基于李群李代數的車用穩定平臺加速度分析方法
2015-01-14 01:56:36劉曉
山西交通科技 2015年6期
劉 曉
(山西省交通科學研究院,山西 太原 030006)
0 引言
車載穩定平臺能夠隔離車輛受路面顛簸、車流量影響、發動機振動等環境擾動產生的六維擾動,為數字相機、激光傳感器、光學儀器提供一個相對穩定的工作平臺,已作為保障各類交通管制偵測車、多功能智能檢測車工作精度的關鍵設備[1]。并聯式穩定平臺是一個處于非慣性系環境中的復雜多剛體系統[2],一般由設備安裝平臺、運動執行器、鉸鏈、基座構成,其中基座時刻隨車振動。建立系統各剛體之間的加速度映射關系是分析設備穩定效果、建立運動學/動力學模型、制定穩定控制策略的前提,因此分析多剛體系統的加速度是開展穩定平臺研究的前提。
傳統運動學理論中通常使用三維矢量代數描述剛體的轉動和移動,即剛體的加速度分別用它的角加速度和其上一點的線加速度來描述。由于這種傳統的描述方法不具有坐標不變性,因此分析剛體加速度是一項繁瑣困難的工作,特別是對于多剛體動力系統來說,這項工作就變得十分困難,另外,建立的復雜模型將導致算法耗時,嚴重影響穩定平臺響應速度;采用Lagrange方法[3]分析剛體加速度時可回避上述問題,但該方法存在拉格朗日函數偏微分的求導這一繁雜的任務,實際上是將分析困難轉移。
近年來,一些現代數學理論被應用于多剛體系統研究中,其中螺旋理論是一種有效的工具[4]。Ball最早建立了螺旋理論的基礎,然而到目前為止,螺旋理論大多應用于剛體的速度、靜力分析和幾何綜合,只有很少的工作將螺旋理論應用于剛體加速度分析中[5]。Bokelberg等討論了速度螺旋的無窮小位移;Ridley等研究了剛體作一般運動時的加速度中心;Martinez和Duffy分析了剛體簡化加速度的合成,并指出剛體的簡化加速度具有坐標不變性。但直至目前,國際上對旋量的導數是不是剛體加速度這一問題的認識仍未統一,這也限制了其在分析多剛體系統時的應用[6]。
1 剛體加速度的六維旋量描述
令{a}和{b}分別為建立于剛體A和B上的坐標系,剛體B相對于A的速度在{a}系中的描述可定義為:

同時,式(1)是剛體B相對剛體A的運動旋量在{a}系中的六維矢量描述。在本文敘述過程中,左上標表示用于描述矩陣或矢量的坐標系,右下標表示相對運動或位置,如下標ab表示剛體B相對于剛體A的運動,也可表示點b相對于{a}系的運動或位置。展開式(1)可得:
式中:
式中:aωab表示剛體B相對于剛體A的角速度,與傳統的角速度表示一致;avab∈?3是一個三維矢量,在本文定義為剛體B相對于A的線速度,與傳統運動學理論中的線速度定義不同,avab并不是剛體B固連點b相對于{a}系的速度,而是剛體B上與{a}系原點瞬時重合點(設為a′)相對于{a}系的線速度,其數值與傳統表示并不相同。因此,基于旋量理論建立的速度描述與傳統運動學描述方式并不相同,在此稱為剛體速度,其是一個包含角速度、線速度的六維矢量。
剛體B相對A的運動旋量求導即可得到對應的剛體加速度,對式(1)兩端求時間導數可得:

對式(2)兩端求時間導數:

結合式(5)、式(6)建立剛體角加速度的旋量描述形式為:

令aaab=av˙ab,并定義aaab為剛體B相對于剛體A的線加速度,本文稱為剛體線加速度,其與傳統運動學描述方式的區別將在下節分析。由式(5)、式(6)建立其旋量描述形式為:

將式(3)、(7)代入上式,整理為:

aaab∈?3是一個三維矢量,依據李代數可證明剛體加速度表達式:
是李代數的一個元素,即a?ab∈se(3)為剛體的加速度旋量。
由于本文定義的剛體加速度旋量均是李代數空間的元素,因此李群空間元素gab的伴隨作用可給出任意兩個剛體加速度之間的變換,即存在以下關系成立:

式中:bab為剛體B相對于A的剛體加速度在{b}系中描述。
上述提供了剛體速度、加速度的六維旋量描述和變換方法,后續的研究分析將證明這種描述方法在多剛體系統加速度中的優點。
2 剛體加速度的物理意義
本節將分析剛體加速度的物理意義,并與傳統運動學描述方式進行對比。為了分析方便,令剛體B上與{a}系原點瞬時重合點為a',并令αpba'為點b指向點 a′的位置矢量;ap˙aa′、ap¨aa′分別為點 a′相對于剛體A的瞬時速度、加速度。應用同一剛體上不同點之間的速度和加速度的變換公式可得到以下關系式:
由點a′所處幾何位置可到apba′=-apab成立,結合上式,剛體線加速度可整理為:

為了更明確地解釋上式包含的物理意義,假設點s為剛體B螺旋運動軸線上的一點,apsa′為點s到點a′的位置矢量,如圖1所示。依據螺旋理論點a′的速度可寫為:




上述分析可以看出,剛體加速度的傳統運動學描述是用剛體的角加速度和剛體上固定點的線加速度構成,而剛體加速度的旋量描述是由剛體的角加速度和剛體上瞬時與所用坐標系原點重合點的無向心加速度組成。上述兩種描述方式的區別主要在于:a)剛體線加速度不是用剛體上某一固定點來分析描述,而是采用不同點來分析計算,即在運動過程中的各瞬時都采用與所用坐標原點重合的點進行描述;b)剛體線加速度數值大小為剛體上瞬時與所用坐標系原點重合點的無向心加速度。
為進一步明確剛體加速度的物理意義,結合點s、點a′,應用同一剛體上不同點之間速度和加速度的變換公式可得:

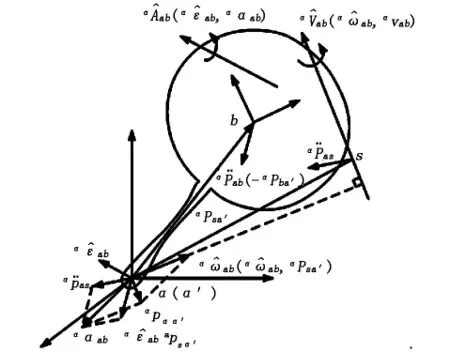
圖1 剛體空間加速度的物理意義
將式(14)代入式(13),得到簡化表達式為:

因此,剛體線加速度又可以看作是由剛體瞬時轉軸上一點加速度和所用坐標系原點相對于瞬時轉軸的切向加速度合成。
3 多剛體系統加速度伴隨變換
基于上述建立的描述方法及物理意義,分析多剛體系統中各剛體加速度之間的運動變換關系,為建立并聯式車載穩定平臺運動學、動力學模型提供依據。
多剛體系統由3個剛體構成,分別為剛體A、B、C,對應的坐標系為{a}、{b}、{c},{c}系建立于剛體 C上,gac、gbc分別為剛體 C相對于{a}系、{b}系的位姿變換矩陣,結合式(1),建立剛體C相對于剛體A的速度表達式為:

式中:g˙ac=g˙abgbc+gabg˙bc、gac-1=gbc-1gab-1.
通過對式(15)求時間導數,建立剛體C相對于剛體A的加速度表達式為:
對式(16)展開,結合式(1)、(5)、(15)將其整理為式(17)最簡形式:

同理,使用相同的方法可建立剛體C相對于剛體A的加速度在{c}系中的表達式為:

上述建立了當多剛體系統有3個剛體時,各剛體加速度之間的變換關系。將上述方法推廣到多剛體系統中,令多剛體系統包含(n+1)個剛體,其中基座N0、運動剛體N1……Nn;慣性坐標系{0}與基座N0固連、非慣性坐標系{i}與第i個剛體Ni連接,如圖2所示。由于篇幅有限,利用相同方法建立該系統第k個剛體相對于慣性坐標系{0}及非慣性坐標系{k}的加速度表達式為:
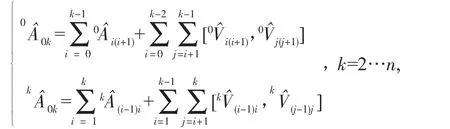
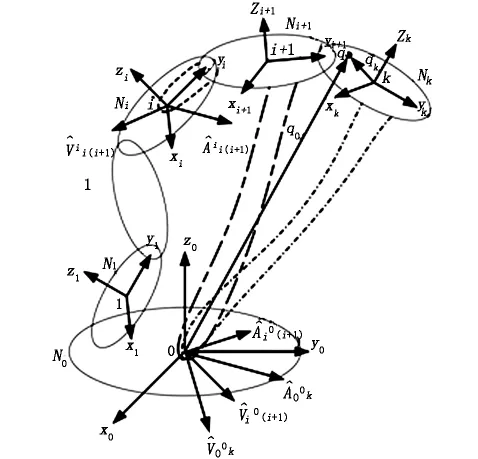
圖2 多剛體系統速度、加速度描述
4 結論
a)基于運動旋量的李群表達式,給出了剛體加速度的旋量描述,并提供了剛體加速度在不同坐標系中的變化關系式。
b)揭示了所述剛體加速度的物理意義,即剛體角加速度與傳統描述相同;剛體線加速度為剛體上瞬時與參考系原點重合點的無向心加速度,即該點加速度與其繞瞬時軸轉動的向心加速度之差。
c)基于旋量的剛體動力學理論基礎,導出了多剛體系統中各剛體加速度之間的伴隨變換表達式,提供了一種分析復雜多剛體系統動力學的有效方法。
這些概念和公式為基于李群李代數直接采用六維表示分析非慣性系并聯式車載穩定平臺特性和動力學奠定了基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
