基于視頻圖像處理的微觀交通數據的獲取
2014-12-26 02:12:18李珣輝鄒智軍洪智勇
交通運輸研究 2014年3期
張 瑞,李珣輝,鄒智軍,洪智勇,張 博
(1.同濟大學交通運輸工程學院,上海201804;2.新疆交通職業技術學院,新疆 烏魯木齊831401)
0 引言
智能交通系統的發展使得對交通數據的要求越來越高,交通數據包括宏觀交通數據和微觀交通數據。常用的宏觀交通數據有交通量、交通流密度、平均行程時間、OD 等,數據易采集,對精度要求不高,且采集理論和技術已較成熟,市場化程度高。宏觀交通數據是一定時間或空間的聚集,不能反映交通個體的特征,用宏觀交通數據來研究微觀層面上的交通行為是遠遠不夠的。因此,對微觀交通數據的采集和處理技術的研究變得十分迫切。
微觀交通數據的價值可以體現在以下幾個方面:
(1)應用于交通控制與誘導系統中,很多情況下需要知道車輛的實時位置和行駛狀態,或異常車輛的識別,而宏觀交通數據無法提供所需信息;
(2)用于駕駛行為理論的研究,如車道變換、超車、跟車、車輛加速、減速、沖突、交織等各種微觀駕駛行為的研究[1];
(3)用于微觀交通仿真技術,微觀交通仿真模型的標定與校正需要微觀交通數據,使仿真模型能更加符合實際情況。
本文利用視頻數據,采用圖像處理技術,獲取了車輛的行駛軌跡,得到了交通個體在道路上的實時位置信息,進一步得到了車速和車頭時距,并檢驗了車速是否近似服從正態分布。
