光伏發電跟蹤支架陰影數學模型研究
2015-01-01 03:00:50特變電工新疆新能源股份有限公司何銀濤張梅黃華
太陽能 2015年3期
關鍵詞:支架
特變電工新疆新能源股份有限公司 ■ 何銀濤 張梅 黃華
0 引言
陰影遮擋是影響光伏發電的主要因素之一,因此,GB 50797-2012《光伏發電站設計規范》要求[1],光伏方陣間距設置要保證在全年每天9:00~15:00(當地真太陽時)時段內相鄰支架不互相遮擋。光伏發電跟蹤支架相比于固定式支架,發電量有明顯提高[2],但其陰影變化情況更加復雜。目前,針對跟蹤支架的控制系統精度和效率方面的研究較多[3,4],對于跟蹤支架運行過程中陰影的變化研究較少,而這一研究對于科學合理地設置相鄰跟蹤支架排布間距有重要意義。
本文根據特變電工哈密863實驗電站中3種常用跟蹤支架的運動規律,建立跟蹤支架陰影數學模型,從而為科學合理地確定相鄰跟蹤支架排布間距、高效利用土地資源提供理論依據。
1 建立跟蹤支架數學模型
根據跟蹤支架運動規律,建立適當的坐標系,并分別給出組串平面4個角點在運動范圍內的軌跡方程,進而得到跟蹤支架位置的數學模型。
1.1 平單軸跟蹤支架
圖1為平單軸跟蹤支架的俯視圖和左視圖。建立如圖1b所示坐標系o-xyz,其中,z軸垂直于xoy平面。平單軸跟蹤支架轉動軸與水平面平行,南北向布置,東西向轉動,ox指向正西方向,oz指向正北方向;A1-D1和A2-D2為AD轉動范圍內的兩個任意位置,θ為跟蹤轉角;o點離地面的距離為H,L為組串長度,2R為組串寬度。
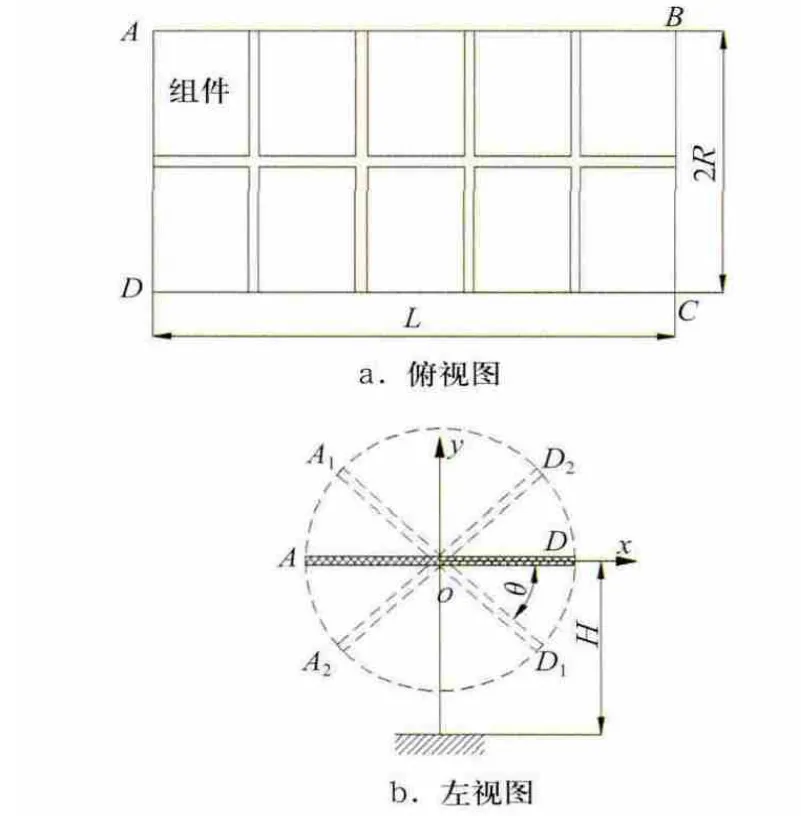
圖1 平單軸跟蹤支架結構簡圖
根據平單軸轉動規律,D點軌跡可表示為:

