塔吊群智能防碰撞系統(tǒng)研究
2015-01-28 08:14:30陳忠孝
電子設計工程 2015年19期
關(guān)鍵詞:系統(tǒng)
陳忠孝,張 盼,秦 剛,王 沛
(西安工業(yè)大學 陜西 西安 710021)
21世紀以來,各類建筑、橋梁工程的廣泛發(fā)展,塔式起重機作業(yè)的智能化已成為建筑施工中不可或缺的重要組成部分。塔式起重機的應用給現(xiàn)代化建設提供了很多方便,智能化與自動化在塔吊上面的應用也得以推廣。
塔吊群智能防撞系統(tǒng)是一種用于建筑或者橋梁工程,防止塔吊與塔吊、塔吊與其他障礙物體之間的碰撞,也能防止塔吊吊物侵入禁行區(qū)域的集成電子系統(tǒng)。對所有碰撞的可能和入侵非安全區(qū)域提供實時預警、遠程地面監(jiān)控、無線網(wǎng)絡傳輸?shù)榷喾N媒介表現(xiàn)形式的智能測控系統(tǒng)裝置,是現(xiàn)代城市建設建筑重型起重機的一種安全防護監(jiān)控設備。
1 智能防碰撞系統(tǒng)實施方案
塔吊防碰撞運算的目標是為了能夠使輸出模塊控制塔吊上各種電機的運行與停止。從而使塔吊吊臂、吊鉤和小車的能夠及時動作或者及時停止,防止塔吊司機的由于誤操作造成塔吊碰撞事故。防碰撞智能系統(tǒng)不斷采集實時數(shù)據(jù),然后不斷進行防碰撞運算,從而得出防碰撞結(jié)果,對輸出模塊的電機進行控制。在一群塔吊共同作業(yè)的工地上,區(qū)域中的每臺塔吊都安裝此監(jiān)控系統(tǒng)。首先,事先將塔吊的一些固定參數(shù)下載到每個監(jiān)控系統(tǒng)中儲存,比如塔吊的塔身高度,兩個塔吊之間的距離,吊臂的長度和平衡臂的長度等等。多臺塔吊的無線通訊數(shù)據(jù)包括了自身塔高,吊鉤的高度,小車的幅度和吊臂的旋轉(zhuǎn)角度,這些參數(shù)都是防碰撞運算所必須的參數(shù)。然而這些參數(shù)需要通過安裝在每臺塔吊上的傳感器測量得到[1-2]。 比如現(xiàn)場兩兩塔吊之間要實現(xiàn)防碰撞,需要知道相對位置關(guān)系以及兩塔吊之間的幾何尺寸信息,同時,還需要知道塔吊的實時動態(tài)信息,比如吊重物的高度,塔臂旋轉(zhuǎn)角度,小車變幅的距離等。
