拉格朗日導(dǎo)航系統(tǒng)評估技術(shù)研究及測試平臺實現(xiàn)
2015-01-28 08:14:42葉麗莎朱程廣
電子設(shè)計工程 2015年19期
葉麗莎,朱程廣
(上海交通大學(xué) 上海 200240)
拉格朗日衛(wèi)星導(dǎo)航系統(tǒng)是基于天體拉格朗日點的衛(wèi)星導(dǎo)航系統(tǒng),本文的拉格朗日點是指地月系拉格朗日點,其衛(wèi)星主要分布于地月系L1、L2、L4和L5的衛(wèi)星軌道上,目的是對地月系和火星區(qū)域的空間探測器進行導(dǎo)航定位。導(dǎo)航系統(tǒng)的建設(shè)和測試評估總是齊頭并進的。一方面,測試評估可以驗證系統(tǒng)的功能和性能是否達到設(shè)計的預(yù)期要求;另一方面可以對系統(tǒng)的工作狀態(tài)進行監(jiān)測,為系統(tǒng)后續(xù)發(fā)展提供改善或增強系統(tǒng)性能的依據(jù)[1]。拉格朗日導(dǎo)航系統(tǒng)目前正處于設(shè)計階段,尚無系統(tǒng)化的評估體系可直接用于驗證該導(dǎo)航系統(tǒng)能否滿足導(dǎo)航定位的精度需求。
由于拉格朗日導(dǎo)航系統(tǒng)與GNSS系統(tǒng)都是衛(wèi)星導(dǎo)航系統(tǒng),所以有不少可以借鑒的地方,但有幾個不同點需要特別注意:第一,系統(tǒng)信號覆蓋范圍大;第二,定位解算GDOP因子差別大;第三,導(dǎo)航衛(wèi)星時鐘同步較難;第四,導(dǎo)航衛(wèi)星控制精度不高。所以,本文就該導(dǎo)航系統(tǒng)的特點,將整個測試評估體系分為系統(tǒng)層面和信號層面,針對幾個重要性能指標(biāo)的評估技術(shù)進行研究,設(shè)計測試評估體系架構(gòu),并通過測試平臺的搭建和具體模塊的實現(xiàn),利用計算機仿真技術(shù)對拉格朗日導(dǎo)航系統(tǒng)進行仿真實驗。
1 拉格朗日導(dǎo)航系統(tǒng)測試評估技術(shù)
拉格朗日導(dǎo)航系統(tǒng)測試評估技術(shù)主要解決導(dǎo)航系統(tǒng)星座配置、導(dǎo)航信號體制對導(dǎo)航性能的影響,以及信號接收、導(dǎo)航定位解算等的評估。根據(jù)評估指標(biāo)的屬性,把整個評估體系分為導(dǎo)航系統(tǒng)層面和信號處理層面兩個部分。
1.1 系統(tǒng)級測試評估技術(shù)
拉格朗日導(dǎo)航系統(tǒng)的評估與GNSS的不同,因為尚處于設(shè)計階段,而且要滿足地月系及火星區(qū)域內(nèi)探測器的深空導(dǎo)航要求,因此要先考察該導(dǎo)航系統(tǒng)能否宏觀上滿足深空導(dǎo)航的要求。文中主要使用網(wǎng)格法,對空間區(qū)域進行網(wǎng)格化分割,通過設(shè)定性能指標(biāo),對系統(tǒng)的導(dǎo)航性能及遠近效應(yīng)等進行評估。
1)導(dǎo)航性能評估
對地月系區(qū)域(或火星區(qū)域)進行網(wǎng)格化,形成在地心慣性系下的坐標(biāo)。針對每個網(wǎng)格點Xpj,若假設(shè)m顆導(dǎo)航站位置為Xi,則m顆衛(wèi)星相對網(wǎng)格點的單位矢量為:

有測量矩陣:

令
Aj=HTHjj
對角化有,

式中,U,V 為正交矩陣,D=diag[λi],i=1,2, …,m 且 λ1>λ2>…λm。
則評估點性能指標(biāo):

統(tǒng)計 Jj,把 Jj分成幾個等級,如<10、<100等等。若Jj較大的區(qū)域多,則系統(tǒng)性能較差。
由于深空中軌道運行較為光滑,因此,在評估中可以考慮動力學(xué)特性,如若狀態(tài)轉(zhuǎn)移矩陣為:

考慮一段時間Δt,則有,

同樣,對角化有,

式中,U,V 為正交矩陣,D=diag[λi],i=1,2,…,m,且 λ1>λ2>…λm。
則評估點性能指標(biāo):