A、B、C 3點的坐標和D點關系式為:
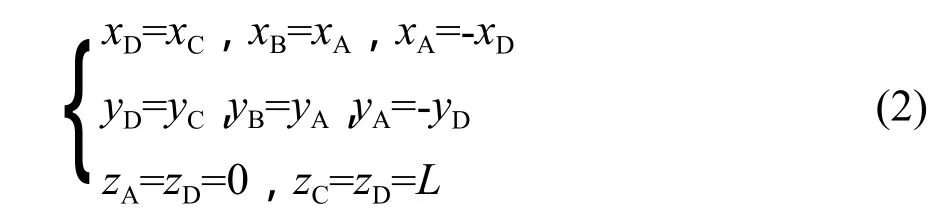
根據以上關系式可求得A、B、C、D 4點在坐標系o-xyz中的坐標,即得到平單軸位置數學模型。
1.2 斜單軸跟蹤支架

圖2 斜單軸跟蹤支架結構簡圖
圖2為斜單軸跟蹤支架的前視圖,組串平面與水平面垂直。建立如圖2所示坐標系o-x1y1z1,x1軸垂直于y1oz1平面。斜單軸跟蹤支架轉動軸與水平面夾角α,且轉動軸南北向布置,東西向轉動;oz1沿轉動軸方向,oy1軸沿AD邊指向上方;轉動軸低端離地面的距離為H1,高端離地面高度為H2;L為組串長度,2R為組串寬度。
根據布爾莎-沃爾夫轉換模型[5],對坐標系o-x1y1z1進行一次坐標變換,即繞y1軸逆時針旋轉角度α,得到坐標系o-xyz,變換關系用矩陣形式表示為:

變換后得到的坐標系o-xyz與圖1b中平單軸的坐標系一致。則在坐標系o-xyz中,D點軌跡表示為:
A、B、C 3點的坐標和D點關系式為:

再根據式(3)變換關系就可求得A、B、C、D在坐標系o-x1y1z1中坐標(xli, yli, zli),其中i=A、B、C、D,即得到斜單軸位置數學模型。
1.3 雙軸跟蹤支架
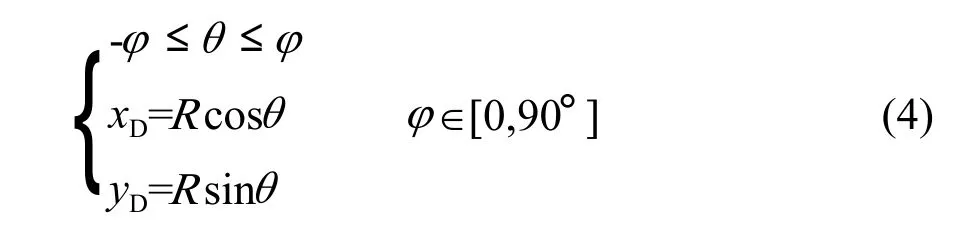
圖3為雙軸跟蹤支架的結構簡圖,組串平面ABCD為矩形。建立如圖3所示坐標系o-xyz,ox指向正東方向,oz指向正南方向;o點離地面的距離為H;L1為BC長度,L2為AB長度;雙軸跟蹤支架在跟蹤時間范圍內,組串表面時刻與太陽光線垂直。
圖3 雙軸跟蹤支架結構簡圖
雙軸支架繞y軸轉動跟蹤太陽方位角,繞x軸轉動跟蹤太陽高度角,組串平面ABCD初始位置在xoz平面內,BC平行于x軸,AB平行于z軸。設在跟蹤過程中,轉動一個位置便建立新的坐標系o-xiyizi,且BC平行于xi軸,AB平行于zi軸,則o-xiyizi可通過坐標系o-xyz坐標變換獲得。在坐標系o-xiyizi中,A、B、C、D坐標表示為:

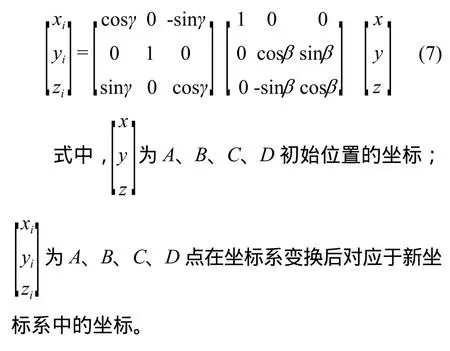
設某一時刻太陽高度角h,太陽方位角β,則雙軸轉動過程可表示為:先繞y軸轉動γ,再繞x軸轉動,β=90°-h。故根據布爾莎-沃爾夫轉換模型[5],坐標變換關系表示為:
2 陰影數學模型
遮擋物高度與其陰影長度的幾何關系表示如圖4所示(以A點為例,點A′為A點在地面的影子)。

圖4 遮擋物高度與其陰影長度的幾何關系圖
2.1 平單軸跟蹤支架
根據圖1b和圖4幾何關系,遮擋物高度表示為:HGi=yi+H,則陰影長度Li=HGicoth,陰影長度南北向分量LNSi=|Licosγ|,陰影長度東西向分量LEWi=|Licosγ|,其中,i=A、B、C、D。則A、B、C、D4 點在地面的影子 A′、B′、C′、D′的坐標表達式為:

式中,i=A、B、C、D。
2.2 斜單軸跟蹤支架
參照圖4幾何關系,遮擋物高度表示為:HGk=y1k+H1,k=A、D;HGj=y1j+H2,j=B、C。陰影長度Li=HGicoth,陰影長度南北向分量LNSi=|Licosγ|,陰影長度東西向分量LEWi=|Lisinγ|,其中,i=A、B、C、D。則A、B、C、D 4點在地面的陰影 A′、B′、C′、D′的坐標表達式為:
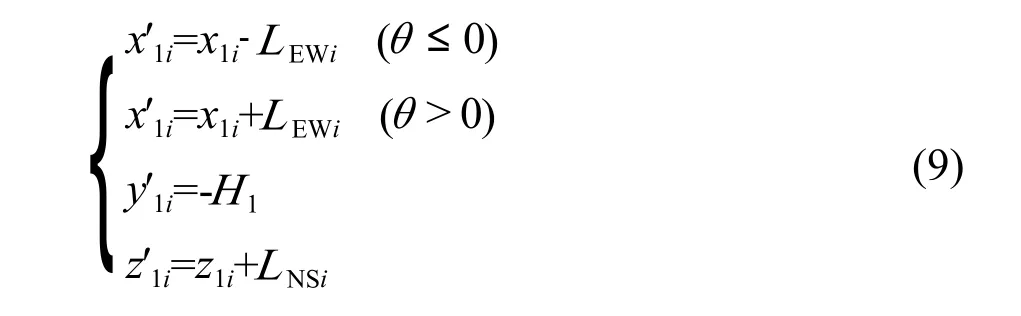
式中,i=A、B、C、D。
2.3 雙軸跟蹤支架
參照圖4幾何關系,遮擋物高度表示為:HGi=yi+H,陰影長度Li=HGicoth,陰影長度南北向分量LNSi=|Licosγ|,陰影長度東西向分量LEWi=|Lisinγ|,其中,i=A、B、C、D。則A、B、C、D 4 點在地面的陰影 A′、B′、C′、D′的坐標表達式為:

式中,i=A、B、C、D
3 計算示例
以陰影變化情況最為復雜的斜單軸為例,對光伏發電跟蹤支架陰影數學模型的計算過程進行說明。
如圖2所示,已知L=10.1 m,R=1.8 m,H1=1.3 m,H2=3.9 m,α=15°;方位角跟蹤范圍為-45°≤θ≤45°;建設地為哈密地區,緯度 42.6°,經度94.9°;并假設地面平整。
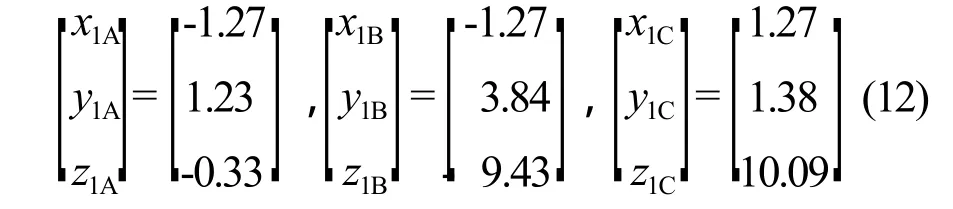
冬至日真太陽時9:00,斜單軸跟蹤角度θ=-45°,根據1.2節內容及式(3)可得D點在坐標系o-x1y1z1中坐標為:

同理可得:
根據太陽角計算公式[6],建設地(緯度42.6°,經度94.9°)冬至日真太陽時9:00,太陽高度角h=12°,方位角γ=41.56°,再根據2.2節內容,可得:
HGA=1.23+1.3=2.53 m,LA=2.53 cot12°=11.9 m,LNSA=|11.9cos41.56°|=8.9 m,LEWA=|11.9sin41.56°|=7.9 m。則根據式(9),A點在地面陰影A′ 坐標為:

同理可得:

通過以上計算過程,可得到斜單軸組串在冬至日真太陽時早9:00的姿態(式(11)和式(12))和對應的陰影情況(式(13)和式(14))。

圖5 斜單軸跟蹤支架排布及陰影俯視圖
相鄰斜單軸組串的陰影形狀相同,只要保證相鄰斜單軸組串在地面陰影不重疊,便不會產生遮擋現象,故由幾何關系可得鄰近4個斜單軸組串排布狀況及陰影狀況如圖5所示。藍色框表示斜單軸組串的俯視圖,黑色框表示對應的陰影;設置的東西向間距為7 m,南北向間距18.5 m。
以上是斜單軸的計算示例。平單軸、雙軸計算過程與之類似。
4 結束語
本文建立了3種常用光伏跟蹤支架的陰影數學模型,并以斜單軸跟蹤支架的陰影數學模型為例,對此陰影數學模型的計算過程進行說明,得到了斜單軸在冬至日真太陽時早9:00的位置坐標和陰影坐標;最后,根據幾何關系,得到了合理的斜單軸方陣布置間距,保證整個跟蹤范圍內既不產生相互遮擋現象,又能充分利用土地。
因此,此陰影數學模型對設置光伏跟蹤支架排布的合理間距、優化跟蹤支架方陣占地面積有重要的指導意義。
[1] 中國電力企業聯合會. GB 50797-2012光伏發電站設計規范[M]. 北京: 中國計劃出版社, 2012.
[2] 張峰, 王垚, 陳正安, 等. 光伏電站跟蹤系統的技術分析和比較[A]. 中國電機工程學會清潔高效燃煤發電技術協作網2009年會論文集[C], 2009, 1-6.
[3] 張相明, 鄧瑋, 關煥新, 等. 光伏發電雙軸自動跟蹤控制系統的設計[J]. 東北電力技術, 2013, 3: 48-50
[4] 張鵬飛. 光伏發電自動跟蹤系統的設計[D]. 哈爾濱理工大學, 2009, 23-24
[5] 張宏. 布爾莎-沃爾夫轉換模型的幾何證明[J]. 測繪與空間地理信息, 2006, (2): 52-53.
[6] (西 )Antonio Luque, (美 )Steven Hegedus, 等 [著 ], 王文靜 ,李海玲, 周春蘭, 等[譯]. 光伏技術與工程手冊[M]. 北京: 機械工業出版社, 2011.
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