安裝在每臺塔吊傳動機構(gòu)上的編碼器模塊將本臺塔吊的塔臂回轉(zhuǎn)角度,小車變幅距離,吊鉤吊起重物的高度等信息經(jīng)過數(shù)據(jù)采集單元的信號調(diào)理電路、數(shù)字量化過程、光電隔離器,最后輸入主控制器。其他塔吊的實時狀態(tài)數(shù)據(jù)通過本臺塔吊安裝的無線通信模塊接收,并由相應接口輸入至主控制器。結(jié)合事先通過主控制器輸入設定的固定參數(shù),對塔吊群中的相關(guān)塔吊的運行狀態(tài)進行啟停警示判定。判斷的結(jié)果通過光電隔離器、繼電器控制轉(zhuǎn)化為相應電機的相應動作,比如電機的正轉(zhuǎn)反轉(zhuǎn)以及啟動停止等。這樣可以完成對塔吊群共同作業(yè)的安全保護工作。同時對塔吊群的實時狀態(tài)信息以及終端控制器的執(zhí)行動作在顯示屏上進行顯示,對于臨界碰撞風險及時進行聲光報警。塔吊群的實時狀態(tài)信息通過無線通信模塊輸入到總控制室的計算機中,地面工作人員也可以對塔吊群運行狀況進行地面監(jiān)測[3-4]。單臺塔吊的監(jiān)控裝置硬件框圖如圖1所示。
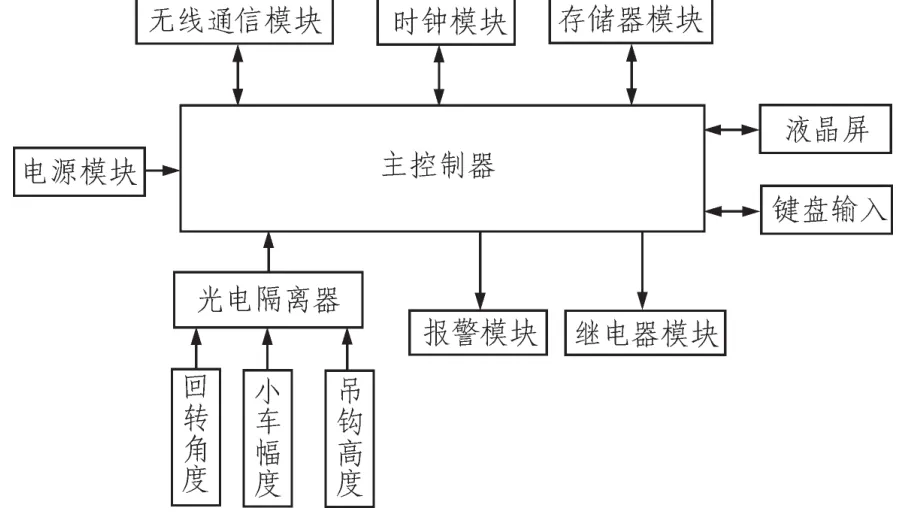
圖1 塔吊智能防碰撞系統(tǒng)硬件框圖Fig.1 Intelligent crane anti-collision system hardware block diagram
2 防碰撞的實現(xiàn)
塔吊如果有碰撞的可能,一般發(fā)生在塔吊與塔吊之間或者塔吊與障礙物之間。而塔吊與塔吊之間或者塔吊與障礙物之間的碰撞之間智能防撞系統(tǒng)運算的復雜程度,運算結(jié)果的準確度和防碰撞的全面性如何,關(guān)鍵取決于對塔吊碰撞情況的分析是否全面以及采用何種計算方法[5]。因此,每個塔吊監(jiān)控裝置必須實時監(jiān)控自己的狀態(tài),主控制器必須采集回來實時的數(shù)據(jù)。同時,同一個塔吊群中的所有塔吊必須進行實時通訊,獲取所有與自己相關(guān)的塔吊的運行狀態(tài),然后,將自身的運行狀態(tài)信息與相關(guān)塔吊進行防碰撞運算,當本臺塔吊與其他相鄰相關(guān)塔吊有碰撞可能時,控制系統(tǒng)將報警或者控制本臺塔吊電機的相關(guān)運動[6]。
2.1 塔吊之間的相互碰撞
接下來進行具體防碰撞分析,首先兩臺塔吊的位置有3種:本塔吊位置高于另一塔吊;本塔吊位置低于另一塔吊;本塔吊與相關(guān)塔吊處于同一高度。
