基于51單片機的三自由度氣動機械手控制系統(tǒng)的設(shè)計
2015-01-27 01:30:52陳林祥王正初
機電產(chǎn)品開發(fā)與創(chuàng)新
2015年1期
陳林祥,王正初
(臺州學(xué)院 機械工程學(xué)院,浙江 臺州 318000)
0 引言
機械手是在自動化生產(chǎn)過程中使用的一種具有抓取和移動工件功能的自動化裝置,是在機械化、自動化生產(chǎn)過程中發(fā)展起來的一種新型裝置。機械手是近些年發(fā)展起來的一種高端科技自動化生產(chǎn)設(shè)備,是工業(yè)機器人的一個重要分支。它的特點是可以通過編程來完成各種預(yù)期的作業(yè)任務(wù),在構(gòu)造和性能上兼有人和機器各自的優(yōu)點。機械手能代替人類完成危險、重復(fù)枯燥的工作,減輕人類勞動強度,提高勞動生產(chǎn)率。近年來,機械手已受到許多部門的重視,并越來越廣泛地得到應(yīng)用,特別在機械行業(yè)中它可用于零部件組裝,加工工件的搬運、裝卸等等。
1 3自由度氣動機械手結(jié)構(gòu)及其控制系統(tǒng)要求
3自由度氣動機械手機構(gòu)如圖1 所示。3 自由度分別是指機械手的順時針和逆時針旋轉(zhuǎn),機械手的水平伸縮,機械手的垂直運動,同時還能控制機械手手爪的張開和閉合。機械手旋轉(zhuǎn)是靠控制步進電機來來帶動,步進電機裝在基座上,機械手水平、垂直以及手爪的打開和閉合,是靠電磁閥控制氣缸來驅(qū)動。三個氣缸分別裝在機械手手臂水平位置、垂直位置以及手爪上。控制系統(tǒng)的基本要求為:能獨立控制各個關(guān)節(jié);具有示教功能,機械手能進行自動運行;步進電機速度可調(diào);系統(tǒng)分別采用本地控制和上下位機結(jié)構(gòu)形式的控制。
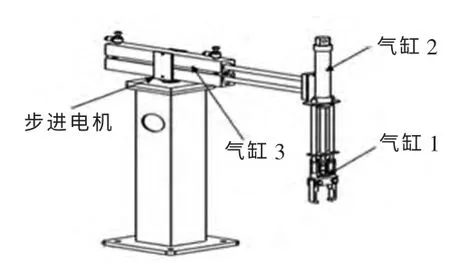
圖1 3 自由度氣動機械手結(jié)構(gòu)Fig.1 Structure of 3 degree freedom pneumatic robotic arm
2 控制系統(tǒng)硬件設(shè)計
本文設(shè)計了以stc89c52rc 單片機核心控制系統(tǒng)硬件電路,系統(tǒng)的硬件框圖和單片機IO 端口分配分別如圖2和表1 所示。……
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(shè)(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
環(huán)球時報(2017-03-30)2017-03-30 06:44:45
