適應多型毫米波雷達數據的通用讀取程序設計
2015-01-05 05:54:30王會,王旭,2
成都信息工程大學學報 2015年2期
關鍵詞:自動識別
王 會,王 旭,2
(1.成都信息工程學院電子工程學院,四川成都610225;2.中國氣象局大氣探測重點開放實驗室,四川成都610225)
0 引言
與現有的厘米波氣象雷達相比,毫米波雷達波長更短,與云中粒子的相互作用更強,對尺度小的云粒子而言,獲得后向散射更強,因而更適合非降水與弱降水云的遙感觀測[1]。毫米波雷達的發(fā)展最早開始于美國空軍,在20世紀50年代至70年代初著手開始研發(fā)的8.6 mm波長(Ka波段)毫米波測云雷達,其型號是TPQ-11[2]。1964年,Harper[3]利用 AN/7PQ-11 型號的毫米波雷達進行云的垂直對空探測實驗,在70年代早期[4],因雷達磁控管出錯頻繁,該型號雷達停止運行,到70年代末期Hobbs等開發(fā)了新的元件使AN/7PQ-11恢復正常工作[5]。其后隨著技術的進步,又相繼發(fā)展了具有多普勒和雙極化功能的Ka云雷達。中國毫米波測云雷達起步比較晚,對毫米波測云雷達研究還較少,首次用毫米波雷達做氣象探測是在1980年,由中國科學院大氣物理研究所同安徽井崗山機械廠協作研制成的雙波長雷達(波長為3.2 cm和8.2 mm)[6]。2006年空軍第七研究所和安徽四創(chuàng)電子有限公司協作研制成了一部毫米波測云雷達(波長8.6 mm),主要用于監(jiān)測云內的積水情況以利于飛機的安全飛行[7]。2007年中國氣象科學研究院與中國航天研究二院第二十三所聯合研發(fā)了具有多普勒和極化功能的測云雷達(波長為8.6 mm)[8]。現在最常用的個毫米波雷達的波段為35 GHZ(8 mm)和95 GHZ(3 mm)。
云是研究大氣系統的重要要素,一方面因將大氣頂層的太陽短波輻射反射回大氣中而對地氣系統起到了冷卻作用,另一方面要吸收來自地表和云之間的大氣長波輻射,又對地氣系統起到了增溫作用。地球表面以上的天空大約50%以上被云所遮蓋。所以對云的研究非常必要,云不僅對自然降水起到了很大的作用,更是人工降水的重要要素[9]。要根據毫米波雷達分析云的結構(如云高、云厚、云內液態(tài)含水量、粒子有效直徑等重要參數)就必須先清楚毫米波雷達探測到的數據文件格式,以便于準確地提取原始數據。2013年,楚志剛等[10]、顧松山等[11]分析了新一代天氣雷達格式,利用各個天氣雷達基數據各自的特征,不同格式之間存在的明顯差異,給每一種格式的基數據定義了一組判據,從而實現新一代天氣雷達基數據文件格式的自動識別。目前國內已有的不同型號的毫米波雷達較少,文中主要以3種較為常用的毫米波雷達為基礎進行分析研究,總結出這3種型號的雷達基數據判別方法,并用大量的基數據進行驗證,結果表明文中給出的分析方法有效可行。
