緊急狀況下車輛操作特性的仿真研究
2014-12-31 12:17:08夏如艇土居俊一
汽車工程學報 2014年1期
關鍵詞:駕駛員
夏如艇,土居俊一
(1.臺州學院 機械工程學院,浙江,臺州 318000;2.日本香川大學 工學部,日本,高松 761-0396)
近年來,隨著人們安全意識的提高,除了對車輛的運動性能提出了高要求之外,還迫切要求車輛具有良好的舒適性和預防安全性能。現代車輛的開發更多地把人-車作為一體進行設計和評價,基于人-車-環境系統分析的車輛運動性能設計和基于駕駛員認知﹑判斷和操作的駕駛支持系統的設計開發成為當今汽車發展的主流。駕駛行為是駕駛員依據人-車-環境系統中的各種視覺信息作出快速認知﹑準確判斷和穩定操作的過程,車輛直行、轉彎和停車等基本運動性能與駕駛員的視覺反應能力和駕駛操作能力緊密相關[1-5]。當行駛遇到緊急狀況時,如前方障礙物突現或彎道急轉事件出現,若車輛運動性能低下或駕駛操作不當,將可能造成人車沖突甚至交通事故。前方障礙物突現或急轉彎路面摩擦因數降低等情形下,駕駛員通常會依個人駕駛習慣進行轉向、制動或二者組合的回避操作[6-8]。為了科學評價交通安全及車輛運動性能,進一步提高車輛預防安全裝置性能,詳細闡明緊急狀況下的駕駛操作特性顯得尤為重要。本文通過對駕駛時各種交通狀況的調查分析,根據人﹑車輛和環境三要素,相對應地把駕駛員操作﹑車輛運動和交通場景構成駕駛模擬試驗系統的基本要素,設計了前方障礙物突現和急轉彎路面摩擦因數下降兩種緊急交通狀況。采用一種新型的駕駛模擬裝置,研究駕駛員在這兩種緊急狀況下的回避操作行為特性,并對試驗數據進行科學解析。對于分析交通事故和制定交通安全策略以及對車輛回避性能的評價提供指導,并為緊急回避轉向操作支持系統技術的開發提供了試驗依據。
1 直道行駛緊急避障操作
1.1 試驗方法
1.1.1 被試者:年輕組和年長組。
年輕組25~35歲,教師17名(其中女性7名),本科生9名(其中女性2名),共26名,駕齡均大于2年。年長組50~60歲,教師18名(其中女性6名),后勤、保衛及機關管理職員(即非教師人員)8名(其中女性3名),共26名,駕齡均大于4年。所有被試者均有正常視力或正常校正視力,且均取得駕駛執照。
1.1.2 試驗裝置
圖1表示駕駛模擬裝置(TRDS-Ⅱ型)。模擬裝置包括駕駛座艙﹑道路場景投影﹑平行軌道3部分,由橫向平移和傾斜轉動2個自由度運動構成。駕駛座艙可沿著平行軌道橫向平移運動,座艙下有一根回轉軸,垂直于軌道,可繞軸回轉,最大回轉角度±15°。座艙后上方安置一個投影儀將交通場景投影到前方的屏幕上。車輛及駕駛環境和行駛任務等試驗參數,主要包括車輛類型﹑行駛速度﹑直線路段行駛﹑彎道路段行駛﹑彎道曲率半徑和障礙物突現位置及駕駛時間等。圖2是直道行駛時的投影場景之一,投影屏幕設置在被試者前方2.5 m處。圖3是模擬裝置系統控制界面。車輛類型設置﹑試驗參數選定和場景投影輸出均由軟件控制。
1.1.3 試驗設計
車輛類型:A型車,轉向共振頻率1.0 Hz;
B型車,轉向共振頻率1.5 Hz
行駛速度:60 km/h (16.7 m/s);
100 km/h (27.8 m/s)
行駛路程:全程10 km(前半程和后半程各5 km)
單側路寬:3.5 m
如圖4所示,被試者首先進行預備駕駛任務5 km(圖中左側前半程),路側的邊墻無障礙物突現,其目的是讓被試者習慣了沒有障礙物突現的駕駛任務,而從后半段開始呈現障礙物突現,以凸顯緊急狀況,不使被試者對障礙物突現產生預測。然后從后半段開始進行共10 km的駕駛任務,行駛途中的路側有障礙物突現,每半程共有6次障礙物突現情景。要求被試者在10 km行駛任務中進行12次緊急避障操作任務,且每個被試者均要求進行A型和B型兩種車型及兩種車速的試驗。試驗中,被試者成功避障后,繼續駕駛前行,再進行下一次避障操作。若避障失敗,則車輛停止,重啟發動機,繼續前行。每種車型各試驗10 km。圖5表明了障礙物突現時的車輛避障狀況。
1.1.4 試驗程序