1 基于視頻的車輛行駛軌跡獲取方法
微觀交通信息是指在一定時間和空間內,能夠完整描述每一輛車的位置屬性和運動屬性[1]。位置屬性是指車輛在某一時刻的空間位置,如坐標值;運動屬性是指車輛的瞬時車速、加減速度等特定時刻的運動狀態。利用視頻數據獲取車輛行駛軌跡的步驟如下。
(1)通過實地觀測,獲取交通視頻數據。為了準確測量車輛在圖像平面中的偏移量,觀測時要保證一組數據的背景完全相同[2]。
(2)為了獲取車輛在圖像上的位置,將視頻數據轉換成BMP 格式的圖片。本文利用Corel Videostudio(會聲會影)軟件將視頻按幀存儲為圖片格式,每秒有30 幀,即每秒視頻轉換成30 張圖片。
(3)按時間順序依次處理每張圖片,獲取每輛車在圖片上的像坐標。本文使用ScanIt軟件獲取車輛的圖像坐標,如圖1所示。
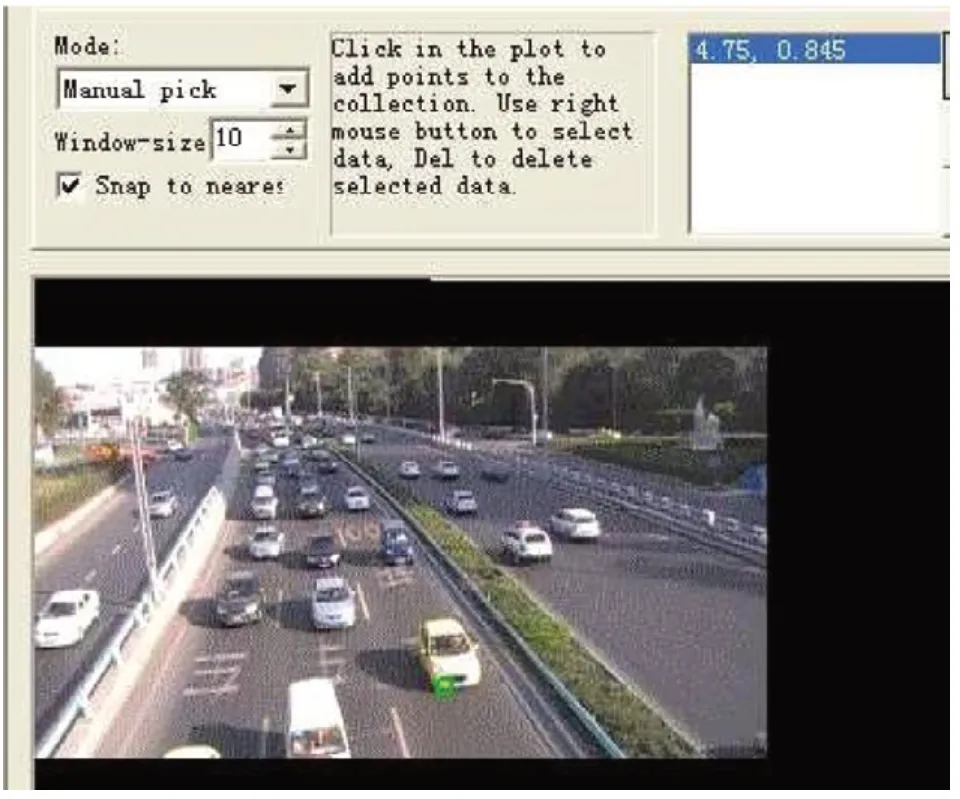
圖1 利用ScanIt獲取車輛的圖像坐標
(4)將圖像坐標轉換為實際坐標,坐標轉換原理如圖2所示。
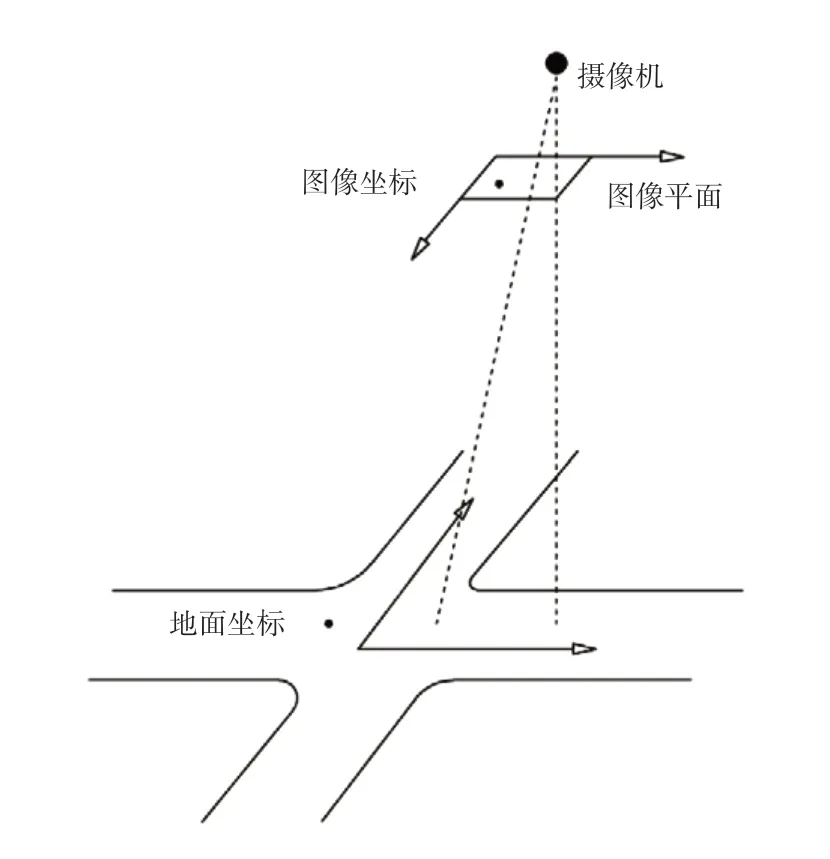
圖2 坐標轉換原理圖
由于是不在同一平面上的二維坐標系之間的轉換,因此可以用齊次坐標轉換建立圖像坐標和實際坐標之間的關系,如式(1)所示:
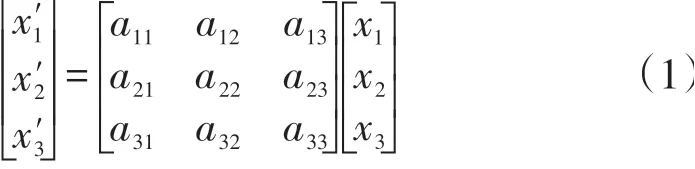
將圖像坐標(x,y)對應的齊次坐標(x,y,1)代入(1)式,得到:

整理得到:
化簡得:
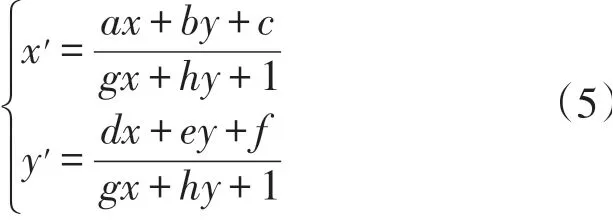
其中,(x,y)是圖像坐標;(x′,y′)是實際坐標;a,b,c,d,e,f,g,h是坐標轉換待求解參數。若已知4個點的圖像坐標和實際坐標,就可以標定出參數的值。
2 實例分析
本文選取烏魯木齊市河灘快速路為研究對象,實地拍攝了4min58s 的視頻,共轉換為8 940張圖片,經處理得到了車輛行駛軌跡、車速和車頭時距。
2.1 車輛行駛軌跡
選擇車道標線的一端(0,0)作為標定點A,向右取一個車道寬度375cm 作為標定點B,在A點圖像上方沿標線取600cm 作為標定點C,C點再向右取一個車道寬度375cm 作為標定點D。選取的4個標定點如圖3所示,標定點的圖像坐標和實際坐標如表1所示。

圖3 圖像上4個標定點的位置
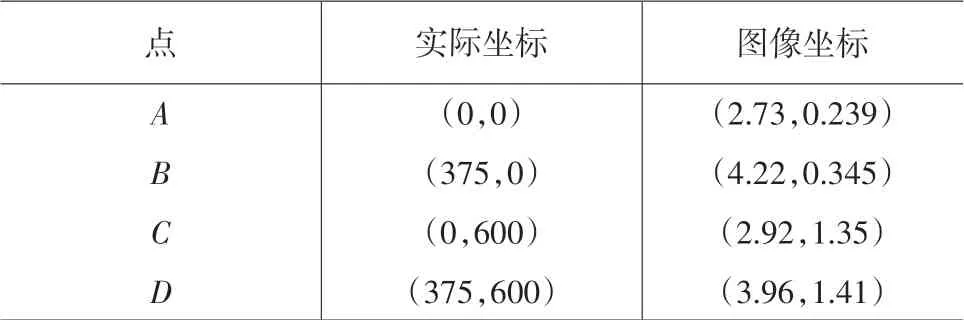
表1 標定點的實際坐標和圖像坐標
將上述4 個點的圖像坐標和實際坐標代入式(5)中,計算出參數的值分別為a=239.2054,b=-40.9082,c=-643.2538,d=-25.8768,e=363.7396,f=-16.2902,g=0.007,h=-0.2631。依 次 處 理 圖片,獲取每輛車的圖像坐標。為減小誤差應盡量選取車輛與地面接觸的點,本文選取車輛左前輪與地面接觸的點作為車輛的特定點。將圖像坐標代入式(5)就可計算出其對應的實際坐標。按時間順序處理圖片并轉換坐標就得到車輛在一段時間內的行駛軌跡,如圖4所示。