與常用的天氣雷達相比較,毫米波云雷達波長更短,其對于云這類小粒子更加的敏感且毫米波雷達空間和時間分辨率高,能夠獲得更加精細的云結構[12]。對于毫米波雷達的系統以及對云的探測能力目前已經有很多的相關研究。2011年王斌等[13]利用武漢暴雨所的SCRMP-03型號的毫米波雷達與雙偏振雷達置于同一個觀測地點,利用觀測得到的資料對云雷達的探測能力進行分析,得出云雷達各種探測量對于反映不同類型云的宏觀和微觀特征中的表現以及可能用途。2014年謝蕾等[14]利用毫米波雷達與雨滴譜儀聯合觀測,得出毫米波雷達對于探測低層弱降水云得到的徑向速度、譜寬、歸一化功率譜具有一定的準確性。2007年KolliAs等[15]概述毫米波雷達從最早開始到現在在云和降水方面的前沿研究,提出云雷達在探測云方面有其獨特的優(yōu)勢,且云雷達和其他探測設備(如激光雷達)的結合探測、云雷達的可移植性使其適合放在移動平臺上。
1 3種型號毫米波雷達簡介
SCRMP-03型毫米波雷達由安徽四創(chuàng)電子股份有限公司生產。主要用于非降水云和弱降水云的探測,可以實時獲取探測范圍內云的分布、位置、強度、速度及譜寬等相關信息。通過對云探測到的數據信息,為氣象研究提供云底高、云厚、云的分布等結構資料以及云的狀態(tài)屬性等以及云相態(tài)、云滴譜和云中氣流分布等氣象資料。還可以通過對探測數據反演研究云的微物理結構。
GLC-64型毫米波測云雷達是由國睿科技公司生產。主要用于觀測非降水云系和弱降水云的三維動態(tài)結構,識別云內相態(tài)、水成物含量、云內氣流分布,進而推斷云內微物理結構參數。系統采用單發(fā)雙收體制,具有固定式和移動式兩種工作平臺,其中移動式又具有方艙移動式、依維柯車載移動式兩種結構方式。
成都784廠雷達研究所與成都遠望科技有限責任公司聯合研制生產的毫米波測云雷達,目前在成都信息工程學院運行的毫米波雷達就是其成功案例。T探測并保存了較多的基數據,可用于驗證文中研究的識別方法。表1列出這3種不同型號的毫米波雷達性能參數對比。
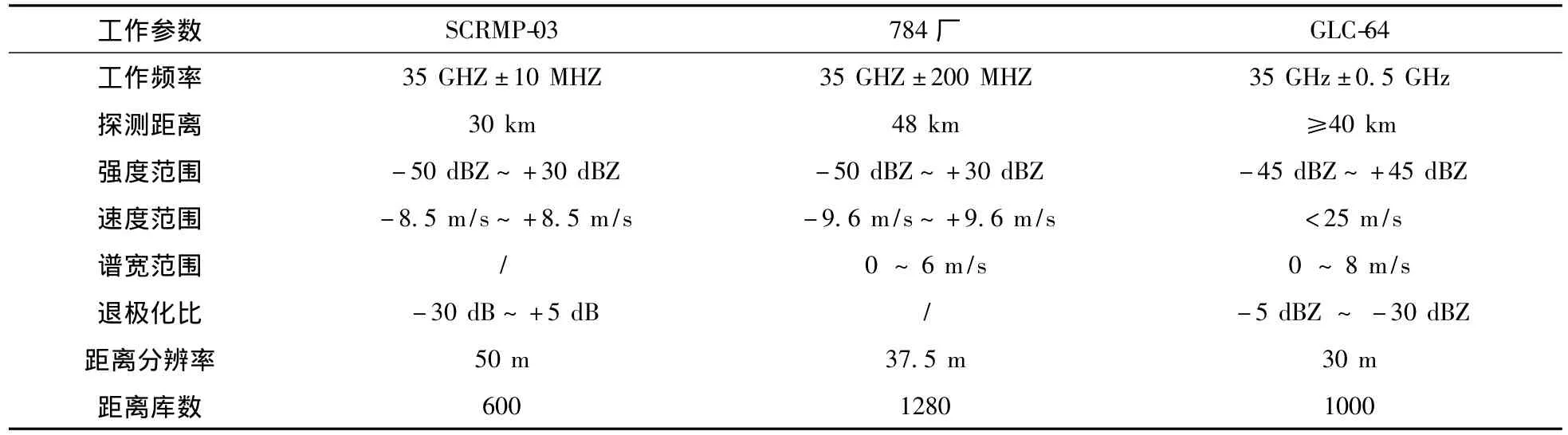