1)當兩臺塔吊處于高度不同的位置時,有3種碰撞可能:①處于高位塔吊的吊繩與低位塔吊的吊臂發(fā)生碰撞;②處于高位塔吊的吊繩與低位塔吊的平衡臂發(fā)生碰撞;③處于高位塔吊的塔身與低位塔吊的吊臂發(fā)生碰撞。前兩種情況可視為一種情況。下來對這幾種情況進行詳細分析:
(a)高位塔吊的吊繩與低位塔吊的吊臂(前臂)發(fā)生碰撞
如圖2所示,其中TD1所處的位置高于TD2所處位置,S1,BF1,H1分別為TD1的轉(zhuǎn)角,變幅幅度,以及吊鉤高度,S2為TD2的旋轉(zhuǎn)角度,D21分別為TD2的前臂長,H21,H22分別為TD2的塔臂高度,頂尖高度。
如圖所示,塔吊TD1的吊繩與塔吊TD2的前臂發(fā)生碰撞必須符合以下條件:
(Ⅰ)兩臺塔吊的同時轉(zhuǎn)到上圖所示陰影區(qū)域。
(Ⅱ)TD1的吊繩高度必須小于TD2塔臂高度。
(Ⅲ)TD1的小車變幅距離與TD2的前臂長的和小于兩塔吊塔身之間的距離。
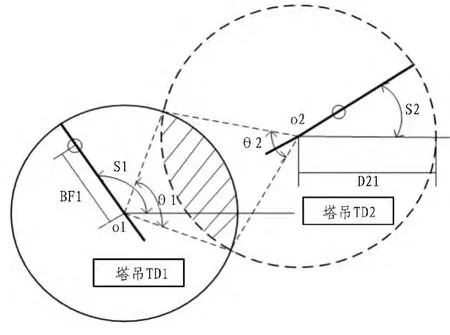
圖2 高位塔吊的吊繩與低位塔吊的前臂發(fā)生碰撞Fig.2 High crane slings and lower forearm collision
(Ⅳ)TD1吊繩到TD2前臂的距離比設置的安全距離小,下圖給出了防碰撞計算流程圖:
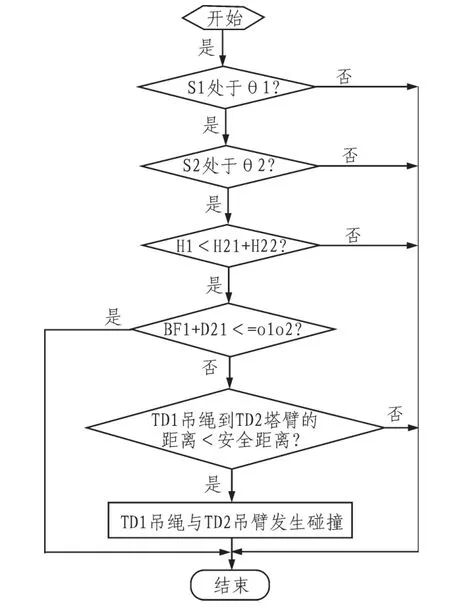
圖3 防碰撞流程圖Fig.3 Anti-collision flowchart
(b)高位塔吊的吊繩與低位塔吊的平衡臂(后臂)發(fā)生碰撞與情況a類似,此處不再說明。
(c)高位塔吊的塔身與低位塔吊的吊臂(前臂)發(fā)生碰撞
當處于低位的塔吊TD2的前臂長大于兩塔吊塔身之間的距離,并且處于低位的塔吊的前臂轉(zhuǎn)到靠近處于高位的塔吊的塔身則會發(fā)生碰撞,即TD2的轉(zhuǎn)角S2在θ角附近,則TD2的吊臂可能與TD1的塔身相碰撞。如圖4所示。
2)兩塔吊處于高度相同的位置時
若兩塔吊處于高度相同的位置,可能發(fā)生的情況只有兩臺塔吊前臂與前臂的碰撞或者后臂與前臂的碰撞兩種。如圖5所示,TD1與TD2滿足以下條件會發(fā)生碰撞:①兩塔吊同時轉(zhuǎn)圖中陰影區(qū);②TD1的前臂頂端到TD2的前臂頂端的距離小于安全距離,或者TD2的前臂頂端到TD1的前臂的距離小于安全距離。防碰撞計算方法與前述類似,在此不再詳細說明。
