基于三維仿真的飛行姿態與航跡監控軟件的設計
2015-01-04 08:51:14霍朝暉劉成玉覃楊森
電子設計工程 2015年12期
祁 春,霍朝暉,劉成玉,覃楊森
(中國飛行試驗研究院 陜西 西安 710089)
飛行試驗是飛機及相關航空產品設計定型的重要階段,具有技術綜合性強、風險性大、耗資大、周期長等特點[1]。隨著近年來新機和改型機大量涌現,加之風險科目、極限科目不斷增加,飛行試驗對安全、質量和科目架次有效性的要求更加苛刻和嚴格,而地面遙測實時監控系統在這些方面起著至關重要的作用。傳統的實時監控軟件多采用數據列表、數據表格和二維曲線圖等形式反映飛機的過程和狀態,直觀性差、難以準確把握參數間的相關性和發掘數據的本質特征[2-3]。隨著計算機技術、圖像技術、多媒體等技術的發展,可視化三維仿真在飛行試驗中得到青睞,它利用人的視覺特性,將飛行數據以圖像形式展示,真實感和視覺感強[4],利于對飛行整體狀態的把握,而且試飛結束后還可利用回放形式逼真再現飛行全過程,可作為事后分析的重要依據。文中詳細介紹了基于三維仿真的飛行姿態和航跡監控軟件的總體設計架構、主要模塊的功能和設計方法。實際應用表明:三維模型驅動和場景設計滿足型號試飛要求,人機接口友好,畫面運行穩定、流暢,在保障試飛任務的高質量完成和安全上發揮著重要作用。
1 總體結構設計
飛行姿態與航跡監控軟件實時接收遙測數據,利用數據驅動目標三維模型各部件的動作以及在三維場景中運動,反映出試驗機的姿態、位置和航跡等信息。根據試驗任務需求,軟件的總體設計結構如圖1所示。整個軟件在結構上主要由數據源管理、試驗任務管理、三維姿態顯示和地圖航跡顯示等部分組成。
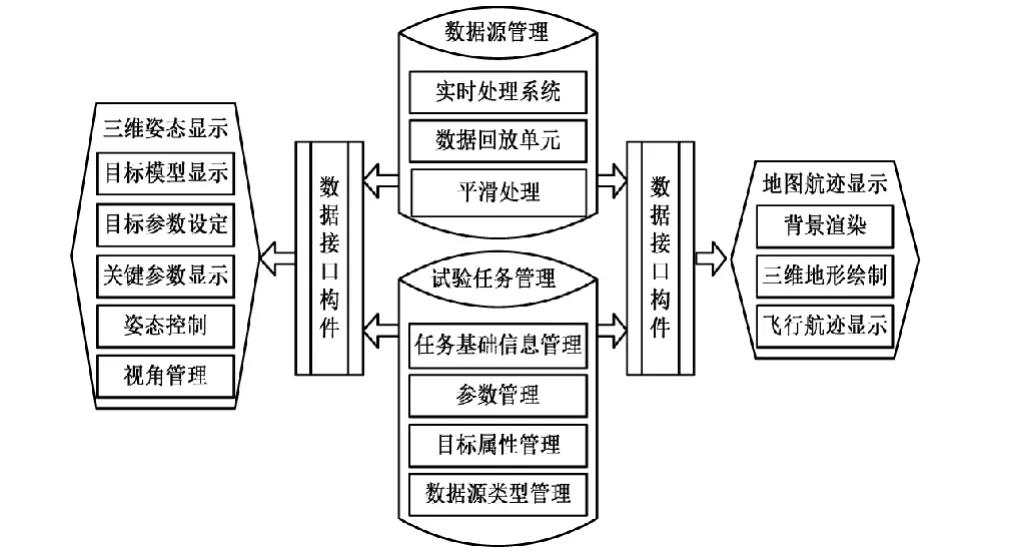
圖1 軟件總體結構Fig.1 Overall structure of the software
2 模塊設計
2.1 數據源管理
數據源管理主要對實時數據處理系統(以下簡稱實時系統)的網絡通信、數據平滑處理和試驗任務結束后的數據回放進行管理。模塊直接從系統任務中提取目標飛機的試驗參數和運行所需的相關信息,自動與實時系統建立網絡連接。同時,對提取的試驗參數按照規定的格式進行字符串組合,以TCP方式發送至實時系統,實時系統依據參數字符串對網絡數據進行解析,提取參數對應的數據,轉換為工程數據后返回給數據接口構件。由于遙測數據在傳輸鏈路上會因干擾產生跳點數據,將直接影響到三維飛機模型的連續運行和地圖航跡線的光滑度。所以,對接收到的工程數據應作平滑濾波處理,消除或者減弱跳點數據對三維運行效果的影響,而數據平滑處理的原則是既要消除數據中的干擾成分又要保持原有數據的變化特性。基于這一點,本設計中采用了五點三次平滑法,利用多項式最小二乘法逼近對工程數據插值濾波和平滑處理,數據源管理模塊處理流程如圖2所示。

