一種高壓線巡檢機器人的設計研究
2015-01-21 06:54:04黃榮舟李炳川汪明輝
機電產品開發與創新 2015年3期
關鍵詞:設計
黃榮舟,李炳川,陳 果,汪明輝
(西南科技大學,四川 綿陽 621010)
0 引言
高壓輸電線路長期暴露于野外,存在線路老化、電器閃絡、材料老化等問題,需要及時發現并予以修復。傳統的地面目測法勞動強度大,工作效率和探測精度低;航測法盡管探測效率和精度高,但技術難度大、運行費用高。為了解決上述問題,本文設計了一種高壓線巡檢機器人,其主要特征是能在電線上行進、具有一定的避障和爬坡能力,其避障方式為遙控或手動控制。
1 障礙物模型
在設計之初,本文通過查詢高壓線傳輸相關資料得知,高壓線上常見的保護金具有懸垂線夾、防震錘、壓線管等,故本文將高壓線上的障礙物簡化為以下三種: 壓線管,防震錘,懸垂線夾。障礙物模型與參數如圖1 所示。
2 機器人結構設計
本文設計的高壓線巡檢機器人能在電線上移動,完成線路的檢測任務。機器人在線上的行進分為兩個過程,其一為線上移動,其二為越障。針對機器人的行進特點,本文設計了以連桿機構為主的機械本體結構,以實現機器人在線上的行進與越障。機器人模型如圖2 所示,圖中的虛線為電線。機器人的機械結構主要由三部分組成:行走輪、開合掌機 構、滑 臺 機構。機器人依靠三對行走輪在線上行進,行走輪可以直接通過高壓線上的小型障礙物;開合掌機構的升降功能可改變行走輪的高度和開合角度,從而越過障礙物;機器人在越障和爬坡過程中通過移動滑臺機構改變質心,保證自身行進的穩定性。

圖1 障礙物模型Fig.1 Model of obstacles
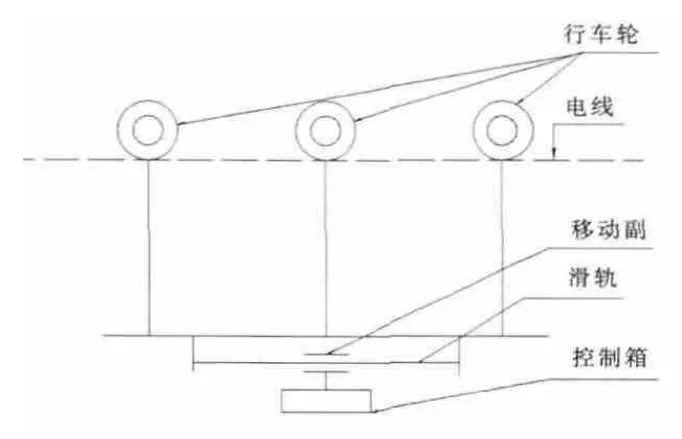
圖2 機器人簡圖Fig.2 Schematic diagram of the robot
2.1 行走輪設計
本文設計的行走輪如圖3 所示。圖中60°的夾角增大了線與行走輪之間的摩擦力,增加小車的行走能力以及提高行走的坡度。由于行走輪的左右兩個半輪具有離合性,在兩個半輪合并時,為了保證它們之間的轉動同步同時減少能量損失,故在左右輪上分別加工處理成帶有互補形狀的方塊,使之能夠正確嚙合。
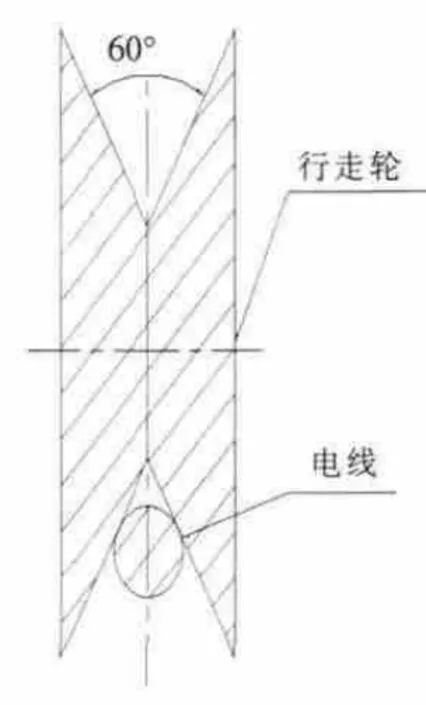
圖3 行走輪Fig.3 Wheel
2.2 開合掌機構的設計