預先設定交通環境及行駛任務等參數。試驗過程是:被試者駕駛操作→伴隨操作的車輛狀態變化→伴隨車輛運動的場景變化→伴隨場景變化的各種駕駛操作。行駛道路是由直道和彎道組成的雙向對開普通路面,并沿著一側駕駛。被試者端坐在駕駛座艙內,手握轉向盤并注視屏幕上的交通場景進行模擬駕駛。根據場景出現的緊急狀況,迅速反應并快速做出判斷,當路側障礙物突現時,緊握轉向盤,并立即采取轉向或制動等緊急避障操作。此時,駕駛座艙的移動或轉動等試驗數據均由控制軟件自動記錄和處理。本試驗設定障礙物(汽車)從路側邊墻處突現,測試駕駛員的瞬間駕駛操作行為特性。
1.2 結果與討論
1.2.1 緊急避障操作動作的差異
根據控制軟件記錄的避障成功和失敗等數據,對兩組被試者及兩種車型的記錄數據進行統計分析。圖6和圖7表明了被試者在試驗車速60 km/h和100 km/h緊急避障時的駕駛操作動作狀況。
從圖6可知,當障礙物第1次出現時,低速狀況下80%被試者只采取制動避障操作(下稱制動避障),20%被試者采取轉向和制動組合避障操作(下稱復合避障)。在高速狀況下,采取復合避障的比例有所下降,采取制動避障的比例有所增加,兩組被試者之間有略微差異。但從圖7可知,在第2次及以后各次遇到障礙物突現時,兩組被試者對于障礙物突現采取復合避障的比例增加,尤其是年輕被試者采取復合避障的比例增加明顯,在低速狀況下所占比例為67.6%,制動避障占28.3%,轉向避障只占4.1%。而年長組的比例分別為復合避障占41.8%,制動避障占58.2%,而轉向避障為0。然而,比較低速和高速狀況下的緊急避障時,隨著車速提高,制動避障比例也明顯增加,表明了車速對駕駛員的緊急避障操作有明顯影響。
圖8和圖9分別表明了不同性別和不同職業被試者在兩種車速狀況下第2次及以后各次的緊急避障操作方式。圖8表明,兩種車速狀況下的緊急避障操作方式在性別上沒有明顯差異性,同樣,高速狀況下采取制動避障的比例明顯增加。圖9表明,在低速狀況下采取制動避障的比例存在一定的差異性,這可能是由于職業習慣和駕駛先驗知識的差異所致,但在高速狀況下制動避障的比例沒有明顯的差異。
從上述試驗結果可看出,當第1次遇到障礙物突現時,約80%的駕駛員只是采取制動避障的方式進行避障,在采取避障操作措施時年齡﹑性別和職業上的差異性不大,在高速狀況下緊急避障時駕駛員通常會采取制動避障的方式。當再次遇到障礙物突現時,采取轉向和制動復合操作的方式進行避障的比例明顯增加。這一結果潛在地提示,對駕駛員進行安全駕駛模擬訓練和教育有一定的作用。同時也意味著車輛的制動系統和轉向系統應具備良好的協調控制性能。比較第2次及以后各次的緊急避障操作狀況下各種被試者的試驗結果,只有低速狀況下的緊急避障在職業上略有差異,但各結果均表明,隨著車速的增加,制動避障的比例也明顯增加。說明了在高速行駛緊急避障狀況下,導致追尾或碰撞事故的可能性將增加。
1.2.2 緊急避障操作反應時間的差異
表1結果表明,當障礙物突現時,兩組被試者釋放油門踏板的平均反應時間無明顯差異,但踩下制動踏板的反應時間年輕組比年長組平均少約0.25 s。比較踩下制動踏板和轉動轉向盤的平均反應時間,可以看出,制動操作比轉向操作要早,且年輕組比年長組的轉向反應時間少。依據生理學和認知心理學理論,這一結果也說明了年輕駕駛員在生理活動能力和視覺功能及視覺注意等方面具有優勢。
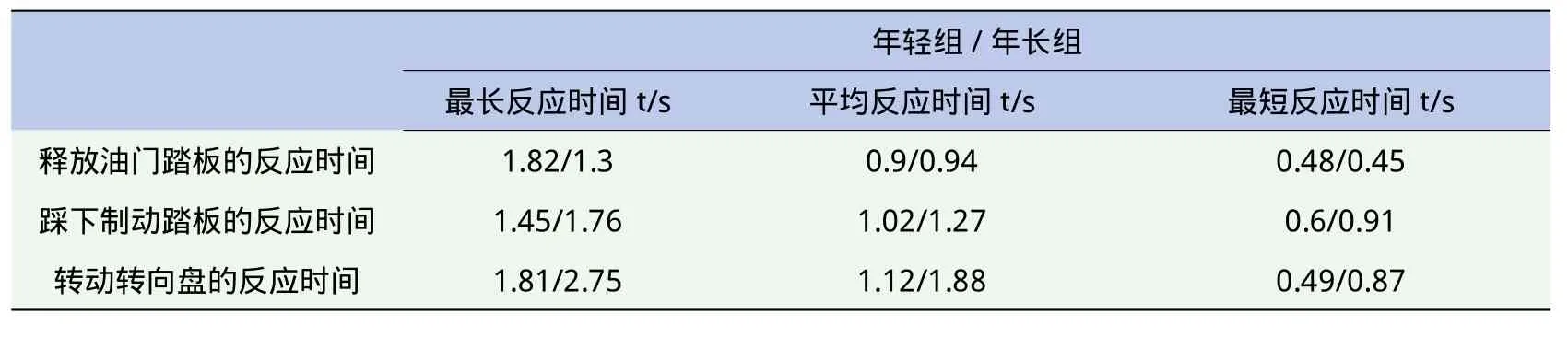
表1 兩組被試者避障操作時各動作的反應時間
1.2.3 不同車輛類型轉向避障操作動作的差異
圖10表明了A型車和B型車復合避障時的差異。從圖中可知,駕駛A型車時,復合避障占57.6%,制動避障占42.4%;而駕駛B型車時,復合避障占62.5%,制動避障占37.5%。即駕駛B型車比駕駛A型車的復合避障比例高,并且在試驗結束后,對被試者的詢問調查得知,回答“借助轉向方式進行復合避障時,B型車比A型車更易操作”的被試者占多數。這一結果說明,車輛轉向共振頻率對緊急避障有一定影響。
