
基于圖像點(diǎn)特征的拼接技術(shù)研究
2015-01-29 02:57:44周美麗郭建峰
電子設(shè)計(jì)工程 2015年12期
周美麗,郭建峰
(延安大學(xué) 陜西 延安 716000)
日常生活中,人們總希望能拍攝出場(chǎng)景范圍大,分辨率高的圖象。但由于各種限制,兩者很難同時(shí)滿(mǎn)足。若照片場(chǎng)景范圍較大,則分辨率就會(huì)較低,反之若對(duì)分辨率要求高,則拍攝場(chǎng)景范圍自然就會(huì)縮小。而圖像拼接技術(shù)就可以有效地解決這個(gè)問(wèn)題。國(guó)外早在1996年Hueng Yueng Shun和Richard Szeliski[就提出了一種模型,它是基于運(yùn)動(dòng)的全景圖像拼接,具體操作是先計(jì)算出拼接圖像間的幾何變換,再進(jìn)行融合。到了2000年,Shmuel Peleg及其團(tuán)隊(duì)提出了另一種模型——自適應(yīng)圖像拼接模型,而首次出現(xiàn)SIFT算法是在在2003年ICCV大會(huì)上Brown提出的,他使用SIFT算法進(jìn)行圖像拼接,該算法能夠自動(dòng)拼接過(guò)程,并且證明有良好的效果。Brown的此次發(fā)言再次掀起了人們研究圖像拼接技術(shù)的興趣。近年來(lái),我國(guó)的圖像拼接技術(shù)同樣取得了較好的成績(jī)。1996年,鐘力等人提出進(jìn)行圖像匹配時(shí)參照兩列像素的灰度比值,最后拼接圖像時(shí)采用加權(quán)融合的方法。李躍等人在2001年,對(duì)電路圖采用模板進(jìn)行圖像匹配,從而實(shí)現(xiàn)拼接。2007年,李寒等人在國(guó)內(nèi)成功使用SIFT特征點(diǎn)進(jìn)行圖像拼接,此算法有效突破了在光照和尺度下的局限。目前,圖像拼接技術(shù)已經(jīng)取得許多可喜成果,并且應(yīng)用已逐步擴(kuò)展到航天航空、工業(yè)領(lǐng)域、醫(yī)學(xué)圖像等領(lǐng)域。
1 數(shù)字圖像拼接流程圖
典型的基于特征點(diǎn)[1]的數(shù)字圖像拼接系統(tǒng)主要包含以下步驟:開(kāi)始先對(duì)圖像進(jìn)行預(yù)處理、然后提取圖像特征、并且根據(jù)特征進(jìn)行匹配、尋找最優(yōu)的匹配點(diǎn)對(duì)、變換模型參數(shù)估計(jì)、最后進(jìn)行圖像融合。總體如框圖4所示。
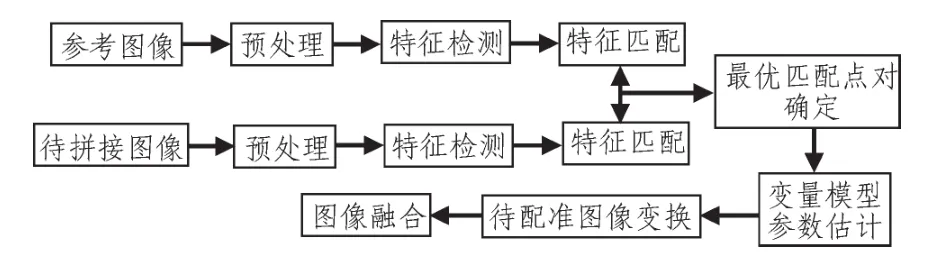
圖1 像拼接系統(tǒng)的構(gòu)成Fig.1 Image mosaicing system
圖像拼接適用于多幅圖像,為了簡(jiǎn)化步驟,這里只研究?jī)煞鶊D像的拼接問(wèn)題,其與多幅圖像原理一樣。在兩幅圖像中任選一幅圖像為參考圖像不做任何處理,則另一幅圖像是待拼接圖像需要進(jìn)行變換,然后投影到參考圖像的坐標(biāo)系中進(jìn)行比較,最后進(jìn)行圖像的融合。在上圖1系統(tǒng)中圖像預(yù)處理主要是對(duì)數(shù)字圖像進(jìn)行基本處理,如直方圖處理、高斯濾波處理等,通過(guò)對(duì)圖像進(jìn)行變換,如快速傅立葉變換,Gabor變換[1],小波變換等,得到圖像的匹配模板。特征提取即提取圖像的角點(diǎn)特征。特征匹配部分此處為角點(diǎn)匹配,即找出唯一對(duì)應(yīng)角點(diǎn),本文采用歸一化互相關(guān)及誤差平方和的辦法來(lái)匹配,初步找出所有可能正確的匹配角點(diǎn),然后采用RANSAC算法進(jìn)行處理確定最優(yōu)匹配點(diǎn)對(duì),刪除不滿(mǎn)足要求的點(diǎn)對(duì),最終留下來(lái)的點(diǎn)對(duì)就是所需點(diǎn);變換模型參數(shù)估計(jì)也稱(chēng)做映射模型(Mapping Model)參數(shù)估計(jì),即是將輸入圖像向參考圖像映射的坐標(biāo)變換函數(shù);圖像融合模塊是圖像拼接的最后一個(gè)步驟,在此過(guò)程中需要消除圖像拼接之后產(chǎn)生的拼接線。本文所要進(jìn)行拼接的圖像如圖2和圖3所示。