開合掌機構為連桿與絲杠的組合機構,通過絲杠控制連桿機構運動,從而使行走輪開合、升降。當前方有障礙物時,兩個開合掌機構固定不動,另一個開合掌機構作為工作機構,通過工作的開合掌機構的張開使一對行走輪之間產生一定角度,并向上抬升。當工作的開合掌機構順利通過障礙物后,需要對線路重新定位,定位成功后緩慢將工作的開合掌機構的移動副下移,使工作的開合掌機構的輪子與線路重新夾緊,從而順利通過電線上的障礙物,繼續移動行走。
如圖4 所示為開合掌機構閉合和開合兩種狀態圖。開合掌機構能夠在閉合狀態下通過壓線管與防震錘,在開合狀態時通過懸垂線夾。設BC 兩點間的距離為l1,AB 兩點間的距離為l2,BF 兩點間的距離為l3,FG 兩點間的距離為l4。
開口度是衡量該機構越障能力的指標,設開口度為op,可得:
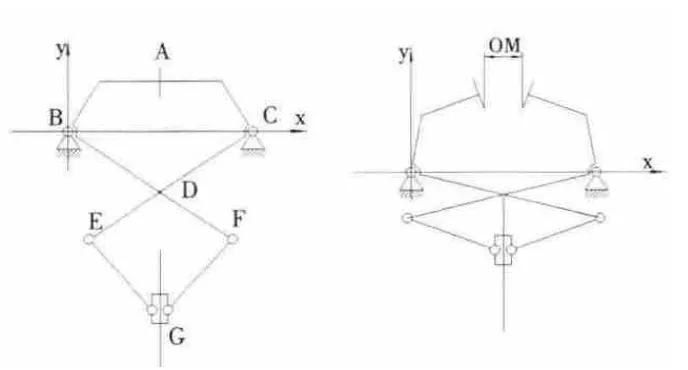
圖4 開合掌機構Fig.4 Link and screw structure
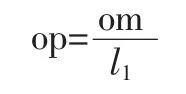
op 取值范圍為(0,1),設a邊與x 軸的初始夾角為θ,變化量為△θ,則行走輪半徑r 和開合過程中行走輪相對豎直線角度的變化也為△θ,設行走輪中心開合距離為om',可得:
om'=om+2rsin△θ
行走輪中心的豎直位移為:
Sy=l2sin(θ+△θ)-l2sinθ
水平位移為:
Sx=0.5l1-l2cos(θ+△θ)
故行走輪中心的合位移為:

當行走輪的直徑相對l1、l2較小時,行走輪可以看做一個質點,開合掌機構在開合狀態下,行走輪可通過障礙物的半徑即為S。設AB 邊與BF 邊的夾角為β,BF邊與FG 邊交點的上升距離為H1,可得:
H1=l3sin(β-θ-△θ)-l3sin(β-θ)
設FG 邊與y 軸的初始角度為γ,變化角度為△γ;絲杠節點與F 點間上升距離為H2,得:
H2=l4cosγ-l4cos(γ+△γ)
故絲杠總的上升高度為:
Hmin=H1+H2=l3sin(β-θ-△θ)-l3sin(β-θ)+l4cosγ-l4cos(γ+△γ)
開合掌機構在通過懸垂線夾時,需要使行走輪底部與D 點距離大于障礙物的距離,設該距離為L,可得:
L=l2sinθ+0.5l1tan(β-θ)-r
經過計算后,得到了機器人相關參數。
2.3 滑臺機構的設計
滑臺機構,其主體為一個可以移動的控制箱,用于存放電源、控制器件、檢測設備等。控制箱可由滑軌來調整其位置,在機器人通過障礙物與爬坡時會適當地向前或向后運動,從而調整機器人的質心,使機械本體保持穩定。