圖11表明了兩種車型在試驗車速100 km/h和60 km/h避障時脫離車道的狀況。比較圖11(a)和(b)可知,A型車避障脫離車道比B型車所占比例大。為了回避來自左側的突現障礙物,然后向右轉動轉向盤且脫離車道,在車速為100 km/h時,A型車和B型車的比例分別為28.6%和24.4%,差異不明顯。但當避障之后,車輛向左側脫離車道然后車輛又向右側脫離車道,所占比例分別為7.14%和2.4%,A型車比B型車的比例大。此外,車速對緊急避障有較大影響,在低速60 km/h時,脫離車道的比例明顯比100 km/h時要小,但低速避障時A型車與B型車的差異性不明顯。這一結果表明,與1.2.1中的結果分析一致,在高速行駛中當障礙物突現時車輛脫離車道發生事故的比例將可能增加。
圖12是A型車和B型車的轉向角與偏航率的波形圖(Lissajous圖)。從圖中可知,當緊急避障轉向時,轉向角度一樣,A型車比B型車偏航率大,也就是說,當避障轉動轉向盤時,A型車比B型車偏轉要延遲一些。這一結果是由于不同車輛的轉向性能的差異所致。
2 彎道行駛緊急回避操作
在彎道急轉時,后輪的路面摩擦因數降低,后輪側向力變小,偏航比例增大,車輛向內側偏轉,若不進行適當的轉向操作,將導致車輛失控。另外,前輪的路面摩擦因數降低時,前輪側向力變小,車輛向彎道外側滑移。
2.1 試驗方法
2.1.1 被試者
被試者為男性,25~50歲,30名,駕齡2~5年。所有被試者均有正常視力或正常校正視力,且均取得駕駛執照。
各組建村兩委班子必須要有公心,對合作社和社員要有高度負責的態度,切勿產生“重組建、輕經營”的現象。在經營管理上,在做好竹材一產的同時,充分發揮竹林規模集約優勢,節本生效、開源節流,以拓寬合作社經營渠道,增強合作社自我造血能力。
2.1.2 試驗裝置
與1.1.2中的裝置相同。
2.1.3 試驗設計
車輛類型為B型車,轉向共振頻率1.5 Hz。試驗行駛路線有5個彎道,全長約6 km,彎道與直線路段組合,如圖13所示。試驗車速60 km/h(16.7 m/s),最急彎道處轉彎半徑100 m時車輛橫向加速度約2.8 m/s2,車輛產生旋轉和偏移。
2.1.4 試驗程序
每個被試者進行模擬駕駛3圈。第1圈是為了適應駕駛模擬裝置的適應性試驗,不作數據記錄;第2圈使后輪路面摩擦因數降低;第3圈使前輪路面摩擦因數降低。前方彎道路面行駛場景如圖14所示。
2.2 結果與討論
2.2.1 后輪路面摩擦因數下降時的轉向回避模式
當車輛轉彎緊急回避時,后輪路面摩擦因數降低,駕駛員轉動轉向盤朝車輛偏轉增加的反方向進行轉向。若轉向回避操作不當,將使車輛旋轉甚至回避失敗,導致車輛脫離車道。30名被試者彎道回避操作共150次,統計數據得出,有116次發生車輛旋轉現象,占77%。分析表明,轉動轉向盤進行回避的模式有3種,如圖15所示,即模式A是車輛正常旋轉后朝反方向轉動轉向盤,再多次左右轉動轉向盤的模式;模式B是正常旋轉后朝反方向僅1次轉動轉向盤的操作模式;模式C是正常旋轉后朝反方向轉動轉向盤并保持轉向角不變的操作模式。模式A操作35次,所占比例30%;模式B操作48次,所占比例41%;模式C操作33次,所占比例29%。
采用不同的轉向回避模式會產生不同的回避結果。圖16表示了用3種不同轉向模式成功回避急彎并保持車輛不脫離行駛車道的比例。從圖中可知,采用模式A轉向方式的回避成功率最高,模式B的回避成功率最低。
2.2.2 前輪路面摩擦因數下降時的轉向回避模式
當前輪路面摩擦因數降低,駕駛員同樣需要轉動轉向盤,其轉動方向是朝轉彎內側,以保持車輛在行駛車道內。與后輪路面摩擦因數下降時的狀況相比較,統計數據得出,駕駛員同樣也會采取上述3種模式進行轉向回避操作。分析表明,當采取模式A回避操作時,回避成功的比例要高,所占比例為88%。
3 結論
采用一種新型的駕駛模擬裝置研究了緊急狀況下駕駛避障的操作方式和反應時間及彎道行駛時的轉向回避模式。探討了不同年齡﹑性別和職業的駕駛員緊急避障操作方式的差異,重點研究了車輛轉向性能和路面狀況對緊急避障操作方式和反應時間的影響。對于分析交通事故和制定交通安全策略以及對車輛回避性能的評價可提供借鑒,并且可為緊急回避轉向操作支持系統的技術開發與設計提供試驗依據。