圖2 為參考圖片圖Fig.2 Reference image map

圖3 為待拼接圖片F(xiàn)ig.3 Photo stitching
2 圖像特征點(diǎn)的提取
圖像特征點(diǎn)通常包括線交叉點(diǎn)、拐角、邊界線曲率最大點(diǎn)、封閉曲線的質(zhì)心點(diǎn)等,本文主要討論采用Harris角點(diǎn)來(lái)實(shí)現(xiàn)圖像拼接。Harris角點(diǎn)檢測(cè)算法擁有很多優(yōu)點(diǎn)[2]:計(jì)算量小;具有較高的穩(wěn)定性和魯棒性;能夠準(zhǔn)確對(duì)經(jīng)過(guò)任意旋轉(zhuǎn)、灰度改變后的圖像提取角點(diǎn)。基于以上幾點(diǎn),本文采用Harris角點(diǎn)法來(lái)提取圖像的特征點(diǎn),如式(1):

其中,M為矩陣,Ix和Iy分別為圖像I在X,Y方向上的一階導(dǎo)數(shù),k為高斯模板,CRF的局部極大值點(diǎn)就是角點(diǎn)[3]。圖像拼接過(guò)程中,為了得到匹配的特征點(diǎn)才進(jìn)行角點(diǎn)檢測(cè),因此要求角點(diǎn)檢測(cè)算法所檢測(cè)到的角點(diǎn)中,匹配點(diǎn)對(duì)比例盡可能大。所謂角點(diǎn)匹配通俗的講就是在圖1和圖2中找出唯一對(duì)應(yīng)角點(diǎn),這是自動(dòng)匹配的關(guān)鍵步驟。常用的角點(diǎn)匹配方法有兩種:即不相似測(cè)度SSD和相似測(cè)度NCC,本文采用的是相似測(cè)度NCC[4]來(lái)完成特征點(diǎn)匹配,如式(2):

采用NCC匹配方法,有效排除了其它信息的干擾,進(jìn)行角點(diǎn)初始匹配過(guò)程中,由于物體的獨(dú)立運(yùn)動(dòng)和噪聲的干擾,難免會(huì)造成一定的錯(cuò)誤匹配.本文針對(duì)這個(gè)問(wèn)題提出了改進(jìn)的算法,用來(lái)消除錯(cuò)誤匹配。這種改進(jìn)的特征匹配對(duì)縮放或角度旋轉(zhuǎn)程度小的圖像非常有效。如式(3)、式(4):
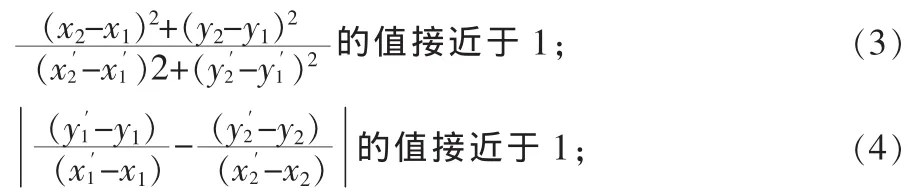
如果在兩幅圖像中的對(duì)應(yīng)特征點(diǎn)滿(mǎn)足這一條件,就是一個(gè)有效的匹配對(duì),反之,則是誤匹配對(duì)。采用這種方法處理完所有的初始匹配點(diǎn)對(duì)后,就可以得到所有合適的匹配點(diǎn)對(duì)。本文進(jìn)一步采用RANSAC算法再次消除誤匹配[5],從而得到精確度更高的匹配點(diǎn)對(duì)。如圖4和圖5所示即為提取特征點(diǎn)圖像。