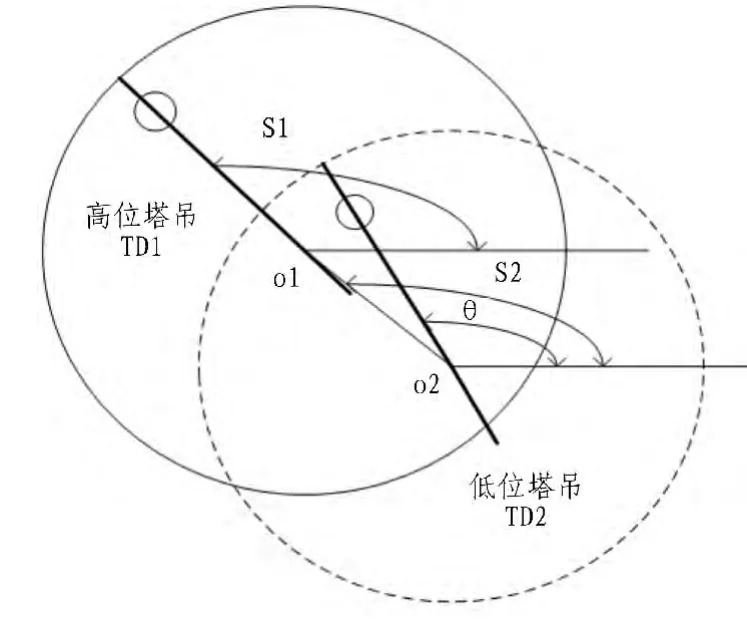
圖4 高位塔吊的塔身與低位塔吊的吊臂(前臂)發(fā)生碰撞Fig.4 High crane column and lower forearm collision
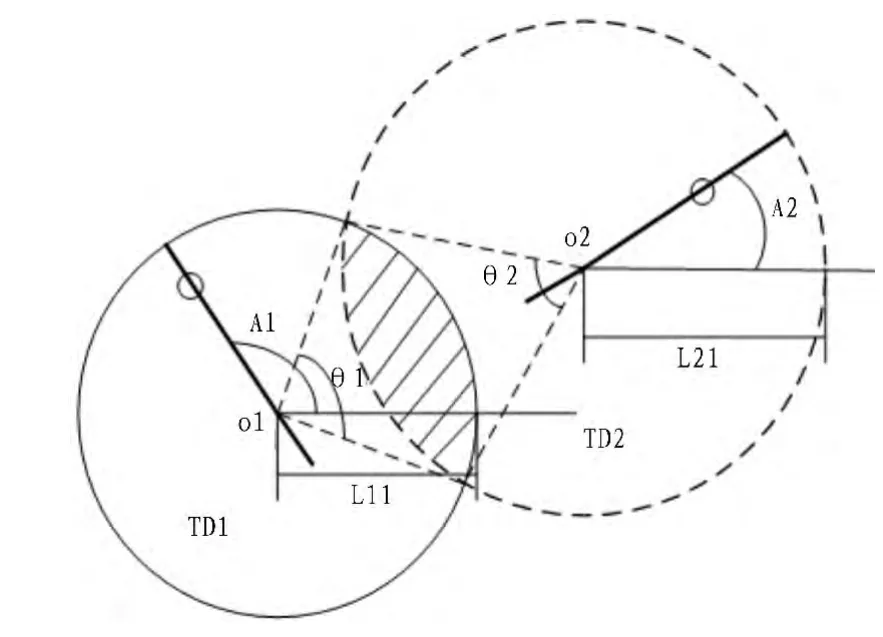
圖5 兩塔吊處于高度相同的位置Fig.5 Two cranes at the same height position
2.2 塔吊與障礙物的碰撞
塔吊與障礙物之間的碰撞主要存在于吊鉤或者吊臂與障礙物的碰撞之間。
當塔吊的高度小于障礙物時高度時,存在吊臂與障礙物碰撞的可能性,需判斷塔吊的位置,這時將障礙物視作多邊形,如圖6所示,障礙物ABCDE,塔吊吊臂只要不在∠OBD所在扇形范圍內(nèi),則不會存在塔吊與障礙物碰撞的可能。
當塔吊的高度比障礙物的高度高時,存在吊鉤與障礙物碰撞的可能,需判斷吊鉤與障礙物的高度。如果吊鉤比障礙物高,則禁止吊鉤在ABCDE區(qū)域內(nèi)下降,如果吊鉤比障礙物低,則禁止吊鉤下放,進入ABCDE區(qū)域內(nèi)。
3 數(shù)據(jù)采集模塊
在塔吊的3臺主要的電機傳動系統(tǒng)中,通過電機帶動齒輪使塔吊的吊臂轉(zhuǎn)動,小車前進后退、吊鉤提升下放等功能。為了采集吊臂回轉(zhuǎn)的角度、小車位移、吊鉤高度等參數(shù),必須要能實時檢測到齒輪的旋轉(zhuǎn)方向以及齒輪轉(zhuǎn)速與小車位移、回轉(zhuǎn)角度的關(guān)系。在塔吊智能防碰撞系統(tǒng)中必須實時監(jiān)測塔吊運行狀態(tài),塔吊在運行過程中的電機是高速運轉(zhuǎn)的,因此,數(shù)據(jù)采集的速度必須要非常快,這樣才能做到實時性。
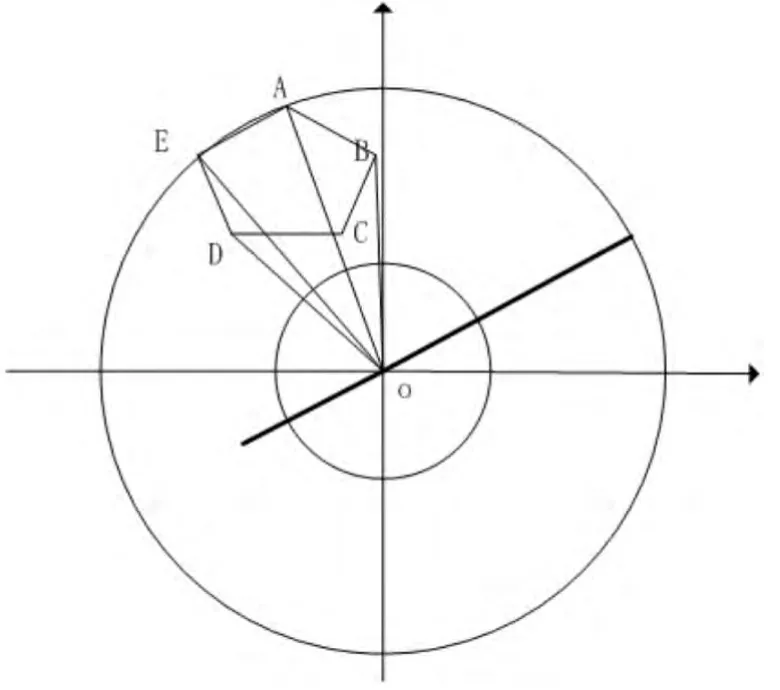
圖6 塔吊與障礙物的碰撞Fig.6 Crane collidewith an obstacle
對于所需數(shù)據(jù)的采集,目前常用的傳感器是光電編碼器。光電編碼器又分為增量式光電編碼器和絕對式光電編碼器。