本文用一個額外的驅動來控制滑臺機構移動,采用了撓性傳動的方式提供過載保護,使用雙繞線,完成對重物的拖動,其結構如圖5 所示。
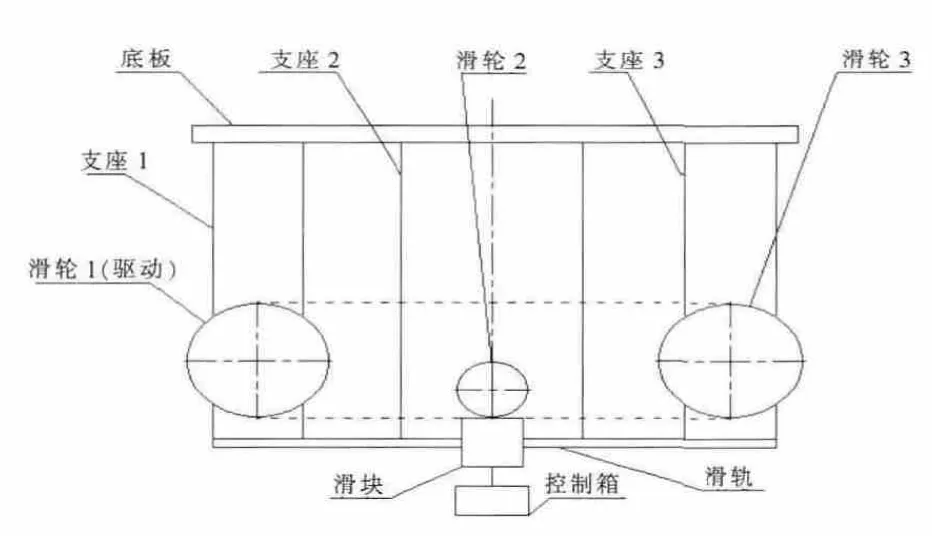
圖5 滑臺機構Fig.5 Centroid moving structrue
3 三維建模分析
在完成機構設計與參數計算后,本文在Pro/E 中對機械結構進行三維造型,建立了線上障礙物模型,并且將機器人與線上障礙物模型一同導入ADAMS 中進行仿真設計。在ADAMS 中虛擬仿真的主要目的是測試小車是否能順利通過線上的三種障礙物,并且在斜坡上行走。
3.1 開合掌機構仿真
本文在ADAMS 中建立了開合掌機構的模型,并且對其進行了仿真處理。本文建立了測量點到點類型的測量變量,測定前文所述L 的距離,以驗證開合掌機構張開時能否通過懸垂線夾。
從圖7 可以得知: 當該機構不開合時,允許通過190mm 的障礙物,當考慮到障礙實際尺寸時可能會略微減小;隨著開合的進行,其值逐漸減小,開合掌機構運動到極限時,最小距離時為123mm 左右,大于懸垂線夾的直徑,故機構設計合理。
本文又測試了絲杠驅動端的驅動力矩,以此選取了電機,絲桿驅動力矩如圖8 所示。
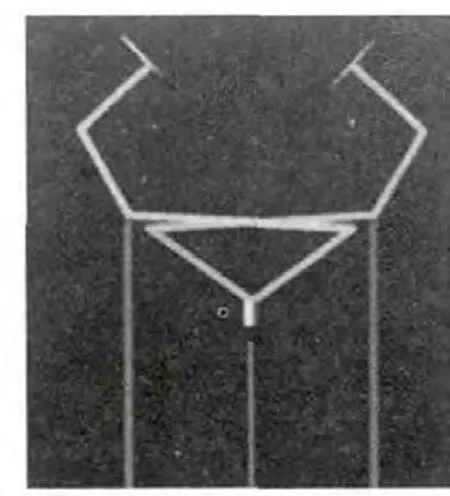
圖6 開合掌機構Fig.6 Opening and closing structure in ADAMS

圖7 距離曲線Fig.7 Distance curve
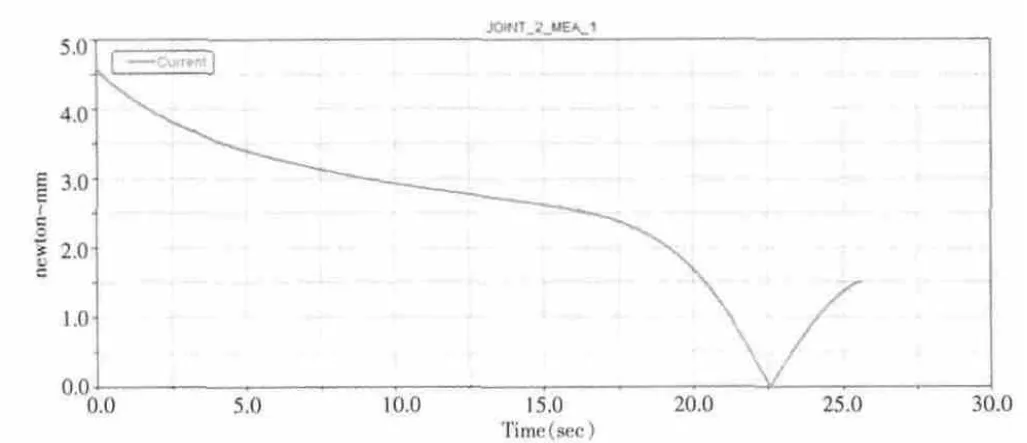
圖8 絲杠力矩曲線Fig.8 Torque curve of screw
3.2 通過障礙物仿真
本文先在ADAMS 中測試了機器人能否在開合掌機構的閉合狀態下,通過壓線管與防震錘。在完成測試后,本文在ADAMS 中重點對機構通過懸垂線夾進行了虛擬仿真。仿真結果表明,在經過懸垂線夾時,機器人可以保持兩臂不動,剩下的一臂通過調整開合掌機構的張開狀態,改變兩個行走輪之間的距離與角度,從而順利通過懸垂線夾。

圖9 機器人通過壓線管Fig.9 Moving across connection pipe

圖10 通過懸垂線夾Fig.10 Moving across suspension clamp
