基于Surfacelet變換視頻自適應去噪
2015-01-17 05:47:12王佳希
電子設計工程 2015年2期
關鍵詞:方法
王佳希,曹 寧,鹿 浩,陳 亮
(河海大學 計算機與信息學院,江蘇 南京 211100)
視頻在采集、傳輸和變換中很容易受到電子設備和場景環境的干擾,導致原視頻中混雜了噪聲干擾,嚴重影響了視覺效果,并且給對視頻進一步的分析處理帶來了許多不便。由于噪聲將給視頻識別帶來很大干擾,造成誤判或漏判,所以消除或減少噪聲是視頻圖像預處理的關鍵。
自20世紀末以來,對高維信號進行多方向多尺度分析成為研究熱點,多尺度多方向特征變換在視頻處理方面得到了廣泛應用,并取得了良好的去噪效果。2002年,Donoho在多分辨率Ridgelet思想的基礎上提出輪廓波Contourlet變換[1],它是一種真正的圖像二維表示方法,給圖像處理提供了多分辨率、多方向性的擴展,但是有劃痕現象,缺乏平移不變性。2005年Yue Lu和Minh N.Do將多尺度金字塔和多方向濾波器組(NDFB)結合,提出了Surfacelet變換[2-3]。該變換能有效地捕獲和表示光滑表面信號的奇異性,具有平移不變性、完全重構、低冗余、多尺度多方向等性質,這種變換在視頻等多維信號處理中可以獲得較好效果,非常適合視頻處理。本文提出基于Surfacelet變換視頻自適應去噪方法。通過仿真實驗,驗證該方法應用在視頻處理方面可以獲得更好的視覺效果和有效地提高PNSR值,驗證了該變換方法的優越性。
1 Surfacelet變換
1992年,Bamberger和Smith提出方向濾波器組DFB[4](Dimensional Directional Filter Banks)的概念,DFB能有效的對二維信號進行方向分解。2005年Yue Lu和M.N.Do提出多維方向濾波器組NDFB的設計方法[2-3],多尺度分解和NDFB結合就構成一個新的變換——Surfacelet變換。
1.1 方向濾波器組
Surfacelet變換的核心思想是基于高維方向濾波器組(NDFB)的。在實際應用中,三維信號是最常見的,而且本文研究的視頻屬于三維信號,所以本節簡介三維情形的NDFB,即3D-DFB[5]。
三維DFB頻域分割如圖1所示。
三維方向濾波器組對信號的分解,主要經過兩個層次來完成:第一層次分解過程是由三通道非抽取濾波器組將輸入的三維信號的頻譜分解成3個沙漏型子帶來完成;第二層次分解,首先對三通道非抽取濾波器組的各輸出通道作三維頻率分解。一個信號由三維方向濾波器組的單個通道分解后得到個2l2+l3
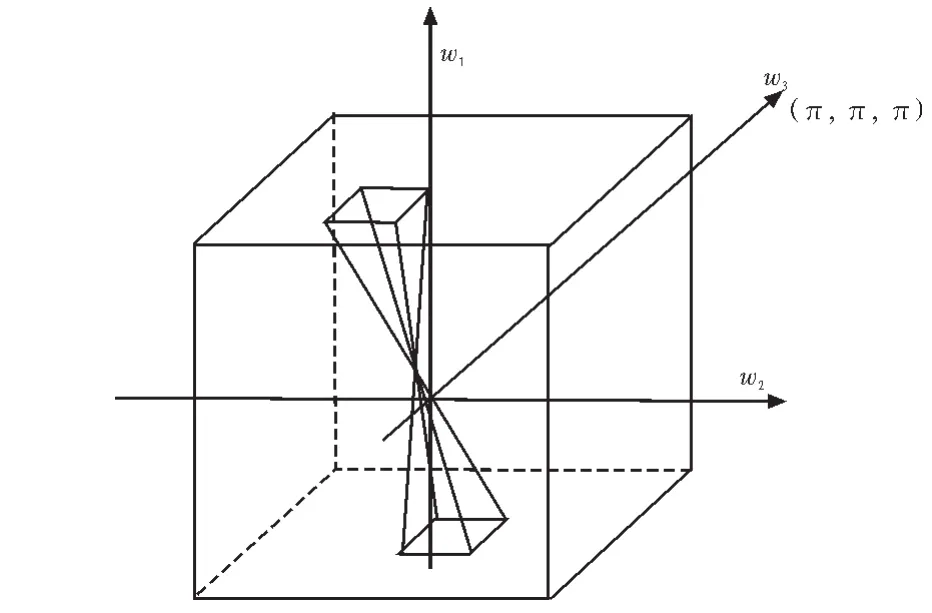
圖1 三維DFB頻域分割Fig.1 The segmentation of 3DDFB in frequency domain
方向子帶,其中l2表示第一個DFB的分解層數,l3表示第二個DFB的分解層數。因此由3DFB分解后得到的方向子帶數一共為3×2l2+l3。NDFB運用了一種簡單的、高效的樹形結構,可以對任何高維信號分解。
1.2 Surfacelet變換結構
完整的Surfacelet變換是由方向濾波器組和多尺度分解組成完成的。該變換的多尺度分解采用一種新的塔式結構來實現。Surfacelet變換結構如圖2所示。
圖 2 中,s(w)表示反混頻濾波器,Di(w)(i=0,1)表示高通濾波器,li(w)(i=0,1)為低通濾波器,其中反混頻濾波器的作用是可以避免上抽樣操作帶來的混頻現象。將圖2中虛線框中的結構遞歸的插入在an+1和sn+1后可以獲得更高尺度的分解。
2 基于Surfacelet變換視頻自適應去噪
2.1 基于Surfacelet變換的視頻去噪算法
Surfacelet變換自適應閾值分3步確定:
1)對變換后不同尺度的噪聲標準差依次進行估計。
首先,本文用中值估計法對第一層分解的噪聲標準差進行估計計算[4-6]:

其中w(m,n,k)是第一層分解的高頻系數,最精細尺度高頻子帶中,噪聲最大,根據這一層估計噪聲標準差是相對精確的。
其次,噪聲標準差在不同尺度上沿分解層數近似為指數分布[7],而同一尺度內不同分解方向的噪聲標準差基本不變,由此得到各尺度的噪聲標準差估計,第層的噪聲標準差:

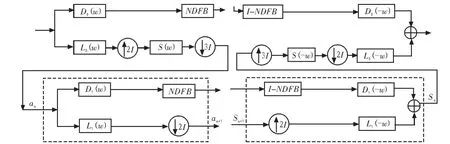
圖2 Surfacelet變換結構圖Fig.2 Surfacelet transform structure
2)根據不同尺度的噪聲標準差設置不同尺度的初始閾值。
閾值選取時,對各尺度的噪聲先估計一個初始閾值,第層的初始閾值:

其中MNP為第層Surfacelet變換系數所在方向子帶的維數大小,σl為第層的噪聲標準差。
3)根據相同尺度內系數的領域相關性對初始閾值λl進行自適應調整。
Surfacelet變換屬于去相關變換,但是視頻信號經過該變換后的系數并非獨立的,分解的系數在相同尺度和相同方向子帶鄰域內有著比較強的相關性。在這理論基礎上,對Surfacelet變換系數的閾值自適應地調整。接下來就閾值的調整進行介紹。
假設 ci,j,k為 Surfacelet變換后的一個高頻系數 ,Ai,j,k是 以高頻系數 ci,j,k為中心的一個 n×n×n 的鄰域窗口,n 的數值一般選定為 3、5、7、9 等。 令 s2i,j,k為該三維 鄰 域 窗 口 內 變 換得 到的系數平方和,即

其中,
此處, 利用調整因子 μi,j,k來自適應地調整 Surfacelet系數閾值。每個高頻系數 ci,j,k,通過閾值調整后其自適應閾值表示為:


本文算法采用軟閾值函數對變換系數進行閾值處理,閾值公式為:

2.2 實現步驟
基于Surfacelet變換的視頻自適應去噪算法充分利用了表面波變換域內系數的鄰域間的相關性,并克服了Surfacelet閾值去噪算法通常只單獨考慮Surfacelet系數的不足,自適應地調整每個Surfacelet系數的閾值。算法步驟如下:
1)對帶噪視頻圖像進行Surfacelet變換。
2)設定第一層噪聲標準差 σ1=Median|(w(m,n,k))|/0.6745,然后根據不同尺度的噪聲標準差沿分解層次近似為指數分布,得到不同尺度的噪聲標準差 σl=σ1×e1-l1,2。

4)根據調整因子,對各尺度內系數的初始閾值進行調整,計算出各尺度各方向子帶系數的自適應閾值。
5)利用得到的各個系數自適應閾值,對各個子帶系數進行軟閾值收縮處理。
6)對Surfacelet變換系數軟閾值收縮處理后作Surfacelet逆變換,得到去噪后的視頻。
3 實驗結果和分析
本節將本文算法和其他一些現有的視頻去噪算法進行對比,用數據評價標準和視頻直觀效果來展示本文算法的優越性。
3.1 評價指標
當需要對去噪方法的降噪性能進行定量評價時,本文采用峰值信噪比(PSNR)來度量,其值越大對應的去噪后視頻質量也就越好。
PSNR的定義式為:

其中N是單幀視頻圖像像素數,MSE是單幀視頻圖像的均方差:

其中fl是重建后各像素的灰度值,f為原圖像各像素的灰度值。
3.2 實驗條件和內容
實驗條件:實驗使用了圖3所示的視頻,大小為的Mobile視頻。仿真環境是在Matlab下實現的。
實驗內容:在上述實驗條件下,針對圖3所示的Mobile視頻序列,將Visualshrinkage方法(Visual-SH)、硬閾值去噪方法和本文提出的自適應閾值去噪方法分別應用到Surfacelet變換域中進行視頻去噪,用本文的自適應去噪方法和上述的兩種方法進行對比。
3.3 視頻去噪效果