表1 3種型號毫米波云雷達參數對比
2 3種型號毫米波雷達基數據文件格式分析
2.1 四創(chuàng)公司SCRMP-03型毫米波雷達
SCRMP-03毫米波測云雷達(工作頻率35 GHZ),其原始數據文件的文件頭分為4個結構體組成:站址情況、性能參數、觀測參數、其他信息如圖1所示。數據文件存儲格式如圖2所示,原始數據文件由文件標識(12字節(jié))、文件頭(2048字節(jié))和數據紀錄塊組成。文件頭記載雷達站名、站址、雷達型號、主要參數、觀測時間、掃描類型、工作狀況等內容。數據記錄以極坐標方式排列。
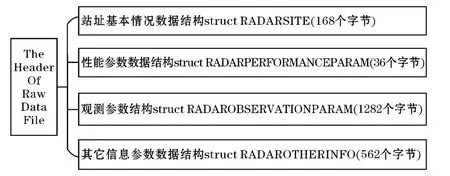
圖1 SCMRP-03毫米波云雷達基數據文件頭組成結構
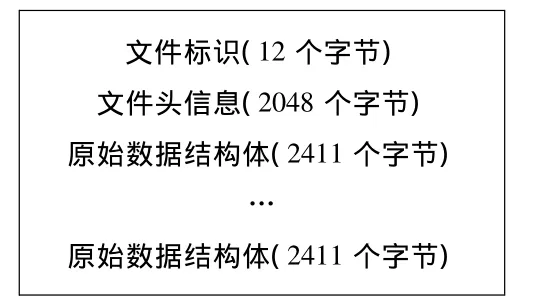
圖2 SCMRP-03毫米波雷達基數據文件存儲格式
2.2 國睿公司GLC-64型毫米波測云雷達
GLC-64毫米波測云雷達的數據格式和SCRMP-03毫米波測云雷達的格式十分類似,數據文件分3部分組成:文件標識(12個字節(jié))、文件頭信息(2048個字節(jié))、雷達原始數據塊。文件頭由4個結構體組成:
(1)站址基本情況(共168個字節(jié));
(2)性能參數(共36個字節(jié));
(3)觀測參數(共1282個字節(jié)),其中包括一個層參數信息數據結構和3個變庫長數據結構;
(4)其他信息參數(共562個字節(jié))。
其原始數據文件中數據存放的順序和格式如圖3所示。
2.3 784廠毫米波測云雷達
成都784所產的35 GHZ毫米波云雷達的存儲格式如圖4所示,數據是由于N個基數據包組成的(N為正整數由掃描方式和工作參數決定)。每個基數據包由3個部分組成:基數據頭、雷達數據RVW、尾標記。掃描方式有3種:方位掃描、俯仰掃描、時間掃描。時間掃描方式是存放一天的數據,因而基數據包的個數由實際的工作參數決定。俯仰掃描保存的是從最高點到最低點或者從最低點到最高點的一個半程掃描的數據。方位掃描時,一個文件存放的是掃描一圈的數據,文件中包含N個徑向的數據。
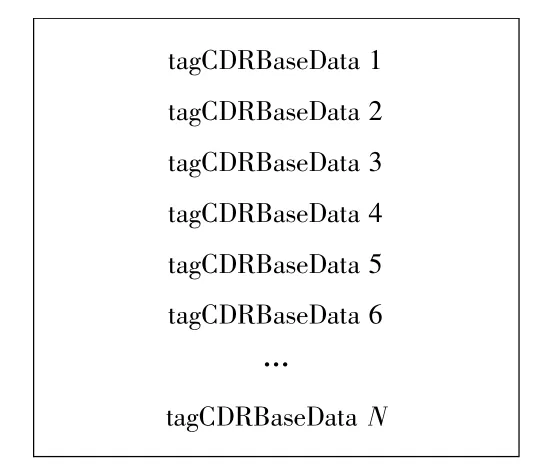
圖4 784毫米波雷達基數據存儲格式
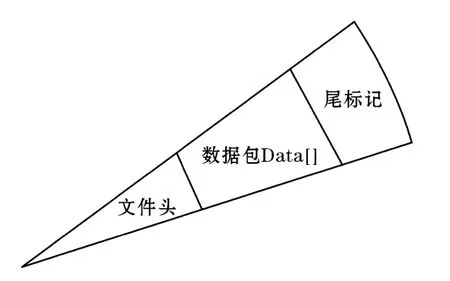
圖5 一個基數據包tagCDRBaseData結構圖