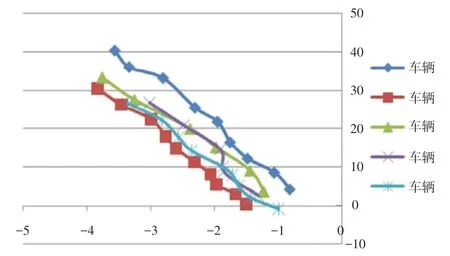
圖4 車輛行駛軌跡圖
為檢驗參數標定算法的準確性,獲取4 個點E、F、G、H的圖像坐標,代入轉換方程式(5)中,計算出在轉換系統下的實際坐標,與它們在地面上的實際坐標進行對比,檢驗坐標轉換算法的誤差,計算結果如表2所示。可以看出誤差均在3cm之內,證明本文采用的坐標轉換算法是比較精確可靠的。誤差主要是獲取像點坐標時產生的,與拍攝視頻時的天氣、攝像機的精度以及獲取圖像坐標方法的精度有關。
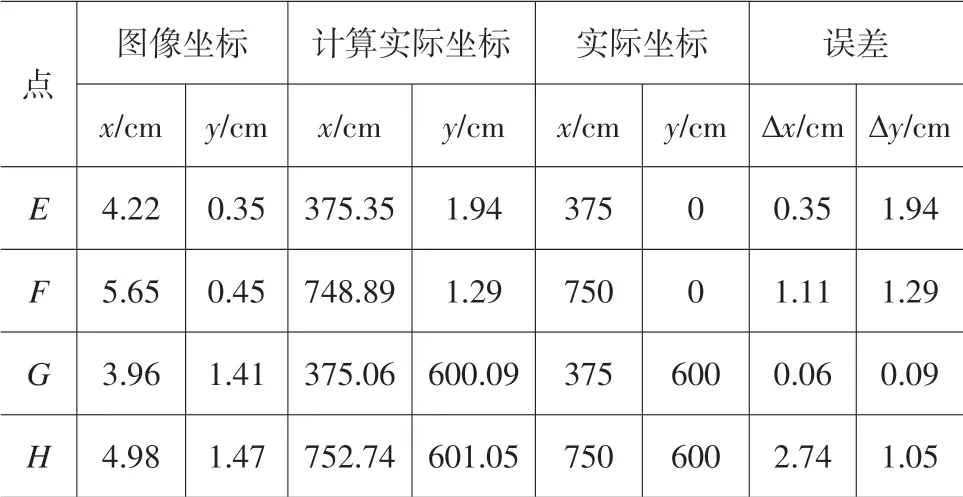
表2 坐標轉換算法誤差分析表
2.2 車速
車速是度量交通設施服務功能的一項重要指標,它綜合地反映了設施的功能、質量和服務水平的狀況,其特征對道路通行能力、交通安全、交通管理控制和道路規劃設計等有著直接的影響[4]。車輛軌跡數據反映了車輛的實時位置,據此可以計算出車輛的瞬時速度。本文處理了4min58s的視頻數據,獲取了177 個車輛樣本,其中內側車道116輛,外側車道61 輛,得到內外側車道的車速分布特征如圖5~圖7所示。
圖5 內側車道車速分布直方圖
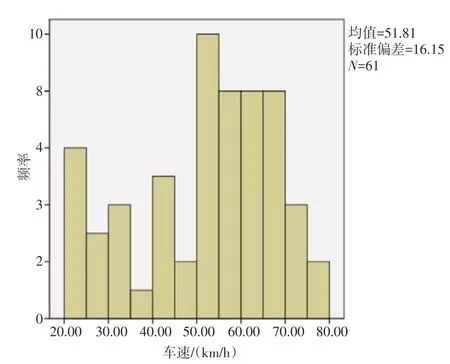
