他母小波做隱含層基函數(shù)或使用增加動(dòng)量項(xiàng)修正網(wǎng)絡(luò)參數(shù)的算法,來提高網(wǎng)絡(luò)學(xué)習(xí)效率。
3 結(jié)論
本文主要分析了小波變換的特點(diǎn)、原理,并以Morlet 母小波作為神經(jīng)網(wǎng)絡(luò)隱含層基函數(shù)構(gòu)建了小波神經(jīng)網(wǎng)絡(luò),對(duì)數(shù)據(jù)進(jìn)行預(yù)測(cè)分析,并比對(duì)了傳統(tǒng)的BP 神經(jīng)網(wǎng)絡(luò),發(fā)現(xiàn)神經(jīng)網(wǎng)絡(luò)作為一種新型預(yù)測(cè)技術(shù),具有一定的準(zhǔn)確性,但無論是BP 神經(jīng)網(wǎng)絡(luò)還是小波神經(jīng)網(wǎng)絡(luò)都不夠完善[7],短時(shí)交通流預(yù)測(cè)作為未來交通管理的基礎(chǔ),今后還應(yīng)有越來越多的神經(jīng)網(wǎng)絡(luò)模型應(yīng)用在交通流預(yù)測(cè)上,發(fā)展更適合的算法以得到更準(zhǔn)確的預(yù)測(cè)結(jié)果。
[1]孫湘海,劉潭秋.基于非線性時(shí)間序列模型的城市道路短期交通流預(yù)測(cè)研究[J].土木工程學(xué)報(bào),2008(1):104-109.
[2]邵春福,熊志華,姚智勝.道路網(wǎng)短時(shí)交通需求預(yù)測(cè)理論、方法及應(yīng)用[M].北京:清華大學(xué)出版社,2011.
[3]沈穎潔,韓寶睿,劉英麗,等.基于仿真的隧道檢測(cè)器優(yōu)化布設(shè)及短時(shí)交通流預(yù)測(cè)[J].公路交通科技,2014,1:124-130.
[4]蔡念,胡匡祜,李淑宇,等.小波神經(jīng)網(wǎng)絡(luò)及其應(yīng)用[J].中國體視學(xué)與圖像分析,2001,12(4):239-245.
[5]侯霞.小波神經(jīng)網(wǎng)絡(luò)若干關(guān)鍵問題研究[D].南京航空航天大學(xué),2006.
[6]王吉權(quán).BP 神經(jīng)網(wǎng)絡(luò)的理論及其在農(nóng)業(yè)機(jī)械化中的應(yīng)用研究[D].沈陽農(nóng)業(yè)大學(xué),2011.
[7]田晶,楊玉珍,陳陽舟.短時(shí)交通流量?jī)煞N預(yù)測(cè)方法的研究[J].公路交通科技,2006(4):104-106.