一個基數據包代表掃描一個徑向的數據。基數據包的定義如下:
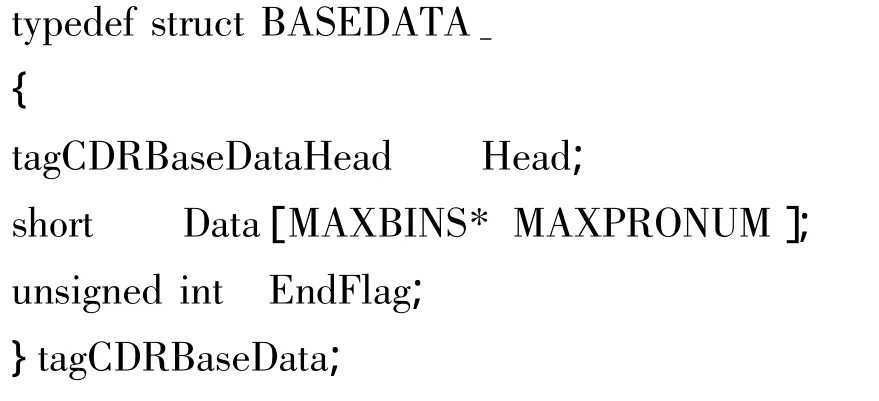
其中Data數組的大小為MAXBINS*MAXPRONUM,MAXBINS的大小定義為1280,MAXPRONUM 的大小為3。基數據頭Head里面存放了記錄數據的相關信息,如記錄數據開始與結束的時間、以及雷達的狀態(tài)參數。這些都可以作為分析數據格式的依據。Data[]數組里面存放了反射率、速度、譜寬3種數據。數據為16位有符號數。最后的是一個基數據包的尾標識,存放固定的信息,這也是識別的一個重要依據。一個基數據包tagCDRBaseData的結構如圖5所示,每個徑向的距離庫數為600(400個對應距離為30 km)。
3 基數據文件識別方法
文中介紹的3種毫米波測云雷達基數據文件格式有明顯的差異,如固定的參數信息,數據長度等變化的信息等。利用這些差異,為3種雷達基數據文件格式定義了5組判據,通過這些判據識別,如果一個數據文件屬于某種型號的毫米波雷達,那么此文件一定同時滿足這5個判據,否則不是這種型號雷達的基數據文件。
3.1 SCRMP-03基數據文件格式判別
(2)文件頭FileHeaderLength的值為2048,在文件的[8~11]字節(jié)處。
(3)雷達型號 RadarType的值為“SCRMP-03”,在文件的[112~131]字節(jié)處。
(4)觀測開始的時間在正確的范圍內(1999<Year<2050、1< Month<12、1< Day<31、0<Hour<23、0<Min< 59、0<Sec<59),依次存放在文件的[217~224]字節(jié)處,其中Year占兩個字節(jié),其余占一個字節(jié)。
(5)雷達掃描的徑向個數RecordNumber一定等于(FileLength-2060)/2411。
3.2 GLC-64基數據文件格式判別
(1)文件頭長度FileHeaderLength為2048個字節(jié),在文件的[0~3]字節(jié)處。
(2)文件標識和文件頭長度共為2060,原始數據的一個基數據包大小為8011個字節(jié),因此文件必滿足(FileLength-2060)/8011為整數。掃描的徑向個數為RecordNumber=(FileLength-2060)/8011。
(3)雷達型號 RadarType[] =“GLC-64”,在文件的[112~131]個字節(jié)處。