最后,本文在ADAMS中驗證了線上避障行走機器人能爬上坡度為15°的高壓線。
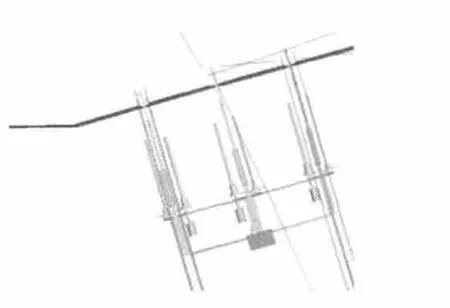
圖11 機器人在斜坡行進Fig.11 Moving on the slope
4 結束語
本文設計了一種高壓線巡檢機器人,對機器人的機械結構設計過程進行了闡述,建立了機器人的三維模型,并在ADAMS中對其進行了仿真設計。本文在ADAMS 中對機器人進行了測試,結果表明機器人不僅能夠穩定地通過線上的障礙物,而且可以爬上15°的斜坡。實物如圖12 所示,對加工出的經行測試表明,本文設計的機器人滿足設計要求,具有控制方便、行進穩定、機構可靠等特點。

圖12 實物圖Fig.12 The robot
[1] 孫翠蓮,王洪光,趙明揚,等.超高壓線巡檢機器人移動越障機構綜述[J].機械設計與制造,2006,10.
[2] 張廷羽.高壓線巡檢機器人動力學建模及分析[J].系統仿真學報,2008,18.
[3] 張廷羽.高壓線巡檢機器人的研究[D].上海:上海大學,2008.
[4] 任志斌.高壓輸電線巡檢機器人控制系統的研究與實現[D].上海:上海大學,2009.
[5] 杜娥.基于ADAMS 的巡檢機器人運動學、動力學仿真[D].武漢:武漢大學,2005.
[6] 孔志增.輸電線路巡檢機器人系統及控制軟件研究[D].北京:華北電力大學,2008.
[7] Alisson Fonseca,Ricardo Abdo,Jo?o Alberto. Robot for Inspection of Transmission Lines[C]. IEEE International Conference on Applied Robotics for the Power Industry,2012.
[8] S.Peungsungwal.B.Pungsiri.Autonomous Robot For A Powr Transmission Line Inspection[J].IEEE,2001.
[9] Jaka Katrasnik,Franjo Pernus,Bostjan Likar.New Robot for Power Line Inspection[J].IEEE,2008.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