圖2 數據源管理模塊處理流程Fig.2 Processing flow of data source management module
另外,數據源管理模塊設計有回放功能,通過加載試驗目標參數信息和試驗數據,設置回放動作,包括回放起止時間、回放速率等來再現歷史飛行過程,可作為飛行演示或者為故障排查提供依據。
2.2 試驗任務管理
試驗任務管理包括任務基礎信息管理、參數管理、目標屬性管理和數據源類型管理。任務基礎信息管理主要是設置試驗任務的名稱、飛機代碼、試驗時間、任務描述等相關信息,由于數據源管理從任務系統中提取試驗參數是依據任務名稱進行的,所以要求任務名稱具有唯一性。
參數管理分為試驗參數管理、目標驅動參數管理和虛擬平顯參數管理等模塊。試驗參數管理模塊對XML格式的試驗參數文件進行解析,讀取試驗目標的參數信息,加載到內存后進行統一管理,并按照飛機編號完成試驗參數的分組,具備參數檢索接口;驅動參數管理模塊完成模型驅動參數和試驗參數的一對一綁定,為了驅動模型運行,綁定的試驗參數必須包含經度、緯度、高度、俯仰角、橫滾角和航向角等。同時,該模塊可以將試驗參數的綁定信息存儲至任務文件當中,便于后續的直接調用;虛擬平顯參數管理模塊從平顯配置文件中讀取各顯示元素的參數名稱,并與對應的試驗參數進行綁定,用于驅動畫面各圖形元素的運動。
目標屬性管理主要根據不同的試驗任務要求選擇對應的試驗目標,由于各試驗目標自身屬性不同,需要外部提供相應的信息驅動來保證目標屬性的正常運行,所以目標屬性也需要綁定相應的試驗參數信息。
數據源類型管理主要負責試驗目標與實時系統接口進行綁定,以實現從對應的實時系統通道中獲取試驗數據以驅動目標的運行。
2.3 三維姿態顯示
三維姿態顯示是軟件的核心部分。主要是利用試飛試驗數據實時驅動模型各部件的動作及在三維場景中的運行,反映出目標飛機在三維空間中的位置、姿態和系統狀態信息。設計上分為兩個階段:三維建模與場景驅動。模型的構建要求和真實試驗機的外觀和尺寸保持一致,建模采用了Multigen公司的Creator軟件,Creator是一款高效的實時三維建模工具軟件,擁有針對實時應用優化的數據格式,整合了大量有效的工具來建立“所見即所得”的層級可視化數據庫環境,能夠構建高度逼真、高度優化的三維模型[5-6]。而驅動場景則采用了真實的數字高程數據和衛星影像數據,逼真的顯示了試驗場地和周邊的主要建筑物。在利用試驗數據驅動模型各部件動作之前,對有關位置和姿態的試驗數據均進行了濾波和平滑處理,以確保三維模型連續、穩定運行。另外,模型的驅動須有目標編號、經度、緯度、高度、速度、俯仰角、橫滾角和航向角等試驗數據。圖3為某民機模型的三維態勢顯示效果圖。
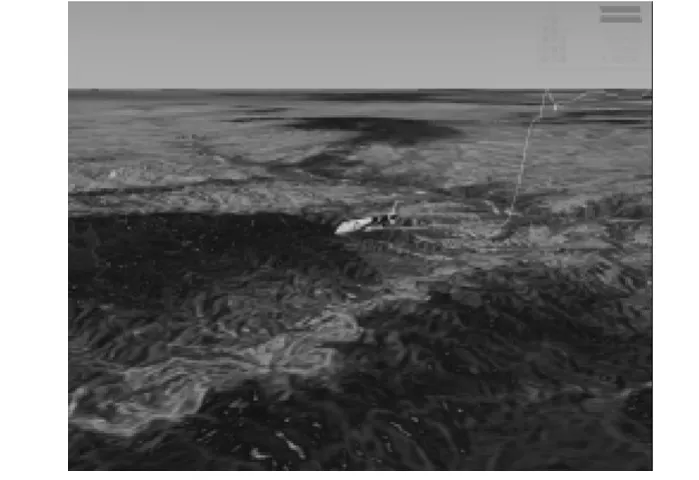