(4)時間在正確的變化范圍內(1999<Year<2050、1< Month< 12、1< Day<31、0<Hour<23、0<Min<59、0<Sec<59),依次存放在在文件的[1364~1370]字節(jié)處,其中Year占兩個字節(jié),其余占一個字節(jié)。
(5)雷達掃描的徑向個數RadarCoutNum=(File-Length-2060)/8011,存放在觀測參數結構體中。
3.3 成都784廠毫米波雷達基數據文件格式判別
(1)文件長度FileLength是基數據包大小BaseSize的整數倍,BaseSize在文件(i*BaseSize+4~i*Base-Size+7)字節(jié)處,由4 個字節(jié)位置存放。i為 0,1,2,3,…RadarCoutNum。RadarCoutNum為雷達掃描總徑向個數:RadarCoutNum=FileLength/BaseSi-ze。
(2)文件頭標記為恒定值0xa5a54321,在文件(i*BaseSize~i*BaseSize+3)字節(jié)處。
(3)年月日時分秒必須在正確的范圍內(1999<Year<2050、1<Month<12、1<Day< 31、0<Hour<23、0< Min<59、0< Sec< 59),這6個參數分別占四個字節(jié),依次存放在文件的(i*BaseSize+12~i*BaseSize+35)字節(jié)位置處。
(4)版本號Version的值為1,在文件(i*BaseSize+8~i*BaseSize+11)字節(jié)處。
(5)尾標記EndFlag為恒定值0x5a5a1234,存放在文件[i*BaseSize+BaseSize-4]位置。
4 軟件實現流程圖
利用VC2010工具編寫自動識別3種型號毫米波雷達基數據文件的軟件。軟件的基本流程圖如圖6所示。軟件設計是以文中所研究的3種型號毫米波測云雷達基數據文件自動識別判據為依據。每種型號的雷達都有5組判據。程序就是根據每個型號雷達的判據之間的差異實現基數據文件的自動識別。給每種型號的雷達定義一個識別變量SBID,SCRMP-03型毫米波雷達(SBID=1)、GLC-64型毫米波雷達(SBID=2)、成都784廠毫米波雷達(SBID=3)、其它(SBID=4)。通過流程圖(圖6)可以看出程序主要分為3個重要部分。