增量式光電編碼器有一個中心有軸的光電碼盤,其上有環(huán)形通,暗的刻線,還有一個光電發(fā)射器和一個光電接收器分布在光電碼盤的兩側(cè),當光電碼盤每旋轉(zhuǎn)單位的角度時,光電接收器就會收到一個脈沖信號,如果以一個參考點計數(shù)脈沖,便可得到旋轉(zhuǎn)的角度[7]。
絕對式光電編碼器也有一個上面有著環(huán)形通、暗刻線的光電碼盤,但其上面的刻線以2線、4線、16線…n線排列,稱為n位絕對式光電編碼器,通過讀取每道刻線可獲得2的零次方到2的n-1次方的唯一的二進制編碼。這種編碼器由于每個位置的編碼都是唯一的二進制編碼。這種編碼器由于每個位置的編碼都是唯一的,所有無需斷電前記憶角度位置,重新上電后直接讀取當前的角度即可,且中間一直不用計數(shù),計數(shù)結(jié)果只跟停止位置有關(guān)。如圖7為增量式光電編碼器輸出波形:
增量式編碼器是一種測量電機轉(zhuǎn)速和轉(zhuǎn)向的常用傳感器器件,它的特點是分辨率高、響應速度快并且輸出信號穩(wěn)定。增量式編碼器發(fā)出的2路脈沖是正交的,也就是2路脈沖為相位差為90度的方波。系統(tǒng)通過判斷2路脈沖的相位關(guān)系,就可以獲得電機的旋轉(zhuǎn)方向。
本系統(tǒng)設計中采樣頻率為500 Hz,每2ms產(chǎn)生1個定時中斷。由于系統(tǒng)的時鐘節(jié)拍已經(jīng)設置為1ms采集1次,為了不使頻繁的定時器中斷影響系統(tǒng)任
務的正常運行,因此設置相當于2個時鐘節(jié)拍的定時中斷。因為使用此采樣率,所有系統(tǒng)所使用的編碼器線速必須小于 125 Hz。
整個的數(shù)據(jù)采集過程由定時器中斷服務子程序和數(shù)據(jù)采集系統(tǒng)共同完成。
4 系統(tǒng)的軟件設計
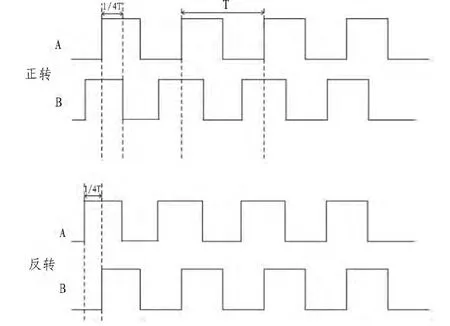
圖7 增量式編碼器輸出波形Fig.7 Incremental encoder outputwaveform
為了縮短開發(fā)周期,降低開發(fā)難度,本系統(tǒng)軟件采用C語言編寫。系統(tǒng)采用了實時動態(tài)位置計算技術(shù),本系統(tǒng)軟件功能分為兩大部分,預設參數(shù)部分和工作狀態(tài)部分。圖8給出了系統(tǒng)軟件總體功能模塊圖[8]。
