PSO動態(tài)優(yōu)化的ADRC控制器研究
2015-01-27 06:37:02張墩利周國棟
自動化與儀表 2015年9期
張墩利 ,周國棟 ,2,張 健
(1.湖南廣播電視大學 機電工程系,長沙410004;2.中南大學 機電工程學院,長沙 410083;3.國網(wǎng)天津城東供電公司,天津 300000)
目前,自抗擾控制器(ADRC)的參數(shù)都是線下靜態(tài)優(yōu)化,好處是計算速度快,并且能解決大部分工業(yè)系統(tǒng)帶來的干擾[1-2],但是在大時滯和強干擾系統(tǒng)中,如熱工系統(tǒng),靜態(tài)的參數(shù)往往會帶來輸出超調(diào)甚至不穩(wěn)定[3]。這時靜態(tài)參數(shù)機制的ADRC暴露出其局限性。
針對以上問題,本文提出動態(tài)優(yōu)化ADRC算法。該算法的核心思想是根據(jù)擾動量,動態(tài)調(diào)整擴張狀態(tài)觀測器(ESO)的誤差估計系數(shù)。
粒子群優(yōu)化算法(PSO)在多目標參數(shù)優(yōu)化中具有收斂速度快、計算效率高等特點,將用于ESO誤差系統(tǒng)的動態(tài)調(diào)整。
1 典型ADRC控制器及其改進研究
ADRC是一種新型非線性PID控制器。該控制器不需要被控對象的精確數(shù)學模型便可以實現(xiàn)高精度控制,具有響應速度快、抗干擾能力強、魯棒性強等優(yōu)點[4],因此具有很強的工業(yè)實用價值。在電力系統(tǒng)、機器人控制、電機控制、飛行控制等領(lǐng)域得到廣泛應用[5]。
典型的二階ADRC結(jié)構(gòu)如圖1所示,主要由3部分組成,分別是輸入跟蹤微分器(TD)、擴張狀態(tài)觀測器(ESO)和非線性反饋控制器(NLSEF)。

圖1 ADRC控制器結(jié)構(gòu)圖Fig.1 Diagram of ADRC regulator
其中,TD的作用是為輸入控制信號安排過渡過程并提取微分信號,其計算表達式為

式中:h0為濾波因子;r為跟蹤速度參數(shù)。
ESO是ADRC控制器的核心部件,其作用是估算出系統(tǒng)的內(nèi)外擾動總和,表達式為
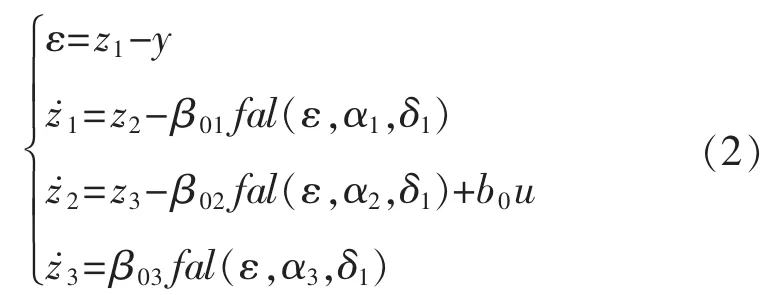
ESO估算的擾動量是否準確,決定于3個關(guān)鍵參數(shù) β01,β02和 β03。
NLSEF主要是根據(jù)輸入微分信號和ESO的狀態(tài)變量反饋值計算出輸出控制量,該計算律實際上是非線性PD控制算法。其表達式為