第一部分是對784廠毫米波雷達基數據文件的識別。首先是判斷文件的長度FileLength是否是基數據包BaseSize的整數倍,如果滿足則進入徑向循環(huán),通過上面的判別,在文件的指定位置讀取出相應的變量值,因為雷達數據是有N個徑向組成,那么每個徑向都必須滿足5組判別條件。如果每個徑向都同時滿足5組判據條件,那么循環(huán)結束并給SBID賦值為1,否則SBID為4。
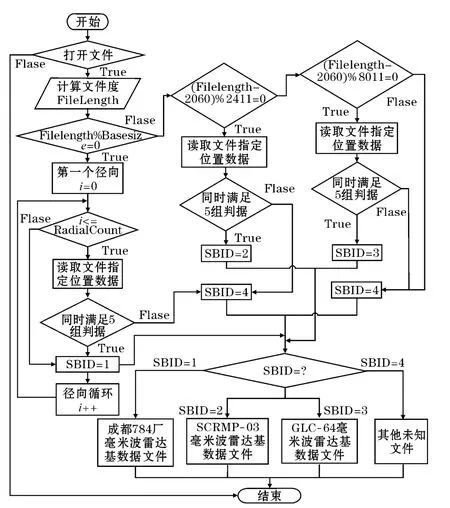
圖6 毫米波基數據文件自動識別軟件設計流程圖
第二部分是對SCRMP-03型毫米波測云雷達基數據文件的識別。同樣地,首先是計算出文件長度File-Length并判斷式子(FileLength-2060)/2411的結果是否為整數,若成立則繼續(xù)用其他4組判據條件驗證文件。如果文件同時滿足5組判別條件則此文件為SCRMP-03型毫米波測云雷達的基數據文件并給SBID賦值為2,否則給SBID賦值為4。
第三部分是對國睿公司GLC-64型毫米波雷達基數據文件的識別。判斷(FileLength-2060)/8011是否為整數,如果為整數則繼續(xù)用其他4個判別條件驗證文件是否滿足。若文件同時滿足5組判據則此文件為GLC-64型毫米波雷達基數據文件并給SBID賦值為3,否則給SBID賦值為4。
最后,根據SBID中的值來判別文件格式類型,若SBID=1,文件為成都784廠毫米波雷達基數據文件;若SBID=2,文件為四創(chuàng)公司SCRMP-03型毫米波雷達基數據文件;若 SBID=3,則此文件為國睿公司GLC-64型毫米波雷達基數據文件;若SBID=4,文件為其他未知文件。
將相應的基數據文件識別后,利用matlab工具編寫相應的繪圖程序。改繪圖軟件可以同時兼容3種型號雷達對應的產品。
5 驗證與應用
5.1 自動識別
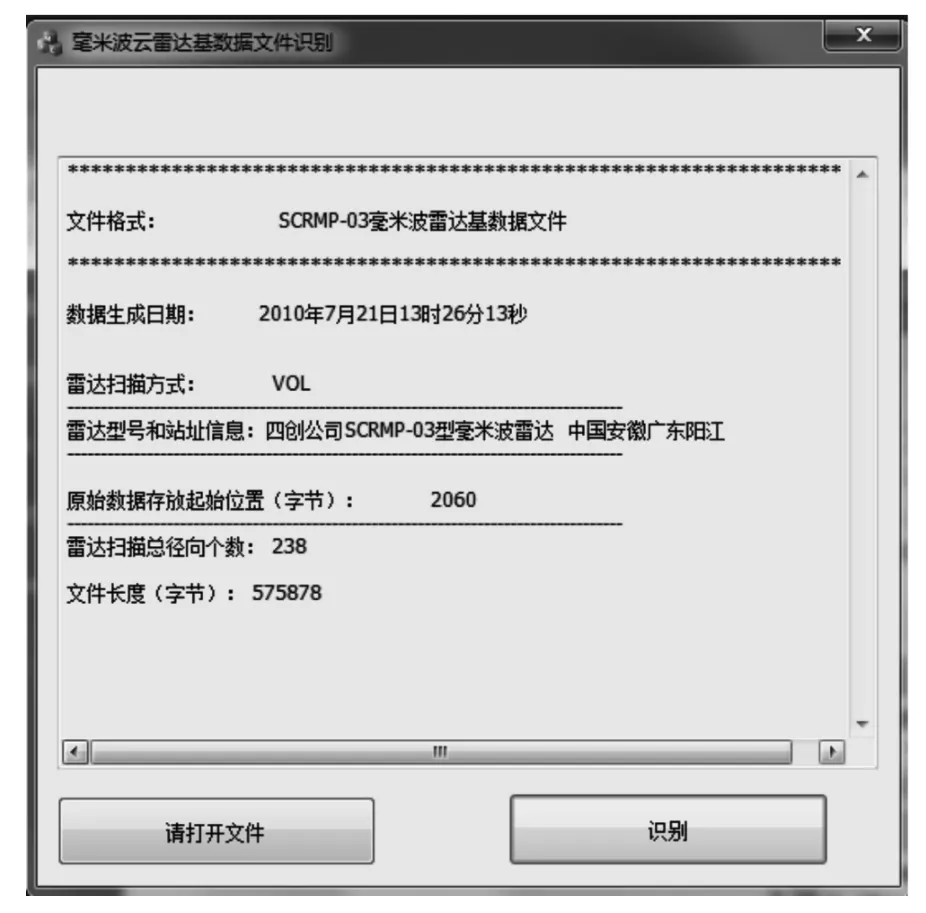
圖7 自動識別界面
根據以上判別方法結合VC編寫一個MFC對話框應用軟件來識別以上3種毫米波雷達基數據文件。隨機選取200個未知數據文件(包括文中介紹的3種型號的毫米波雷達基數據文件)來驗證。自動識別的軟件界面如圖7所示,其中的顯示結果是識別的SCRMP-03型毫米波雷達的基數據文件,界面顯示了文件里面的基本參數信息、掃描的時間信息、文件長度等。
5.2 產品顯示
通過對3種型號云雷達基數據文件的識別結果,利用Matlab工具編寫顯示軟件,該軟件可以顯示出3種不同型號雷達的反射率、速度、譜寬、退極化比4種產品以及4種不同的掃描方式(垂直定點掃描、平面PPI掃描、RHI掃描)。下面選取3種雷達不同掃描方式下產品的回波圖。