這樣,系統(tǒng)性能評估更加準(zhǔn)確,其性能有大幅度提高。
2)遠近效應(yīng)評估
拉格朗日導(dǎo)航系統(tǒng)信號遠近效應(yīng)的評估方法,同樣針對每個網(wǎng)格點,若假設(shè)m顆導(dǎo)航站位置為Xi,則m顆衛(wèi)星相對網(wǎng)格點距離為:

計算信號傳播衰減:
統(tǒng)計遠近效應(yīng)<20 dB、<40 dB、<60 dB…區(qū)域,若遠近效應(yīng)較大,則系統(tǒng)性能不佳。
根據(jù)測距碼體制計算增益,設(shè)為B,
其中,Rτ,Rr分別為自相關(guān)與相相關(guān)。
判斷B+Ld<0
把B+Ld<0區(qū)域統(tǒng)計,若區(qū)域較大,則系統(tǒng)性能較差。
1.2 信號級測試評估技術(shù)
導(dǎo)航信號質(zhì)量的好壞,直接關(guān)系到衛(wèi)星導(dǎo)航系統(tǒng)的整體性能。信號質(zhì)量評估可以為衛(wèi)星導(dǎo)航系統(tǒng)的信號設(shè)計及關(guān)鍵技術(shù)在軌試驗驗證提供手段及支撐[2],對于優(yōu)化衛(wèi)星導(dǎo)航系統(tǒng)性能起著重要的作用。在公開發(fā)表的文獻及學(xué)位論文中,主要討論民用信號的性能[3-4],且主要集中于精度、抗多徑和兼容性方面[5-6],以及抗干擾能力[7]。由于拉格朗日導(dǎo)航系統(tǒng)的衛(wèi)星和接收機都分布在太空,與一般的GNSS不同,故多徑誤差,抗干擾和兼容性等方面要求并非本文討論的重點。因此,針對拉格朗日導(dǎo)航系統(tǒng)的特點,本文主要針對信號衰減、遠近效應(yīng)抑制性能、功率譜分析以及導(dǎo)航定位精度等對導(dǎo)航信號的性能進行評估。
1)信號衰減
空間導(dǎo)航信號的正確與否及性能優(yōu)劣,直接關(guān)系到系統(tǒng)PVT基本功能、關(guān)鍵性能和指標(biāo)的實現(xiàn)[8]。由于需要對地月系及火星區(qū)域進行導(dǎo)航定位,衛(wèi)星信號傳播距離較遠,信號強度衰減較大,會對信號的誤碼率與測距正確率產(chǎn)生較大的影響,因此要對信號衰減程度進行評估。本文主要根據(jù)Friis公式計算得到接收信號強度指示值。
2)遠近效應(yīng)抑制性能
這里主要從信號體制角度評估導(dǎo)航系統(tǒng)的遠近效應(yīng)抑制性能。根據(jù)測距信號的發(fā)射體制,以及測距碼的自相關(guān)與互相關(guān)比值,確定測距信號抑制互相關(guān)干擾大小Gd;根據(jù)地月系導(dǎo)航系統(tǒng)的布局以及信號發(fā)射參數(shù)計算測試點的遠近效應(yīng)大小Gy,判斷是否有:

3)功率譜分析
利用Welch法對拉格朗日導(dǎo)航系統(tǒng)信號進行譜分析,采用信號分段重疊、加窗、FFT等技術(shù)來計算功率譜。由于導(dǎo)航系統(tǒng)的性能好壞在一定程度上取決于測距碼的相關(guān)函數(shù),其相關(guān)函數(shù)旁瓣的峰值最大值可以來表示系統(tǒng)最壞情況下的性能。
4)定位精度計算
采用卡爾曼濾波算法對衛(wèi)星信號進行定位解算。卡爾曼濾波是解決以均方差最小為準(zhǔn)則的最佳線性濾波問題,根據(jù)前一個估計值和最近一個觀察數(shù)據(jù)來估計信號的當(dāng)前值。用狀態(tài)方程和遞推方法進行估計,不需要知道全部過去的數(shù)據(jù)。
2 拉格朗日導(dǎo)航系統(tǒng)測試平臺設(shè)計
拉格朗日導(dǎo)航測試平臺主要分為導(dǎo)航系統(tǒng)配置與顯示、導(dǎo)航系統(tǒng)評估、信號模擬器和信號接收測試等模,并通過局域網(wǎng)聯(lián)接各模塊,根據(jù)實際需要,合理選用TCP和UDP兩種協(xié)議實現(xiàn)模塊間的通訊。其總體架構(gòu)如圖1所示。
2.1 系統(tǒng)層面性能評估
系統(tǒng)層面的評估主要是針對拉格朗日導(dǎo)航系統(tǒng)的不同軌道、星座配置、導(dǎo)航系統(tǒng)精度性能、以及導(dǎo)航信號的遠近效應(yīng)等進行評估。其結(jié)構(gòu)如圖2所示。
2.2 信號層面的測試評估
拉格朗日導(dǎo)航系統(tǒng)的衛(wèi)星信號處理過程與一般的GNSS導(dǎo)航系統(tǒng)相似,衛(wèi)星信號經(jīng)空間傳播后被接收機天線接收,然后通過射頻前端濾波放大、下變頻、采樣及量化處理后,轉(zhuǎn)換為數(shù)字中頻信號進行后續(xù)的信號處理過程。文中所使用的衛(wèi)星仿真信號為數(shù)字中頻信號,為了能更加真實地模擬深空中的衛(wèi)星信號,在生成信號的過程中,不僅考慮了信號頻率、時延、衰減等因素,加之拉格朗日導(dǎo)航系統(tǒng)中衛(wèi)星和探測器有相對運動且速度較快,故還添加了多普勒頻移。信號模擬器主要包括衛(wèi)星軌道和空間探測器軌道的繪制,參數(shù)設(shè)置,信號生成等功能模塊。其結(jié)構(gòu)流程如圖3所示。