本系統(tǒng)的軟件抗干擾技術(shù)主要內(nèi)容包括兩個方面:一方面是是采取軟件方法抑制疊加在模擬輸入信號中的噪聲影響,比如數(shù)字濾波技術(shù);另一方面,當由于干擾使得整個控制系統(tǒng)運行發(fā)生混亂,程序跑飛或者進入死循環(huán)時,采取強制措施,使程序正常運行,比如“看門狗”技術(shù)。看門狗技術(shù)也稱程序運行監(jiān)視程序,它可以由硬件實現(xiàn),也可以用軟件實現(xiàn),還可以用軟硬結(jié)合的方式實現(xiàn),本系統(tǒng)采用軟件實現(xiàn)。程序運行監(jiān)視程序不應該太大,否則,會使系統(tǒng)過于復雜,這樣就會會降低系統(tǒng)的可靠性。
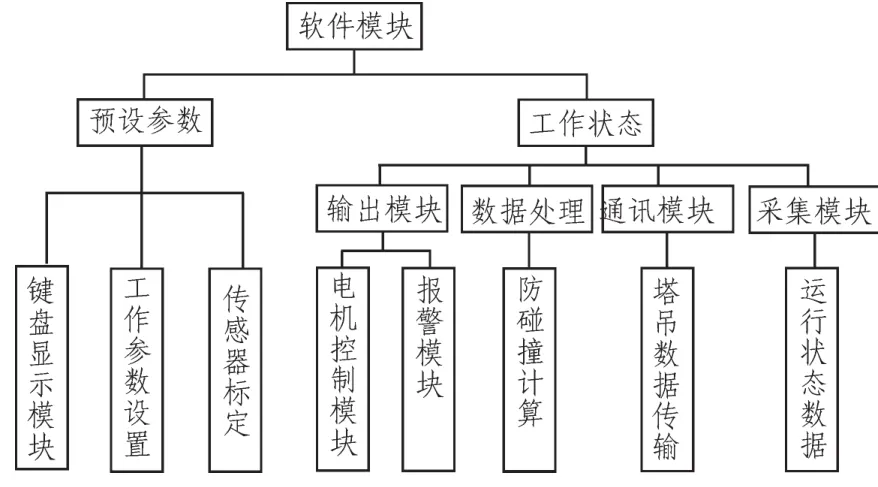
圖8 系統(tǒng)軟件功能模塊圖Fig.8 System software function block diagram
塔吊群防碰撞系統(tǒng)對實時性要求較高,根據(jù)單臺塔吊智能控制系統(tǒng)的功能和時序關(guān)系以及實時性要求,本文采用并行處理思想,將系統(tǒng)工作狀態(tài)下的軟件分為兩個主要流程:1)通訊流程;2)數(shù)據(jù)采集與處理流程。其中,通訊流程主要負責本塔吊與其他塔吊信息的交互;數(shù)據(jù)采集與處理流程主要負責采樣數(shù)據(jù)、防碰撞計算以及控制輸出等。
本軟件設計采用模塊化編程的思想,每個功能模塊完成相對獨立的功能,模塊與模塊之間定義標準統(tǒng)一的接口規(guī)范,保證了各個模塊獨立開發(fā),獨立維護。用戶也可以根據(jù)自己的需求選擇其中某些功能模塊,也有利于軟件的后續(xù)開發(fā)。
5 結(jié)束語
本系統(tǒng)建立了一套塔吊群防碰撞控制系統(tǒng),對工地特定區(qū)域內(nèi)的多臺塔吊進行防碰撞報警以及保護,滿足了復雜環(huán)境下塔群的防碰撞要求,幫助塔吊操作員避免那些由于操作失誤造成的嚴重甚至致命的事故,為建筑工地提供更為安全的施工環(huán)境。
[1]賈永峰.塔式起重機多源信息監(jiān)控系統(tǒng)研究 [D].西安:西安建筑科技大學,2005.
[2]呂鈞星,吳榮光,呂俊輝.塔吊防互撞系統(tǒng)[J].三峽大學學報自然科學版,2004,24(2):118-120.LV Jun-xing,WU Rong-guang,LV Jun-hui.Crane anti-collision system[J].Three Gorges University Natural Science,2004,24(2):118-120.