雷達反射率被定義為單位體積內全部降水粒子的雷達截面之和,其大小在一定程度上反映云、雨粒子群的情況。速度譜寬是對一個距離庫中速度離散度的度量,其與距離庫內各個反射體的運動方向和速度差別成正比[15],譜寬數據[16]在對一些災害性天氣方面具有較好的預警作用。多普勒徑向速度是指探測粒子對于雷達發(fā)射波束發(fā)生相對運動時利用多普勒效應原理所測得的散射體相對于雷達的速度。退極化比是由探測目標后向散射功率的垂直和水平分量的到的,與目標粒子的形狀、大小、介電質、取向等有關,通過LDR值可以判斷雷達探測到粒子的形狀和相態(tài)。
毫米波雷達有多種掃描模式,其中模式有:平面掃描(PPI)、垂直定點掃描、俯仰掃描(RHI)、體掃模式,文中設計的繪圖軟件,實現對這4種掃描方式得到的反射率、速度、譜寬、退極化比產品的顯示。
圖8(a)~(f)是利用所設計的繪圖軟件顯示相應產品回波圖,其中圖8(a)、(b)、(c)是2013年7月7日由784廠毫米波雷達所垂直定點掃描得到反射率、速度、譜寬回波圖,該型號雷達垂直探測盲區(qū)是375 m,因此圖中0到375 m區(qū)域是空白。圖8(d)是GLC-64型號雷達2010年7月21垂直定點掃描探測的退極化比回波圖。圖8(e)、(f)是由SCRMP-03型號雷達的兩種掃描方式得到反射率回波圖,其中圖8(e)為RHI掃描,圖的橫軸為水平探測距離,縱軸為垂直探測距離。圖8(f)為平面PPI掃描,圖中心點代表雷達所在位置。6個圓圈代表探測距離,最外圈為最大探測距離30 km,每一圈代
6 結束語
毫米測云雷達對于云的觀測十分重要,通過編寫自動識別3種毫米波雷達的基數據文件的軟件以及同時兼容這3種不同型號雷達產品的顯示軟件,節(jié)省了顯示軟件的開發(fā),有助于更好的對比分析這3種不同毫米波雷達產品。對于后續(xù)的有關研究是十分必要的,因此對于毫米波雷達的基數據文件格式分析是十分必要的。還有很多的不足,如由于目前國內毫米波雷達處于起步階段,因此文中分析的種類偏少,后續(xù)工作將繼續(xù)努力完善。
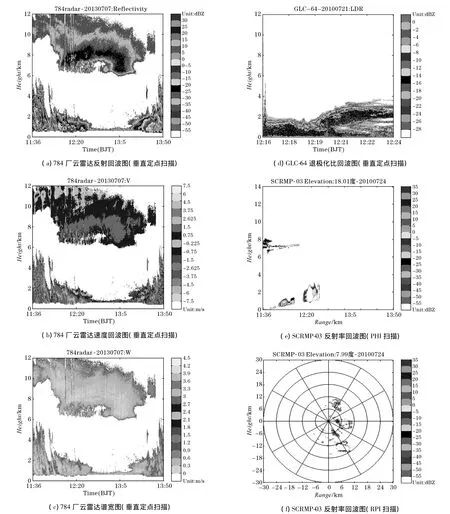
圖8 3種型號雷達不同掃描模式下反射率、速度、譜寬、退極化比4種產品回波圖
[1] 魏重,林海,忻妙新.毫米波氣象雷達的測云能力[J].氣象學報,1985,43(3):378-383.