圖1 拉格朗日導(dǎo)航測試平臺體系架構(gòu)圖Fig.1 Structure diagram of Lagrange satellite navigation evaluation platform
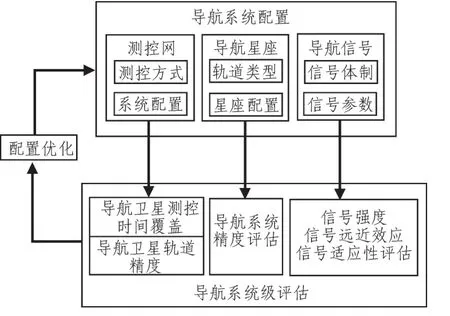
圖2 拉格朗日導(dǎo)航系統(tǒng)級評估結(jié)構(gòu)圖Fig.2 Structure diagram of lagrange satellite navigation evaluation system

圖3 拉格朗日導(dǎo)航系統(tǒng)信號模擬器Fig.3 Signal simulator of Lagrange satellite navigation system
信號模擬器產(chǎn)生數(shù)字中頻信號后,就可以利用信號接收測試平臺,對信號進行接收性能測試。對于信號接收性能測試而言,主要測試?yán)窭嗜諏?dǎo)航信號的捕獲、跟蹤、以及解調(diào)等影響導(dǎo)航精度方面性能。
信號接收層面的測試主要考慮導(dǎo)航信號接收性能測試(包括信號捕獲、跟蹤性能等),以及信號測量方面性能測試(主要測試一定導(dǎo)航信號體制下的偽距、偽距率的測量性能),其結(jié)構(gòu)圖如圖4所示。
信號測試平臺的作用有兩個:
第一,測試?yán)窭嗜諏?dǎo)航系統(tǒng)的信號性能。在測試平臺上集成一定的算法庫,調(diào)用這些算法來對導(dǎo)航信號的不同性能指標(biāo)進行評估。同時檢測拉格朗日導(dǎo)航系統(tǒng)的導(dǎo)航模式是否有效,能否滿足導(dǎo)航精度需求。因此,設(shè)置控制/調(diào)度模塊可以對信號的參數(shù)進行調(diào)整。

圖4 信號接收測試平臺Fig.4 Signal reception test platform
第二,測試?yán)窭嗜諏?dǎo)航接收模塊性能。通過測試?yán)窭嗜諏?dǎo)航信號接收算法,為下一階段的導(dǎo)航接收機研制提供檢測平臺。
3 測試平臺的實現(xiàn)與仿真結(jié)果
3.1 主控界面
主控制界面的功能主要包括:主機信息顯示:用戶名、IP地址、UTC時間;菜單欄,包括文件、視圖、編輯和幫助菜單;終端列表;參數(shù)設(shè)置;參數(shù)傳輸;終端間互相通信。
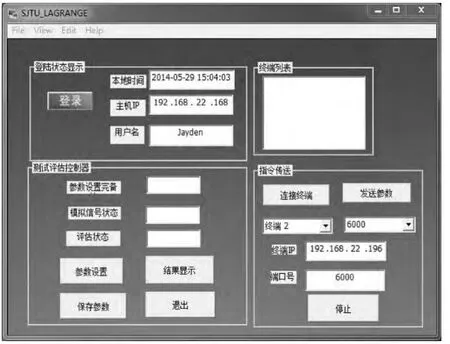
圖5 主控制界面Fig.5 The interface ofmain control
主控界面可針對不同的終端,發(fā)送不同的參數(shù),主要包括衛(wèi)星軌道參數(shù)、衛(wèi)星信號體制參數(shù)和總體性能評估顯示參數(shù)等。
3.2 軌道生成及繪制模塊
軌道生成及繪制模塊的功能是根據(jù)已有的軌道方程,輸入初始和結(jié)束時間,生成并繪制出地月系(或火星附近)探測器的軌道、拉格朗日導(dǎo)航系統(tǒng)衛(wèi)星的軌道以及地球高軌衛(wèi)星的軌道。
這里用了幾種不同的算法進行軌道生成,并通過對軌道的起始點和終點的偏差計算,最終選取最優(yōu)的算法進行軌道生成。
3.3 模擬信號產(chǎn)生模塊