[3]門長根.塔機常見事故的分析與預防[J].建筑安全,2002(8):18-19.MEN Chang-gen.Analysis and prevention of common tower crane accident[J].Construction Safety,2002(8):18-19.
[4]謝建民.亡羊補牢—塔吊重大事故預防 [J].安全與健康(上),2002(7):19-21.XIE Jian-min.Remedy-tower crane major accident prevention[J].Safety and Health (top),2002(7):19-21.
[5]高志軍,顏國正,丁國清.多 Agent協(xié)作環(huán)境下的任務分配[J].系統(tǒng)工程與電子技術(shù),2005,27(1):134-136.GAO Zhi-jun,YAN Guo-zheng,DING Guo-aing.Multi-agent collaborative environment task allocation[J].Systems Engineering and Electronics Technology Surgery,2005,27 (1):134-136.
[6]黃敏.基于多Agent的電力遠動信息實時傳輸?shù)难芯縖D].北京:華北電力大學,2005.
[7]陳宗海,詹昌輝.基于感知、行為0的智能模擬技術(shù)的現(xiàn)狀及展望[J].機器人,2001,23(2):187-193.CHEN Zong-hai,ZHAN Chang-hui.Based on the current situation perception,behavior intelligent simulation technology and prospect0[J].Robots,2001,23(2):187-193.
[8]三一重工股份有限公司.塔式起重機運行監(jiān)控裝置中國,02283215[P].2003-12-17.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32