[2] 吳舉秀,魏鳴,周杰.94 GHZ云雷達回波及測云能力分析[J].氣象學報,2014,72(2):402-416.
[3] Paulson W H,P J Petrochi,G Mclean.Operational utilization of the AN/TPQ-11 radar[J].Metereol.Mag,1994,93:337-346.
[4] Pasqualucci F.Millmeter-wave radar applications in Meteorology.Atmospheric Technology:Recent Progress in radar Meterology,Nat-Ionl Center for Atmospheric Research,1980,13.
[5] Hobbs P V ,N T Funk.Cloud andPrecipitation studies with amillimeter-wave radar,A Pictorial overvies[J].J.Atmo.OJ.Atmos.O-Ceanic Technol,1985,(2):35-38.
[6] 宋立雪.毫米波多普勒雷達RHI退速度模糊研究[D].南京:南京信息工程大學,2010.
[7] 仲凌志,劉黎平,葛潤生.毫米波測云雷達的特點及其研究現狀與展望[J].地球科學進展,2009,24(4):383-391.
[8] 樊雅文.云雷達資料訂正及應用研究[D].南京:南京信息工程大學,2012.
[9] 盛裴軒,毛節(jié)泰,李建國,等.大氣物理學[M].北京:北京大學出版社,2011:290-309.
[10] 楚志剛,銀燕,顧松山.新一代天氣雷達基數據文件格式自動識別方法研究[J].計算機與現代化,2013,215(7):180-184.
[11] 楚志剛,顧松山,王成剛.新一代天氣雷達基數據兼容方法的分析[C].第27屆中國氣象學會年會雷達技術開發(fā)與應用分會場論文集.北京:中國氣象學會,2010.
[12] 宗蓉.毫米波雷達資料分析與處理[D].南京:南京信息工程大學,2013.
[13] 王斌,肖艷姣,付志康,等.車載8mm測云雷達探測能力分析[A].暴雨新型探測資料應用技術研討會論文集[C].2011.
[14] 謝蕾,劉黎平,姚雯.毫米波雷達與雨滴譜儀觀測弱降水的對比分析[J].成都信息工程學院學報,2014,29(1):39-46.
[15] P Kollias,E E Clothiaux,M A Miller,et al.Millimeter-Wa-Velength Radars New Frontier in Atmospheric cloud and preciptitation research[J].AmericanMeteorlogicalSociety,2007,1608:1623.
[16] 苗子書.利用多普勒雷達速度譜寬資料分析譜寬[D].甘肅:蘭州大學,2006.
猜你喜歡
中國自動識別技術(2023年6期)2024-01-12 08:13:22
艦船科學技術(2022年22期)2022-12-13 03:39:42
艦船科學技術(2022年10期)2022-06-17 06:27:48
空間科學學報(2020年3期)2020-07-24 09:23:02
中國交通信息化(2019年7期)2019-10-08 09:04:40
水上消防(2019年3期)2019-08-20 05:46:08
西南交通大學學報(2018年6期)2018-12-18 02:23:20
特別健康(2018年3期)2018-07-04 00:40:18
發(fā)明與創(chuàng)新(2016年26期)2016-08-22 03:23:28
電測與儀表(2016年6期)2016-04-11 12:06:38