式中, fst()函數(shù)和 fal()函數(shù)參見文獻[4]。
由于ADRC控制器參數(shù)多,調(diào)節(jié)十分困難。近年來,對ADRC控制器優(yōu)化、改造的研究很多,出現(xiàn)了模糊ADRC[6]、混沌粒子群優(yōu)化ADRC[7]、免疫微粒群自抗擾控制[8]等。這些智能算法的引入大大提高了該控制器參數(shù)整定效率,擴展了其實用價值。但這些改進大都是采用靜態(tài)優(yōu)化機制,因此ESO的誤差估計范圍往往有限,一旦系統(tǒng)時滯嚴重或干擾跳動大,實際誤差超出設(shè)計范圍,系統(tǒng)將出現(xiàn)紊亂。這正是靜態(tài)估算機制暴露出的不足。
2 PSO動態(tài)優(yōu)化ADRC設(shè)計
2.1 PSO-ADRC結(jié)構(gòu)
粒子群優(yōu)化算法(PSO)是進化算法的一種[9-10],該算法的求解過程是從一組隨機初始解出發(fā),通過鄰域搜索計算方法,不斷迭代尋優(yōu),在每次迭代計算中,粒子群通過個體最優(yōu)解和群體最優(yōu)解不斷更新自己,直至找到最優(yōu)解。相比遺傳算法等進化算法,粒子群算法沒有交叉和變異運算,可采用實數(shù)編碼,結(jié)構(gòu)簡單,計算速度快,作為在線優(yōu)化的算法具有很大優(yōu)勢[11]。
采用PSO動態(tài)優(yōu)化的ADRC結(jié)構(gòu)如圖2所示。PSO嵌入在ESO前,其作用是優(yōu)化ESO的3個擾動量估計系數(shù)。
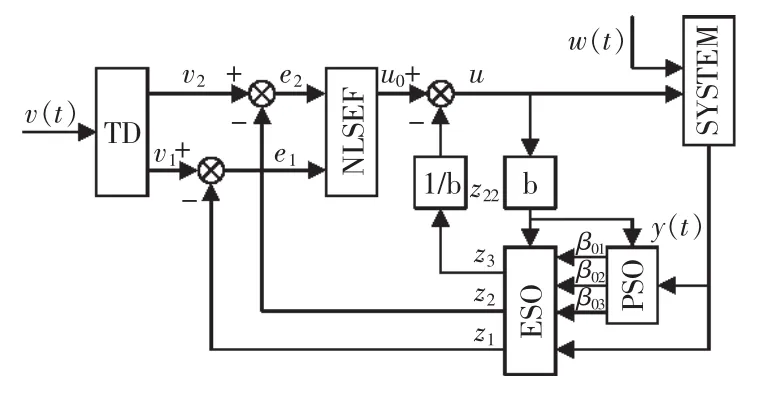
圖2 PSO-ADRC控制器結(jié)構(gòu)圖Fig.2 Structure of PSO-ADRC
動態(tài)優(yōu)化面臨的主要問題是實時性如何保證。為獲取最大的計算效率,做了2個方面的改進:因為ADRC自身有抗干擾能力,因此沒有必要每次都需要PSO在線優(yōu)化,只有滿足一定條件下才有必要進行優(yōu)化,本實驗中設(shè)置了一個誤差閾值,只有當誤差大于設(shè)定的閾值,PSO的在線優(yōu)化才會啟動;其次是PSO算法的時間復雜度本來就高,為滿足控制系統(tǒng)的實時性要求,有必要對現(xiàn)有PSO算法進行改進。
2.2 Pareto精英保留策略PSO
為提高計算效率,在經(jīng)典PSO算法基礎(chǔ)上采用了Pareto精英保留策略[12],該算法也稱非劣最優(yōu)求解,其運算流程如圖3所示。

圖3 PSO優(yōu)化流程Fig.3 Optimize process of PSO
Pareto-PSO方法是使用優(yōu)化前的ESO誤差系數(shù)作為初始值,不斷保留進化過程中的精英。為克服粒子群算法的早熟缺陷,對適應度函數(shù)加以改進,加入粒子的密集度和優(yōu)勢度參數(shù),其計算律為

式中:q為待優(yōu)化函數(shù)的維度;fkmax和 fkmin函數(shù)為第k 個待優(yōu)化函數(shù)的 2 個極值;f(i+1)k和 f(i-1)k為粒子的相鄰粒子的第k個待優(yōu)化函數(shù)值。

式中:p 為鄰域范圍;nd(i, j)為粒子優(yōu)勢計算值,當i粒子優(yōu)于j粒子時值為1,反之為0。
粒子群適應度函數(shù)計算律為

式中:ess、e(t)、Mp分別為穩(wěn)態(tài)誤差、反饋誤差和超調(diào)量;Kess、Ke、Kmp為相應系數(shù)。 優(yōu)化目標為使 J值取值最小。
3 仿真研究
仿真環(huán)境:計算機處理器為英特爾CORE i5 2.5 GHz,內(nèi)存 4 GB,WINDOWS7 操作系統(tǒng),采用MATLAB 9.0編寫算法程序。
實驗分別采用ADRC控制算法和本文提出的PSO-ADRC控制算法對典型時滯系統(tǒng)進行在線優(yōu)化,以文獻[3]中的熱工時滯系統(tǒng)為例,其傳遞函數(shù)為

式中,kp、Tp、τ為隨鍋爐運行工況不同而變化的參數(shù)。本實驗采用65%負荷狀態(tài),其參數(shù)kp=7.5,Tp=150,τ=45,α=12。
ADRC控制器參數(shù)值設(shè)置如表1所示。