圖6 外側車道車速分布直方圖
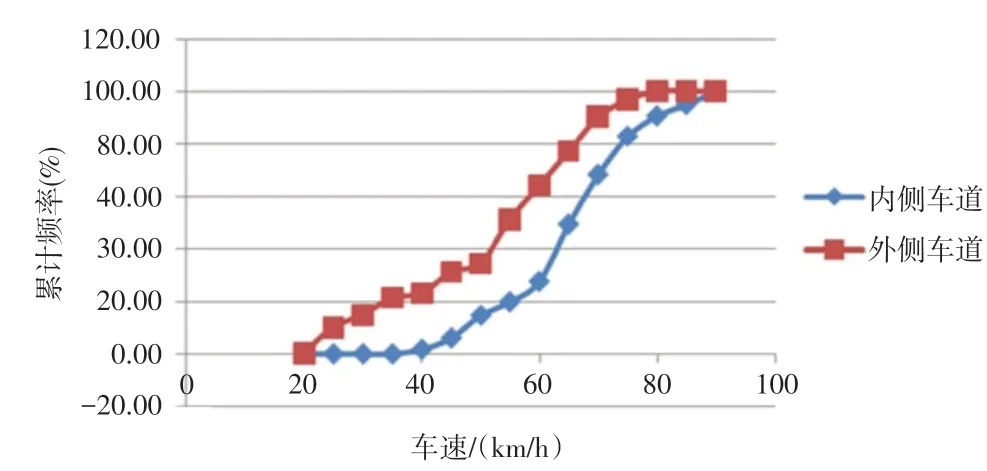
圖7 內外側車道車速累計頻率分布曲線
從圖5和圖6可以看出,車速分布的直方圖與正態分布曲線有較好的相似性,特別是內側車道。車速的正態Q-Q圖(見圖8、圖9)也顯示出期望值與觀測值有較好的吻合性(兩端的點除外)。但對數據進行正態擬合后,發現車速分布并不完全服從正態分布,而是有一定的偏態(見表3),表明車速分布呈負偏態,曲線比較平坦,車速近似服從正態分布。
2.3 車頭時距
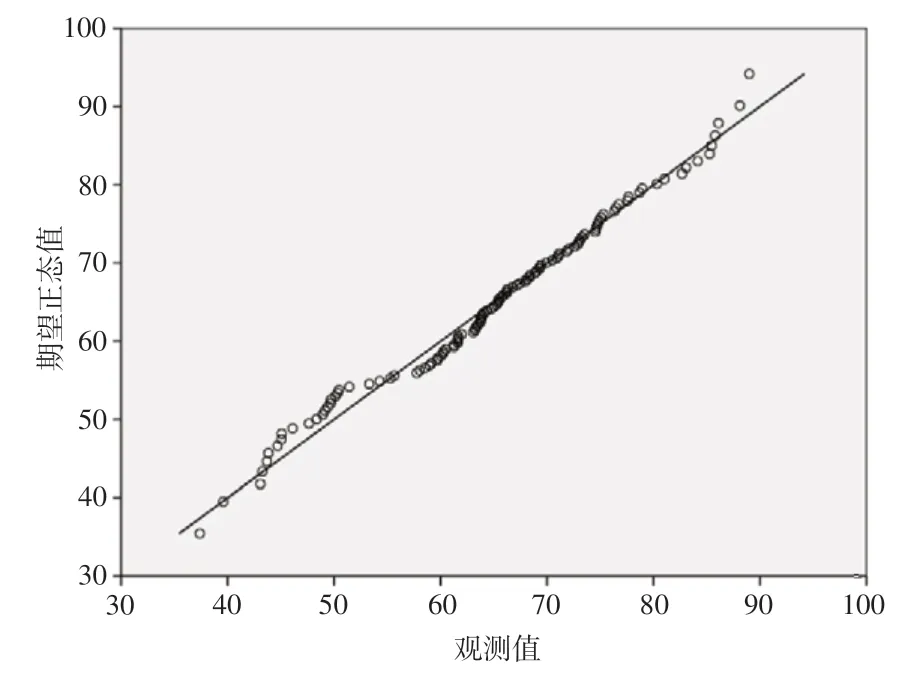
圖8 內側車道車速分布正態擬合Q-Q圖
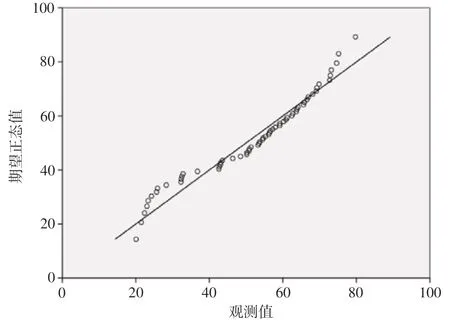
圖9 外側車道車速分布正態擬合Q-Q圖
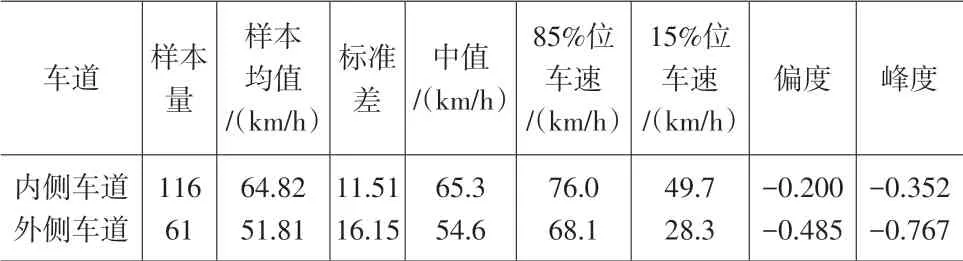
表3 車速的分布特征值
車頭時距是微觀交通分析中的一個重要參數,它直接反映了交通流狀態、駕駛員行為特性、路段或交叉口通行能力及服務水平,是計算通行能力、優化信號配時、構建車輛跟馳模型的最基本和最常用的參數[5]。本文利用快速路基本路段的視頻數據,把每一輛車通過某一固定點的時間記錄下來,獲得了內側車道上車輛的車頭時距,樣本量為128,其分布情況見圖10。
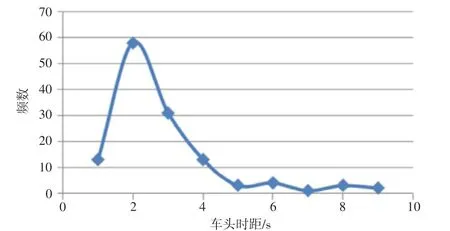