圖6 軌道生成與繪制模塊Fig.6 Track generation and renderingmodule
根據(jù)已有的衛(wèi)星軌道以及衛(wèi)星參數(shù),對偽距,導(dǎo)航電文等進行信號調(diào)制,將生成的模擬信號發(fā)送給測試平臺。此外,該模塊還可將模擬信號狀態(tài)及信號同步信息反饋到主控模塊。模擬信號是由載波和導(dǎo)航電文調(diào)制獲得的,信號的格式為信號前8位為衛(wèi)星編號,尾部16位為校驗位,用來檢測數(shù)據(jù)是否正確。在產(chǎn)生模擬信號的時候,可以設(shè)置不同的碼速率和不同的多普勒頻偏。
3.4 測試評估模塊
產(chǎn)生的模擬信號,在評估終端接收到后,經(jīng)過參數(shù)設(shè)置和評估后,經(jīng)評估結(jié)果發(fā)送給顯示終端。結(jié)果顯示的實時性和準(zhǔn)確性對評估系統(tǒng)的可靠性具有重要意義。評估顯示分為系統(tǒng)級導(dǎo)航性能評估、測試級導(dǎo)航性能評估、導(dǎo)航終端算法評估和導(dǎo)航衛(wèi)星測控性能評估等模塊。
對導(dǎo)航系統(tǒng)及模擬信號進行性能評估,以圖表形式實時顯示評估結(jié)果,并可實時顯示系統(tǒng)的工作內(nèi)容及步驟,讓用戶更直觀地了解系統(tǒng)的工作狀態(tài)。
對于相同的火星探測器軌道,不同星座構(gòu)型下信號衰減仿真結(jié)果,以構(gòu)型Halo-VP-VP為例:
對于信號的功率譜分析,當(dāng)碼長為255,碼速率為1.023*10^6,不添加多普勒頻偏的評估結(jié)果如圖8所示。
最后,通過卡爾曼濾波算法對衛(wèi)星模擬信號的定位解算,得到當(dāng)加入偏差為100 m時,在地月系區(qū)域內(nèi)的導(dǎo)航位置與速度精度分別在100m、0.5 m/s以內(nèi);在火星附近區(qū)域位置誤差<3 km的導(dǎo)航精度,達到拉格朗日導(dǎo)航系統(tǒng)的初步設(shè)計要求。
4 結(jié) 論
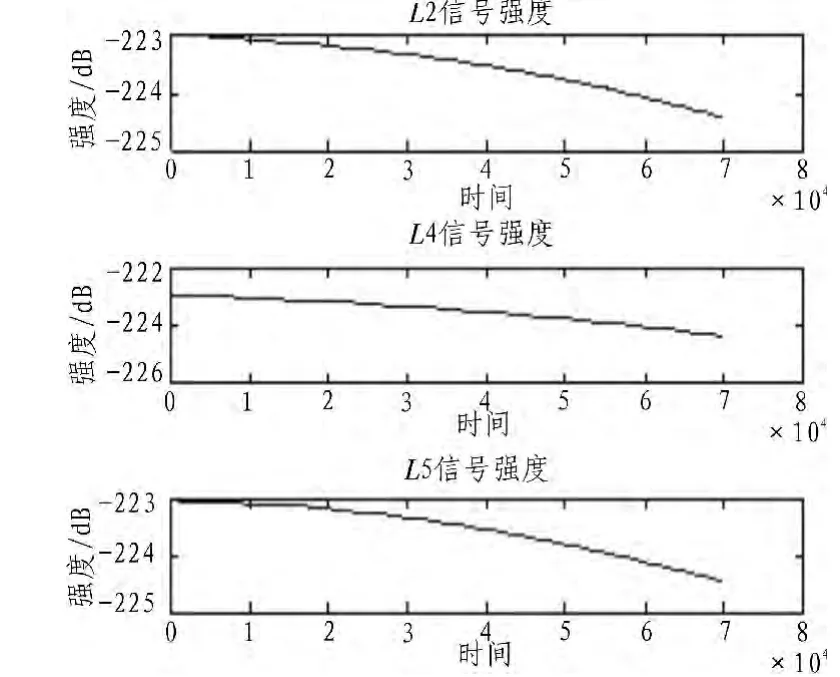
圖7 Halo-VP-VP衛(wèi)星信號衰減仿真Fig.7 The navigation signal attenuation simulation of Halo-VP-VP