圖4 對(duì)圖1提取特征點(diǎn)Fig.4 The points of Fig 1 extraction

圖5 對(duì)圖2提取特征點(diǎn)Fig.5 The points of Fig 2 extraction
3 圖像融合
整個(gè)圖像拼接處理過(guò)程當(dāng)中的最后一個(gè)步驟是圖像融合(Image Blending),圖像融合就是把匹配后的兩幅圖像根據(jù)對(duì)應(yīng)的位置合并為一幅圖像。圖像融合的目的是要消除圖像中較強(qiáng)的光或間斷的色彩。常用算法有:平均值法、加權(quán)平均法、歐式距離法[8],本文進(jìn)行圖像融合采取的是加權(quán)平均法。為了要使拼接區(qū)域不出現(xiàn)明顯間斷,消除拼接線,采用加權(quán)平均算法[9],如式(5):

產(chǎn)生加權(quán)平均的作用為了使用圖像實(shí)現(xiàn)平滑過(guò)渡的效果,使顏色慢慢過(guò)渡,避免圖像模糊不清或出現(xiàn)明顯的邊界,其中,d為漸變因子,它的取值為重疊區(qū)圖像寬度的倒數(shù),I11(x,y)為參考圖像中重疊部分,I22(x,y)是待匹配圖像中的重疊部分,融合后為 I(x,y)。
有了可靠的的圖像特征點(diǎn)對(duì),就可以對(duì)整個(gè)圖像進(jìn)行拼接處理。圖像拼接的目的是要消除拼接縫。實(shí)際操作中,通常對(duì)重疊區(qū)域角點(diǎn)采用加權(quán)平滑方法[6],從而實(shí)現(xiàn)平滑過(guò)渡。如圖6所示。
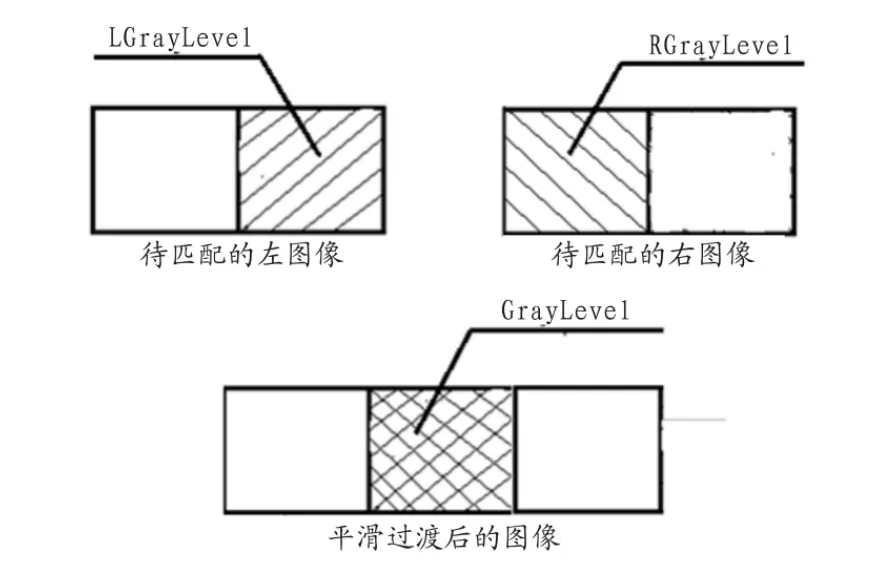
圖6 消除拼接縫原理Fig.6 The elimination of seam diagram
拼接后圖像重疊部分象素點(diǎn)的灰度值GrayLevel由拼接前具有相同重疊區(qū)域圖像中對(duì)應(yīng)點(diǎn)的灰度值LGrayLevel和RGrayLevel加權(quán)平均得到,其數(shù)學(xué)模型如式(6)所示:

其中:k是漸變因子,滿(mǎn)足0<k<l,由左邊圖像的重疊部分慢慢過(guò)渡到右邊圖像重疊部分的平滑拼接,是通過(guò)k由1漸變至0實(shí)現(xiàn)的,其漸變方向?yàn)閺淖蟮接摇O聢D中陰影部分是圖像待匹配的重疊區(qū)域,左圖中重疊部分中的一點(diǎn)LGrayLevel與右圖中對(duì)應(yīng)點(diǎn)RGrayLevel在拼接時(shí)重疊,當(dāng)把二者合二為一時(shí),重疊的LGrayLevel與RGrayLevel就變成了一點(diǎn)Graylevel,從而實(shí)現(xiàn)過(guò)渡時(shí)能夠保持平滑。如圖7所示為圖像融合后的效果圖。

圖7 是拼接后圖像Fig.7 The mosaic image
4 結(jié)束語(yǔ)
通過(guò)上述實(shí)驗(yàn)可以看出采用本文所建立的圖像拼接模型可以對(duì)圖像進(jìn)行很好的拼接。把拼接后的圖像與原圖進(jìn)行比對(duì),幾乎肉眼觀察不到二者的差別。這一系統(tǒng)模型是在VC++6.0平臺(tái)下構(gòu)建的,它具備界面制作簡(jiǎn)單、運(yùn)行速度良好等優(yōu)點(diǎn),可廣泛用于圖像修復(fù)領(lǐng)域。
[1]Chale A,Naghdy G,Mertins A,Sketch-based image matching using angular partitioning systems[J].IEEE Transactions on Man and Cybernetics,Part A,2005,35(1):28-41.
[2]章毓晉,圖像工程,圖像處理[M].2版.北京:清華大學(xué)出版社,2005.
[3]胡社教,葛西旺,陳宗海.基于角點(diǎn)特征的KLT跟蹤全景圖像拼接算法[J].系統(tǒng)仿真學(xué)報(bào),2007,19(8):1742-1744.HU She-jiao,GE Xi-wang,CHENG Zong-hai.The stitching algorithm based on the image feature point of tracking KLT panoramic[J].Journal of System Simulation,2007,19(8):1742-1744.
[4]李曉娟.圖像拼接技術(shù)研究[D].西安:西安電子科技大學(xué),2007.
[5]陸方杰.基于特征的數(shù)字圖像拼接技術(shù)研究[D].杭州:浙江大學(xué),2007.
[5]Sevket Gumustekin.An introduction to image mosaicing.[EB/OL].(2008-03-20)http://www.iyte.edu.tr/eee/sevgum/research/mosaicing99/.
[6]李寒,牛紀(jì)禎,郭禾.基于特征點(diǎn)的全自動(dòng)無(wú)縫圖像拼接方法[J].計(jì)算機(jī)工程與設(shè)計(jì),2007,28(9):2083-2085.LI Han,NIU JI-zhen,GUO He.The mosaic method of Automatic seamless image based on feature points[J].Computer Engineering and Design,2007,28(9):2083-2085.
[7]Szeliski R,Video mosaic for Virtual Environments[J].IEEE Computer Graphics and Applications,1996,16 (2):22-30.
[8]Harris C,Stephens M.A combined corner and edge detector,Proceedings Fourth Alvey Vision Conference[J].Manchester,1988:147-151.
[9]徐餛.穩(wěn)健的圖像拼接算法研究[D].南昌:南昌大學(xué),2005.
[10]葛西旺.一種精確的圖像拼接方法[J].安徽建筑工業(yè)學(xué)院學(xué)報(bào),2007,15(1):69-72.GE Xi-wang.An accurate method for image mosaic[J].Journal of Anhui Construction Industry Institute,2007,15(1):69-72.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
- 電子設(shè)計(jì)工程的其它文章
- 英飛凌推出具有智能保護(hù)功能的智能功率模塊MIPAQTM Pro,助力開(kāi)發(fā)緊湊可靠的物聯(lián)網(wǎng)逆變器
- 安森美半導(dǎo)體推出全系列雙倍數(shù)據(jù)速率(DDR)終端穩(wěn)壓器
- Imagination發(fā)布可實(shí)現(xiàn)下一代SoC安全性的OmniShield技術(shù)
- 36V、800mA堅(jiān)固型線性穩(wěn)壓器具有擴(kuò)展的SOA并提供了簡(jiǎn)單的三端操作
- 英飛凌推出新款大功率光觸發(fā)晶閘管 首次集成保護(hù)功能
- Imagination的ClearCallTM VoIP應(yīng)用現(xiàn)可支持Cavium的OCTEON? Ⅲ多核處理器