機載相控陣火控雷達的技術(shù)特征及干擾研究
2015-01-21 06:54:02姬憲法
機電產(chǎn)品開發(fā)與創(chuàng)新 2015年3期
姬憲法
(空軍第一航空學院,河南 信陽 464000)
0 引言
機載火控雷達的主要作用是測定目標的空間位置,提供給火控系統(tǒng),通過制導武器對目標實施攻擊。相控陣機載火控雷達是采用相控陣天線的機載火控雷達。它是一種電子掃描雷達,由計算機控制,用電子的方法實現(xiàn)天線波束指向在空間的轉(zhuǎn)動或掃描的電掃雷達系統(tǒng),克服了機械掃描雷達慣性延遲的不足,波束靈活,能迅速而精確地控制和變換波束形狀、數(shù)目和掃描圖形,使得機載相控陣火控雷達實現(xiàn)了同時多目標跟蹤和攻擊、同時多功能和低截獲概率能力,并降低了的自身的雷達截面積,可提高飛機的作戰(zhàn)能力和戰(zhàn)場生存能力。
1 相控陣天線原理
相控陣天線有多種形式,如線陣、平面陣、圓陣、圓柱形陣列、球形陣和共形陣等,但都是從陣列天線發(fā)展起來的。陣列天線通常由多個偶極子天線單元組成,偶極子天線具有近似的無方向性天線方向圖,天線增益很低,在自由空間內(nèi)增益只有6dB 左右,為了獲得較高的增益,將多個偶極子天線單元按一定的規(guī)則排列在一起,形成一個大的陣列天線。下面我們以圖1 所示陣列天線說明相控陣天線的相位掃描原理。
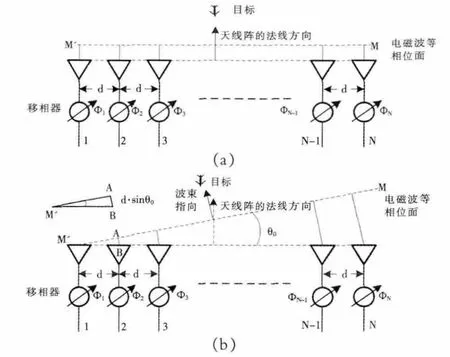
圖1 相位掃描的基本原理框圖
圖1 所示是N 個帶有移相器的相同單元的線性陣列天線,相鄰單元間隔為d。與直線陣相垂直的方向為天線陣的法線方向,稱為 “基本軸”。設各單元移相器輸入端均為等幅同相饋電,且饋電相位為零。各個移相器能夠?qū)︷伻胄盘柈a(chǎn)生0~2π 的相移量,按單元序號的增加其相移量依次為Ф1、Ф2、Ф3、…、ФN-1、ФN。
(1)當目標處于天線陣法線方向時,要求天線波束指向目標,即波束峰值對準目標,如圖1(a)所示。
由陣列天線的原理可知,只要各單元輻射同相位的電磁波,則波束指向天線陣的法線方向。根據(jù)陣列天線這一結(jié)論,若對相控陣天線中各個移相器輸人端同相饋電,那么,各個移相器必須對饋人射頻信號相移相同數(shù)值 (或均不移相),才能保證各單元同相輻射電磁波,從而使天線波束指向天線陣的法線方向。換句話說,各個移相器的相移量,應當使相鄰單元間的相位差均為零,天線波束峰值才能對準天線陣的法線方向。
(2)在目標位于偏離法線方向一個角度θ0時,若仍要求天線波束指向目標,則波束掃描角(波束指向與法線方向間的夾角) 也應為θ0,如圖1(b)所示。
倘若波束指向與電磁波等相位面垂直,即波束掃描一個θ0角度,則電磁波等相位面也將隨之傾斜、見圖中M′M 方向,它與線陣的夾角也為θ0。這時,各單元就不應該是同相輻射電磁波,而需要通過各自的移相器,對饋入射頻信號的相位進行必要調(diào)整。
首先討論單元1 與單元2 的移相器對饋入射頻信號的相移情況。假設單元1 與單元2 的移相器分別對饋入的射頻信號相移了Ф1和Ф2,那么單元1 輻射的電磁波到達等相位M′點的相位為Ф1,而單元2 輻射的電磁波由于在空間多行程一段距離AB,故到達等相位面時的相位為:
根據(jù)等相位條件,在等相位面上則有:
設兩單元的相位差為Ф,上式可寫成:
即兩單元的相位差Ф,補償了兩單元波程差引起的相位差,使得兩單元輻射的電磁波在θ0方向能夠同相相加,得到最大值,即波束指向了θ0方向。同樣的分析可以得出單元2 與單元3 之間的相位差也為Ф:
依此類推,任意兩單元的相位差都相同。這就是說,通過移相器的調(diào)整,使得各單元輻射電磁波的相位按其序號依次導前一個Ф,分別為Фb、Ф2=Ф1+Ф、Ф3=Ф1+2Ф、…、ФN=Ф1+﹙N-1﹚Ф,使電磁波的等相位面向左傾斜,波束方向偏離天線陣法線方向向左一個θ0角度。