圖8 衛(wèi)星信號功率譜分析Fig.8 The navigation signal power spectrum analysis
根據(jù)拉格朗日導(dǎo)航系統(tǒng)的特點,在對拉格朗日導(dǎo)航系統(tǒng)衛(wèi)星信號進行分析和建模的基礎(chǔ)上,提出了主要的測試性能指標(biāo)與評估技術(shù),基于matlab和C++設(shè)計了導(dǎo)航系統(tǒng)性能評估測試平臺,并給出了測試平臺的架構(gòu)和實現(xiàn)流程圖。通過生成不同的數(shù)字中頻信號進行仿真實驗,結(jié)果表明該測試平臺可以實現(xiàn)對導(dǎo)航系統(tǒng)及衛(wèi)星信號的測試評估,并達到了系統(tǒng)設(shè)計的要求,為以后的接收機搭建和試驗衛(wèi)星驗證提供參考依據(jù)。
[1]胡志剛.北斗衛(wèi)星導(dǎo)航系統(tǒng)性能評估理論與試驗驗證[D].武漢:武漢大學(xué)大地測量學(xué)與測量工程,2013.
[2]石慧慧,盧曉春,饒永南.GNSS信號穩(wěn)定性評估方法研究[J].時間頻率學(xué),2013,36(2):97-105.SHI Hui-hui,LU Xiao-chun,RAO Yong-nan.Methods of evaluation for GNSS signal stability[J].Journal of Time and Frequency,2013,36(2):97-105.
[3]Hein G W,Avila-Rodriguez J A,Wallner S,et al.MBOC:The new optimized spreading modulation recommended for GALILEO L1 OS and GPS L1C.In:Proceedings of IEEE/ION PLANS 2006.Virginia:Institute of Navigation,2006:883-892.
[4]Avila-Rodriguez J A,Hein G W,Wallner S,et al.The MBOCmodulation:The final touch to the Galileo frequency and signal plan[D].ION GNSS 20th International technical Meeting of the Satellite Division.Virginia:Institute of Navigation,2007:1516-1529.
[5]Wallner S,Hein G W,Avila-Rodriguez J A.Interference computations between several GNSS systems[M].Proceedings of ESA Navitec 2006.Noordwijk:The Netherlads,2006.
[6]Wallner S,Hein G W,Pany T,et al.Interference computations between GPS and GALILEO.In:ION GNSS 18th International Technical Meeting of the Satellite Division[D].Virginia:Institute of Navigation,2005.
[7]唐祖平,周鴻偉,胡修林.Compass導(dǎo)航信號性能評估研究[J].中國科學(xué):物理學(xué)力學(xué)天文學(xué),2010,40(5):592-602.TANG Zu-ping,ZHOU Hong-wei,HU Xiu-lin.Research on performance evaluation of Compass signal[J].Scientia Sinica Phys, Mech&Astron,2010,40(5):592-602.
[8]賀成艷.GNSS空間信號質(zhì)量評估方法研究及測距性能影響分析[D].北京:中國科學(xué)院大學(xué)天體測量與天體力學(xué),2013.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
- 電子設(shè)計工程的其它文章
- 300 MW CFB 直接空冷系統(tǒng)防凍控制策略優(yōu)化設(shè)計
- 意法半導(dǎo)體(ST)新功率MOSFET實現(xiàn)近乎完美的開關(guān)性能
- 1A、2MHz、60V升壓 /SEPIC/負(fù)輸出 DC/DC轉(zhuǎn)換器具 6μA靜態(tài)電流
- 意法半導(dǎo)體(ST)的先進60V功率MOSFET為提高同步整流電路能效量身定制
- 采用3 mm×5 mm QFN封裝的雙通道、低噪聲偏置發(fā)生器為敏感電路應(yīng)用提供了超低噪聲和紋波
- Diodes最新占位面積小雙低壓差130 mA穩(wěn)壓器適用指紋辨識模塊