圖3 Mobile視頻序列Fig.3 Mobilevideosequence
對去噪算法的去噪性能在3.1已表明采用PSNR值來作客觀評價,視頻是由圖像序列一幀幀構成的,而PSNR值主要體現了圖像的質量,因此本文采用去噪后視頻的各幀圖像PSNR的均值(AveragePSNR)作為客觀評價指標,。對Mobile測試視頻分別加入零均值,標準差為20、30、40的高斯白噪聲,去噪方法使用3.2實驗內容中提到3種視頻去噪的方法,對比的實驗結果如表1所示。
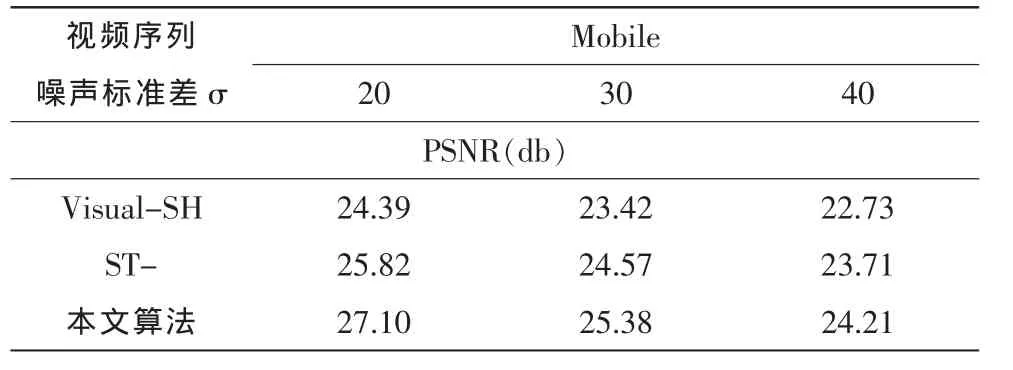
表1 3種去噪方法的AveragePSNR值比較Tab.1 TheresultsAveragePSNRofthethreedenoisingmethods
從表1可知,視頻序列在受到不同等級程度高斯噪聲影響下,與其他兩種方法相比,本文算法得到的去噪后的視頻圖像的AveragePSNR都有了一定的提高。對于Mobile視頻序列,本文算法得到的平均PSNR值提高了0.5dB到1.3dB。此外,從表中可以看出,視頻受到噪聲污染程度越低,本文的自適應去噪算法相比其他的視頻去噪算法的效果提高得越明顯。
圖4給出了經本文提出的自適應閾值去噪方法及其他兩種去噪方法對Mobile視頻序列去噪后的視覺效果圖像。圖像的選取均是視頻Mobile序列中的第182幀,所加的高斯噪聲的標準差為30。其中,圖4(a)為原始Mobile視頻圖像,圖4(b)為加了標準差為 30噪聲的視頻圖像,圖4(c)為利用 Visual-SH方法去噪得到的視頻圖像,圖 4(d)為采用硬閾值方法去噪得到的視頻圖像,圖4(e)為運用本文提出的基于Surfacelet變換自適應閾值去噪算法去噪后的視頻圖像。
從圖4(c)中可以看出,通過Visual-SH方法去噪的圖像由于去除力度過大出現了明顯的邊緣模糊現象;從圖4(d)中可以看出,通過ST-方法去噪后的圖像由于去除力度不夠出現有振鈴現象,在視頻圖像中還殘有較多的噪聲;圖4(e)給出了本文算法的去噪效果圖像,可以看出,該算法由于自適應調整了Surfacelet變換后的各個系數,很好的保留視頻圖像的細節信息和邊緣,有效的去除了視頻中的含有噪聲,該算法的去噪效果相比其他去噪算法更加突出。
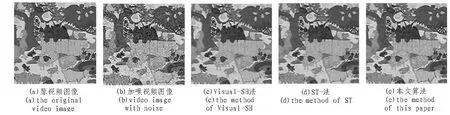
圖4 Mobile視頻的去噪處理結果圖Fig.4 The results of the denoising methodsfor mobile video
4 結束語
本文提出了一種基于Surfacelet變換的視頻自適應閾值去噪算法。根據Surfacelet變換的視頻信號的系數特性和噪聲分布特征,經過Matlab仿真實驗推導得到Surfacelet變換視頻自適應去噪方法,充分考慮了Surfaclet變換域內系數的鄰域相關性,對每個系數進行自適應收縮調整。本文的算法可以在濾除噪聲的同時保持圖像的細節信息。因此,相比其它現有的去噪方法,本文的算法可以很好地濾除視頻中噪聲同時有效地保持了圖像的紋理細節和邊緣信息,不僅在客觀評價指標上有了顯著的提高,該算法在視頻的主觀視覺效果上也有了很好的改善。
[1]DO M N,Vetterli M.Thecontourlet transform:an efficient directional multiresolution image representation[J].IEEE Transaction on Image Processing,2005,14(12):2091-2106.
[2]Yue Lu,Do M N.3-D directional filter banks and surfacelets[C].Invited Paper,Proc.of SPIE conference on Wavelet Applications in Signal and Image Processing XI,San Diego,USA,2005.
[3]Yue Lu,Do M N.Multi-dimensional directional filterbanks and surfacelets[J].IEEE Trans.Image Processing.,2007,16(4):918-931.
[4]Bamberger R H,Smith M JT.A filter bank for the directional decomposition of images:Theory and design[J].IEEE Trans.Signal Process,1992,40(4):882-893.
[5]閆敬文,屈小波.超小波分析及應用[M].北京:國防工業出版社,2008.
[6]Chang SG,Yu B,Vetterli M.Adaptive wavelet threshold for imagedenoising and compression [J].IEEE Trans.Image Process,2000,9(9):1532-1546.
[7]Yuan X H,Bucklles B P.Subband noise estimation for adaptive waveletshrinkage[C]//ICPR,Proceeding of the17th Internationa]Conference on PatternRecognition,2004.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