圖10 車頭時距分布實測數據
3 結語
微觀交通數據是研究交通系統的基礎和依據,對于通行能力的分析、智能交通系統的發展、異常交通狀態的識別、微觀交通流特性的研究以及微觀交通仿真技術的發展具有重要意義。本文應用攝影學的基本原理,闡述了通過視頻數據獲取車輛行駛軌跡的基本步驟,分析了圖像坐標轉換成實際坐標的原理,并利用實測數據提取了車輛的行駛軌跡,為研究微觀交通系統提供了數據處理方法。在此基礎上進一步得到了車速和車頭時距,并擬合了車速分布是近似服從正態分布。該方法的精度與攝像位置、天氣情況、提取圖像坐標的準確度等因素有關,從本文的分析結果來看該方法能對大部分數據進行有效的處理,精度能滿足要求,但工作量較大,如何提高圖像處理效率同時保證精度要求還需進一步探索。
[1] 張汝華,鄭黎黎,楊曉光,等.基于視頻技術的微觀交通流信息采集系統研究[J]. 交通與計算機,2004,22(6):33-36.
[2] 劉博航,裴玉龍,徐慧智.基于視頻處理的車道變換軌跡獲取技術[J]. 哈爾濱理工大學學報,2007,12(3):7-11.
[3] 金為銑.攝影測量學[M].武漢:武漢大學出版社,2001.
[4] 鐘連德,榮建,周榮貴,等.快速路交通流中車速特性研究[J].公路,2004,(12):158-162.
[5] 劉明君.基于混合交通流的信號交叉口機動車車頭時距研究[D].北京:北京交通大學,2010.