同理,通過移相器的調(diào)整,若各單元輻射電磁波的相位按其序號的增加依次滯后一個Ф,分別為Ф1、Ф2=Ф1-Ф、Ф3=Ф1-2Ф、…、ФN=Ф1-﹙N-1﹚Ф,則電磁波的等相位面向右傾斜,波束指向偏離天線陣的法線方向向右一個θ0角。由前面的公式可得出θ0與Ф 的定量關(guān)系為:
此式表明,在雷達工作波長與單元之間的間距d 一定的情況下,波束指向角θ0隨Ф 而變化。只要控制移相器使各單元間產(chǎn)生相同的相移增量,并且其大小和正負又是可變的,則波束就可以在范圍內(nèi)掃描。
簡單來說,控制移相器對饋入射頻信號產(chǎn)生的相移,即可改變電磁波等相位面的位置,從而改變天線波束的指向,達到掃描的目的。這就是相控陣天線實現(xiàn)電掃描的基本原理。
2 相控陣雷達技術(shù)特征
2.1 天線波束快速掃描能力
天線波束快速掃描能力是相控陣雷達主要技術(shù)特點。這一特點來自于陣列天線中各天線單元通道內(nèi)信號傳輸相位的快速變化能力。正是由于相控陣天線的波束快速掃描的技術(shù)特點使得相控陣火控雷達具有高搜索數(shù)據(jù)率、高跟蹤數(shù)據(jù)率、多目標搜索與跟蹤、實現(xiàn)多種雷達的功能。
2.2 天線波束形狀捷變能力
天線波束形狀捷變能力是指相控陣天線波束形狀的快速變化能力。天線波束形狀捷變能力使相控陣天線可快速實現(xiàn)波束賦形和實現(xiàn)空時二維自適應處理(STAP)。
空時二維自適應處理(STAP)是相控陣雷達在空域與頻域同時實現(xiàn)對雜波干擾進行抑制的方法,用于機載相控陣火控雷達抑制地面雜波。機載雷達在強地物背景中檢測目標,采用距離門多普勒濾波方法,對每一個要檢測的距離單元,即可能存在目標的距離單元,通過多普勒濾波器組對目標回波進行頻譜分析,從速度上分辨目標與雜波,而在不同角度上與不同距離上地物的雜波頻譜是不同的,與雷達載機飛行速度及姿態(tài)有關(guān),而且地物雜波信號是由與被檢測單元同樣距離的所有天線主瓣與副瓣照射的地物信號疊加而成,主瓣雜波對目標回波的信號的遮蔽最大。要檢測雷達主瓣照射區(qū)內(nèi)某一距離單元內(nèi)是否存在目標,首先在每一天線單元或子天線級別上,對該單元的接收信號進行頻譜分析,即頻域濾波,然后對每一個濾波器的輸出在進行自適應空域濾波,即實現(xiàn)自適應能力方向圖形成,在該濾波器最大值對應的角度上形成接收方向圖凹口。就是對回波信號的每一個多普勒頻率分量,分別形成各自的天線方向圖,方向圖的最大值均指向預定要檢測或跟蹤目標的方向,而這些方向圖凹口則分別對準產(chǎn)生該多普勒頻率的強地物所在方向。
2.3 空間功率合成能力
空間功率合成能力使相控陣機載火控雷達實現(xiàn)了發(fā)射電磁波能量的低峰值功率、高脈沖能量和高平均功率,提高其探測性能。
陣列天線的每一個單元通道或每一個子天線陣上設置一個發(fā)射信號功率放大器,依靠移相器的變化,使發(fā)射天線波束定向發(fā)射,既將各單元通道或各子陣通道中的發(fā)射信號聚焦于某一空間方向。
2.4 多波束形成能力
相控陣雷達通過波束轉(zhuǎn)換控制信號可以方便地在一個重復周期內(nèi)形成多個指向不同的發(fā)射波束和接收波束。用同一個孔徑可以同時產(chǎn)生多個獨立的波束,即將一部分面陣對應產(chǎn)生一個波束,另一部分面陣對應產(chǎn)生另一個波束,各個波束又可以具有不同的輻射功率、波束寬度、目標駐留時間、重復頻率和重復照射次數(shù)等。各個波束可以實現(xiàn)統(tǒng)一控制和分別控制,用于對目標的一般搜索、重點搜索和跟蹤。
2.5 強抗干擾能力
相控陣雷達天線波束的快速掃描、天線波束形狀捷變、自適應空間濾波、自適應空時處理能力以及多種信號波形的工作方式,使得相控陣雷達在體制上具有強的抗干擾潛在性能。在相控陣雷達中又采用了單脈沖測角技術(shù)、脈沖壓縮技術(shù)、頻率分集技術(shù)、頻率捷變和自適應旁瓣抑制技術(shù),進一步提高了其抗干擾性能。