表1 ADRC系統(tǒng)參數(shù)Tab.1 Parameters of ADRC
3.1 魯棒性能測試
當系統(tǒng)負荷從65%跳變到100%時,以上參數(shù)也隨之會產(chǎn)生攝動,系統(tǒng)分別采用ADRC控制器和PSO-ADRC(粒子群優(yōu)化自抗擾控制)控制器,其中PSO-ADRC控制器參數(shù)初始種群數(shù)為200,尋優(yōu)最大迭代次數(shù)為tmax=1000,PSO優(yōu)化啟動誤差閾值為4%,其階躍響應曲線分別如圖4所示,從圖中可以看出,ADRC控制器的輸出超調(diào)量為 20%,PSOADRC控制器的輸出超調(diào)量為14.7%,但系統(tǒng)調(diào)節(jié)時間比ADRC延長了64 s。
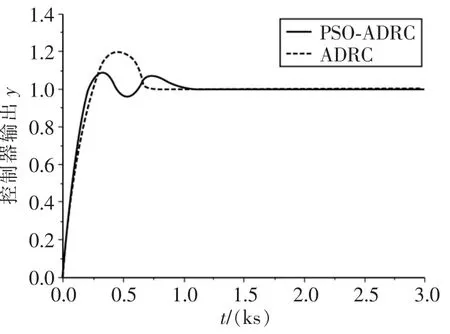
圖4 PSO-ADRC魯棒性仿真測試Fig.4 Robustness simulation tests of PSO-ADRC
3.2 抗干擾仿真測試
在輸入信號中加入一段大的擾動信號,其響應曲線如圖5所示,從圖中可以看出,超調(diào)量從18%減少到3%,但調(diào)節(jié)時間延長了32 s。
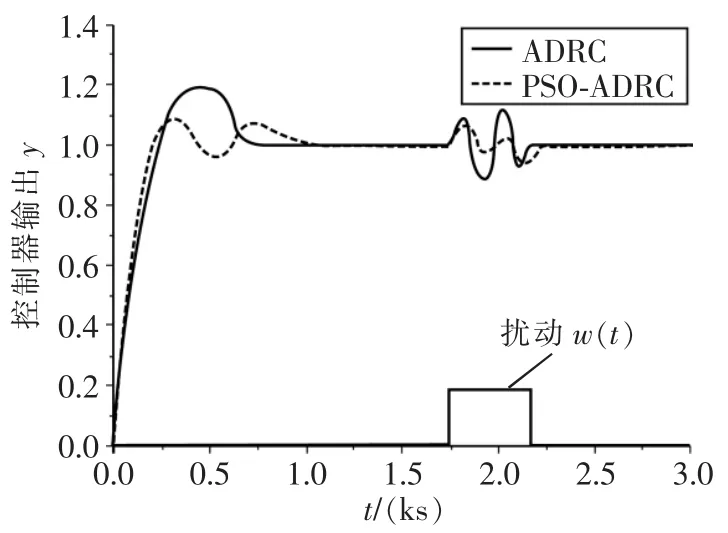
圖5 PSO-ADRC抗干擾仿真測試Fig.5 Anti-interference simulation test of PSO-ADRC
4 結(jié)語
本文根據(jù)ADRC控制器的特點,針對其在大時滯系統(tǒng)和強干擾系統(tǒng)控制中的不足,以動態(tài)調(diào)整其誤差估計系數(shù)的實時優(yōu)化為方案,采用改進的Pareto精英保留PSO算法進行實時快速優(yōu)化。針對熱工時滯系統(tǒng)的仿真實驗結(jié)果表明,對于大時滯和強干擾系統(tǒng)的控制具有很好的性能改善。
[1]潘文婷,孫運全,盛吉.基于粒子群的自抗擾靜止同步補償器仿真研究[J].計算機仿真,2011,28(8):298-301.
[2]楊瑞光,孫明瑋,陳增強.飛行器自抗擾姿態(tài)控制優(yōu)化與仿真研究[J].系統(tǒng)仿真學報,2010,22(11):2689-2693.
[3]管志敏.自抗擾控制器對一類熱工對象的控制性能研究[J].熱能動力工程,2011,26(4):445-448.
[4]韓京清.自抗擾控制技術(shù)-估計補償不確定因素的控制技術(shù)[M].北京:國防工業(yè)出版社,2008.
[5]劉昊,王濤,范偉,等.氣動人工肌肉關(guān)節(jié)的自抗擾控制[J].機器人,2011,33(4):461-466.
[6]宗陽,張科,王靖宇.一種基于模糊ADRC的舵機控制算法設(shè)計與實現(xiàn)[J].西北工業(yè)大學學報,2011,29(2):217-221.
[7]程啟明,程尹曼,汪明媚,等.基于混沌粒子群算法優(yōu)化的自抗擾控制在蒸汽發(fā)生器水位控制中的應用研究[J].華東電力,2011,39(6):311-314.
[8]劉朝華,張英杰,章兢,等.基于免疫雙態(tài)微粒群的混沌系統(tǒng)自抗擾控制[J].物理學報,2011,60(1):69-74.
[9]J Kennedy,R Eberbarl.Particle swarm optimization[C]//Proc IEEE Int Conf on Nerural Networks,Perth,1995:1942-1948.
[10]R Eberbarl,J Kennedy.A new optimizer using particle swarm theory[C]//Proc 6th Int Symposium on Micro.Machine and Human Science,Nagoya,1995:39-43.
[11]張海軍,岳恒,李春,等.基于PSO在線優(yōu)化的多模型自適應動態(tài)矩陣控制[J].系統(tǒng)仿真學報,2007,19(15):3506-3509.
[12]陳錦珠,郭文忠,陳國龍.求解VLSI布圖規(guī)劃問題的多目標粒子群優(yōu)化算法[J].計算機工程與科學,2010,32(9):57-60.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