圖3 某民機模型的三維態勢顯示效果圖Fig.3 3D situation operation effect of some civil aircraft module
三維姿態顯示模塊可以根據任務需求選擇空間觀察模式,包括態勢觀察模式、跟隨觀察模式和平顯觀察模式。其中,態勢觀察模式提供一種三維場景的全局展現,可以方便觀察飛機歷史航跡線,多機及目標間的相對位置關系,以及飛機當前的位置和姿態,有利于從整體上的把控;跟隨觀察模式是一種近距離觀察模式,可在較近距離觀察目標飛機的姿態,提供多視角的跟隨觀察,如眩窗視角、中心點視角、尾隨視角、俯視視角等;平顯觀察模式將切換至虛擬平顯界面,并驅動各元素的運行。圖形元素采用OpenGL進行繪制,并利用雙緩存技術實現平滑的動畫表現。圖4為切換至平顯觀察模式的效果圖。

圖4 平顯觀察模式的效果圖Fig.4 Operation effect of virtual HUD observing pattern
2.4 地圖航跡顯示
地圖航跡顯示是重要的輔助功能模塊。該模塊以二維電子地圖為背景,采用中國2000大地基準和高斯-克呂格投影進行地圖繪制,將1:100萬矢量地圖數據和1:25萬矢量地圖數據進行疊加融合處理。其中,1:100萬矢量地圖數據為全國背景地圖,1:25萬矢量地圖數據為試驗場地地圖。試驗場地采用30 m分辨率還原自然真彩色衛星圖片,而機場附近則采用1 m分辨率還原自然真彩色衛星圖片。
地圖中能夠實時顯示目標飛機的位置信息,當觀察的目標不在屏幕顯示范圍內時,可通過選擇觀察目標進行定位顯示,目標將自動定位到窗口的中心,特別是在多目標任務中,可以實現目標間的自由切換。同時,能夠實時顯示目標的飛行航跡,能夠通過航跡屬性接口控制航跡顯示的點數和顏色,并具有顯示和清除航跡的功能,以滿足試驗任務需求。為了更好的反映出飛機的狀態,在二維地圖上提供了標牌顯示控制,能夠實時顯示目標編號、時間、經度、緯度、海拔高度、速度和航向等參數信息,能夠隨目標同步移動。另外,設計有縮放(包括按比例縮放和無極縮放)、漫游、圖層控制和距離測量等輔助功能手段。圖5為地圖航跡整體到局部的縮放顯示效果。
3 結束語
隨著三維仿真技術的成熟應用,在飛行試驗領域也越來越得到青睞。飛行姿態與航跡監控軟件采用高效實時三維建模工具軟件Creator按照真實試驗機外觀和尺寸對目標飛機進行建模,結合真實的數字高程數據和衛星影像數據建立了逼真的驅動場景,多空間觀察模式使得可以從不同角度反映出飛機的當前狀態。而地圖航跡顯示模塊能夠實時顯示目標位置和航跡信息,對整體信息的把握具有很重要的輔助作用。同時,軟件的回放功能能夠逼真再現飛行全過程,可作為飛行演示和事后分析的一種重要手段。
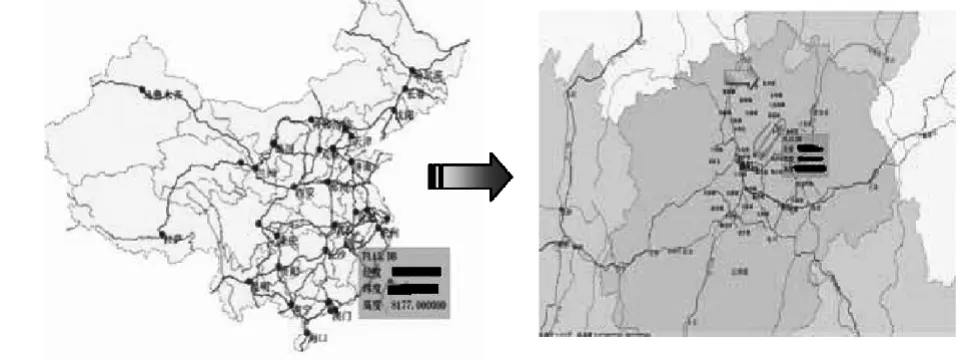
圖5 地圖航跡縮放顯示效果Fig.5 Zooming operation effect of electronic map