(1)當第1次遇到障礙物突現時,80%的駕駛員只是采取制動避障方式進行避障。從障礙物突現到踩下制動踏板的反應時間年輕駕駛員約為1 s,比年長駕駛員平均少約0.25 s。
(2)車輛轉向共振頻率對轉向回避操作有影響,轉向共振頻率1.5 Hz的車輛比頻率為1.0 Hz的車輛具有更好的轉向回避性能。
(3)在彎道急轉時,為保持車輛姿勢穩定,當后輪路面摩擦因數降低應朝轉彎外側操縱轉向盤,而當前輪路面摩擦因數降低應朝轉彎內側操縱轉向盤。
References)
[1]IGUCHI H. Consideration for Creating Comfort of a Vehicle [J]. Denso Technical Review,2011,15(1):3-9.(Special issue,in Japanese)
[2]馬愛靜,毛建國,沈恒,等.駕駛員轉向行為建模的研究進展[J].汽車工程學報,2013,3(6):391-399.
Ma Aijing,Mao Jianguo,Shen Huan,et al. An Overview of Development of Driver Steering Behavior Models[J].Chinese Journal of Automotive Engineering,2013,3(6):391-399. (in Chinese)
[3]洪亮,楊亞聯,宋安興,等.人-車-路閉環的汽車穩定性控制模擬仿真試驗研究[J].汽車工程學報,2013,3(3):183-190.
Hong Liang,Yang Yalian,Song Anxing,et al. Study on Stability Strategy by Driver-Vehicle-Road-Loop Virtual Simulation Test[J].Chinese Journal of Automotive Engineering,2013,3(3):183-190. (in Chinese)
[4]DOI S. Advanced Driving Behavioral Analysis and Application for Future Active Safety[J]. Review of Automotive Engineering,2009,28(1):3-9.
[5]DOI S. Driving Support Systems Based on Human Factors[J].Denso Technical Review,2009,12(1):3-10.(in Japanese)
[6]DOI S,MIZUNO M,KUROYANAGI H,et al.Development of Driving Simulators and Their Application to Driving Maneuver Analysis [J]. R & D Review of Toyota CRDL,1998,33(1):3-11. (in Japanese)
[7]AMANO Y,HADA M,DOI S. A Model of Driver's Behavior in Ordinary and Emergent Situations [J].R&D Review of Toyota CRDL,1998,33(1):23-30. (in Japanese)
[8]DOI S,NAGIRI S,AMANO Y. Analysis of Active Safety Performances of Automobile Based on Driving Maneuvers in Emergent Situations[J]. R & D Review of Toyota CRDL,1998,33(1):31-38. (in Japanese)
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50