相控陣機載火控雷達具有高增益和低副瓣的天線陣列,副瓣電平可達-50~-40dB,由于副瓣電平低,可以使雷達少受相鄰頻段雷達的互擾,使掩護式干擾機的等效干擾功率增大,給干擾機制造增加困難,提高了雷達的抗干擾能力;主瓣波束很窄、掃描方式迅速靈活,使偵察接收機可接收的脈沖數(shù)少而難以實現(xiàn)跟蹤,低副瓣技術(shù)的采用,又要求偵察接收機靈敏度高,動態(tài)范圍大,信號測定瞬時迅速,使得偵察工作難以進行;波束調(diào)零技術(shù)的采用,使其易于對抗針對雷達天線副瓣的干擾。
3 對相控陣機載火控雷達的干擾研究
對相控陣機載雷達的干擾要從雷達原理、電子對抗原理等方面入手,從原理角度分析相控陣機載火控雷達自身固有的弱點,才能找到對應的干擾辦法。從原理上講,機載相控陣火控雷達有如下弱點: 一是對所有的電子信號,只要在雷達設備的通帶內(nèi)的信號,它不分敵我,都能接收;二是不論雷達采用什么樣的信號處理方式,只要干信比達到一定值時,它就不能干擾和有用信號的混合體中,提取有用信號;再一方面雖然相控陣雷達天線副瓣低,而且還可以采取副瓣調(diào)零等措施,但是它的天線副瓣仍然不可能為零,副瓣電平是客觀存在的,副瓣干擾有機可乘。
相控陣機載火控雷達實質(zhì)也是一部雷達設備,也要遵循雷達的基本工作原理,也具有上述弱點,因此只要是在雷達接收通道通帶內(nèi)的無線電信號,都能進入到雷達,無法回避;其次提高進入接收通道的電信號 (包含有用信號和干擾信號)干擾信號能量,只要干信比達到一定值時,雷達就不能從干擾和有用信號的混合體中提取有用信號,直接影響雷達對目標的探測。根據(jù)上述分析,可采用以下方法實施電子干擾。
(1)由于天線副瓣的存在,因此通過增大干擾機功率,可進行副瓣干擾;或者直接對雷達實行寬帶噪聲干擾。強干擾信號進入雷達的接收通道可降低雷達接收信號的的信噪比,直至接收機達到飽和狀態(tài),破換雷達接收機的正常工作。
(2)從戰(zhàn)術(shù)層面采用多機干擾,協(xié)同工作。相控陣雷達具有自適應空間濾波能力,能自適應地在干擾方向形成天線方向圖零點,因此,單部干擾機無法對其形成有效的干擾。但是從原理角度分析自適應空間濾波需要自適應地計算空間矢量,而計算空間矢量需要空間取樣,也要消耗計算時間,即自適應時間。采用兩部或兩部機載干擾設備協(xié)同使用,分時輪流工作,即可破壞雷達自適應空間濾波的精確性和穩(wěn)定性,從而達到有效干擾的目的。
4 結(jié)束語
機載火控雷達的干擾與抗干擾是矛和盾的關(guān)系,二者在對抗過程中不斷的發(fā)展、提高。相控陣機載火控雷達技術(shù)先進,優(yōu)勢明顯,但是并非無懈可擊,只要找準其弱項與不足,干擾方法得當,總能見效。
[1] MerrillSkolink.雷達手冊[M].北京:電子工業(yè)出版社,2010.
[2] 張光義,趙玉潔.相控陣雷達技術(shù)[M].北京:電子工業(yè)出版社,2007.
[3] 張錫祥,肖開奇,顧杰.新體制雷達對抗導論[M].北京:北京理工大學出版社,2010.
[4] 張明友,汪學剛.雷達系統(tǒng)[M].北京:電子工業(yè)出版社,2006.
[5] 嚴利華,姬憲法,梅金國.機載雷達原理與系統(tǒng)[M].北京:航空工業(yè)出版社,2010.
[6] 梅金國,嚴利華,鐘循進.機載PD 雷達原理[M].北京:軍事科學出版社,2002.
[7] G.W Stimson;吳漢平(譯).機載雷達導論[M].北京:電子工業(yè)出版社,2005.
[8] 丁鷺飛,耿富錄,陳建春.雷達原理[M].北京:電子工業(yè)出版社,2009.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