飛行姿態與航跡監控軟件采用了分層設計和功能模塊化設計思想,有效控制了各個分系統、功能組件間的耦合關系,便于軟件的維護和升級。該軟件的成功研制,利于從全局和多個角度掌握目標的姿態、位置和系統狀態信息,以準確作出試飛決策,在提高試飛效率和保障試飛安全方面發揮著重要作用。
[1]張建林.試飛監控系統及其應用[J].飛行試驗,2004,20(3):35-39.ZHANG Jian-lin.Test flight monitoring system and application[J].Flight Ttest,2004,20(3):35-39.
[2]王永,崔瑋,花遜蒙,等.直升機飛行控制三維動畫仿真平臺設計與實現[J].系統仿真學報,2009,21(20):6440-6443.WANG Yong,CUI Wei,HUA Xun-meng,et al.Design and implementation of helicopter flight control base on 3D animation simulation[J].Journal of System Simulation,2009,21(20):6440-6443.
[3]趙向領.基于三維場景的飛行回放仿真系統研究[J].計算機工程與設計,2012(4):1518-1521.ZHAO Xiang-ling.Research of flight playback simulation system base on 3D scene[J].Computer Engineering and Design,2012(4):1518-1521.
[4]丁斌,祖家奎.基于虛擬現實的無人機三維可視化仿真[J].計算機測量與控制,2007,15(12):1769-1771.DING Bin,ZU Jia-kui.3D visualization simulation of UAV base on virtual reality[J].Computer Measurement and Control,2007,15(12):1769-1771.
[5]徐鶴.基于Multigen Creator/Vega Prime無人機三維視景仿真系統的設計與實現[D].南京:南京航空航天大學,2008.
[6]賀濤,謝軍,王文娟,等.基于Multigen的無人機任務飛行仿真系統[J].計算機工程,2010,36(1):248-250.HE Tao,XIE Jun,WANG Wen-juan,et al.Flight simulation system of UAV task base on multigen[J].Computer Engineering,2010,36(1):248-250.