基于Skyline的衛星紅綠立體影像制作方法
2015-02-06 07:58:22昝良
地理空間信息 2015年3期
關鍵詞:效果
昝 良
(1.解放軍理工大學,江蘇 南京 210007)
基于Skyline的衛星紅綠立體影像制作方法
昝 良1
(1.解放軍理工大學,江蘇 南京 210007)

提出一種基于Skyline的衛星立體影像制作方法,使用Skyline加載地形及融合影像,調整虛擬相機的拍攝位置及角度,制作出多角度地形真彩色紅綠立體影像。解決了當前衛星紅綠立體影像制作中出現的角度單一、幅寬受限、容易漲眼、效果不明顯且丟失顏色信息等問題。
Skyline ;相機多角度;真彩色;紅綠立體
衛星遙感影像可以用來制作DOM、DLG以及DEM等。同時,可使用衛星攜帶的三線陣相機、高分辨率相機,通過某2個視圖的影像制作紅綠立體影像圖。紅綠立體影像能提供良好的三維視覺效果[1],在測繪作業上具有重要的價值。但使用傳統方法制作的紅綠立體影像受制于衛星的拍攝角度、相機屬性等各種客觀條件,制作出的立體影像有幾點無法克服的問題:
1)視角單一。使用2個視角的相機對被觀察點進行的拍攝,觀察點位于衛星的軌道上,處于被觀察場景正上方,視線基本為垂直于地面方向向下,這就使得制作出的紅綠影像視角單一。
2)幅寬受限。衛星拍攝的每一景幅寬是固定的,若要制作大于衛星幅寬的立體影像,就需要對兩幅影像進行拼接,這樣就改變了影像的透視特征,出現變形。因此,使用傳統方法制作的紅綠立體影像場景不能超過衛星相機幅寬。
3)容易漲眼。人眼可以感受到立體效果的范圍在0.72°~6°之間,小于這個角度就感覺不到立體效果,大于這個角度會感覺到漲眼。相機夾角可能會遠大于6°,不符合人眼觀察事物的習慣,會出現漲眼等問題。
4)效果不佳。由于某些地區的地形起伏不明顯,立體效果不佳,無法對地形進行夸張。
5)色彩信息丟失。采用傳統方法制作紅綠立體影像,數據的主要來源是三線陣相機。三線陣相機影像的主要用途是通過立體像對生成DEM,因此相機采用的是全色相機。這種方法制作的立體影像是采用2個視圖的影像分別提取紅綠通道進行疊加生成,因此丟失了影像的顏色信息,只具有紋理特征。
Skyline的軟件系統一直在基于網絡的三維可視化軟件中居于領先地位[1,2]。該軟件系統平臺從影像數據生產、編輯到互聯網發布都提供了成熟的解決方案。而且,其開放了所有的API,能夠讓用戶根據自己的需求編寫程序,定制功能。Skyline家族包括TerraExplorer、TerraBuilder以及TerraGate等,分別用于地形瀏覽,地形影像制作以及數據的發布[3]。Skyline內置的攝像機模塊可從不同的角度對虛擬地形場景進行觀察。本文提出一種基于Skyline的衛星立體影像制作方法。
1 原 理
1.1 人眼立體視覺原理
人眼之所以能看到立體的景物,是因為雙眼各自獨立地看物體。人的大腦視覺系統將兩幅有輕微不同的圖像進行融合,就產生出立體效果[4-6],如圖1所示。
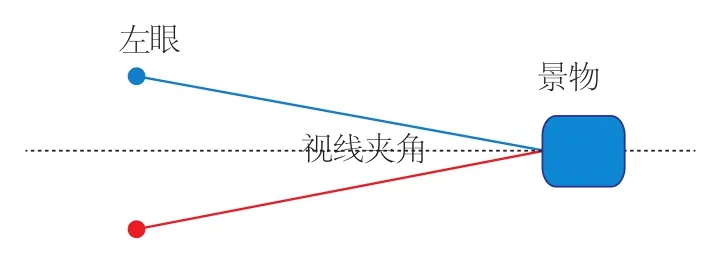
圖1 人眼觀察立體示意圖
一般成人兩眼瞳孔間距在6.3~7.0 cm之間,以7.0 cm為例,人眼最佳觀看范圍是0.7~5 m,當人眼距觀察物體距離為0.7 m時,目標距離與瞳距比為10∶1,此時雙眼夾角約為6°,產生最大視差,當人眼距觀察物體距離為5 m時,目標距離與瞳距比為71∶1,此時雙眼夾角約為0.72°,為最小視差,物體再遠,就無法辨認遠近了。
因此,立體攝影需要重現這一規則,即

式中,D為相機間距;S為目標與相機中間點的距離。
1.2 拍攝方式
進行立體拍攝時,可使用兩種拍攝方式:Toe-in Method和Correct Method。
Toe-in Method使用較多,進行拍攝時,2個攝像機指向同一點,如圖2所示。

圖2 使用Toe-in Method進行拍攝
使用Toe-in Method方法進行拍攝,可生成具有立體效果的圖像,但該方法會產生豎直方向上的視差,立體圖邊緣會產生眩暈。使用Correct Method進行拍攝時,投影方式為”parallel axis asymmetric frustum perspective projection”[7],即平行軸不對稱視椎體透視投影,能夠克服豎直視,如圖3所示。

圖3 使用Correct Method進行拍攝
1.3 地球任意兩點距離計算
設第一點A的經緯度為(LonA,LatA),第二點B的經緯度為(LonB,LatB),按照0°經線的基準,東經取經度的正值(Longitude),西經取經度的負值(-Longitude),北緯取90-緯度值(90- Latitude),南緯取90+緯度值(90+Latitude),則經過上述處理過后的兩點被計為(MLonA, MLatA)和(MLonB,MLatB)。根據三角推導,可以得到計算兩點距離的公式如下:

式中,C為中間變量;R表示地球半徑6 371.004 km;Distance為地表兩點間距離;Distance和R單位相同,Arccos()為反余弦函數。
1.4 計算經緯度
已知一點A(X,Y)經緯度及另一點B的距離r與方位角a,計算B(Lon,Lat)的經緯度。
1)同一經度上,緯度每隔1°相差111 km;
同一緯度上,經度每隔1°相差111*cos(Lat)km,Lat表示該點緯度;
2)兩點在同一經度上的緯度距離差為:

兩點在同一緯度上的經度距離差為:

式中,r為兩點距離,單位為km;a單位為弧度,以正北方向順時針開始。
3)在經度上的偏移度數為:

在緯度上偏移度數為:

則:

可求出B點的經緯度Lon、Lat。
1.5 Skyline攝像機
Skyline中,攝像機位置參數有X、Y、Z,用于標示相機在笛卡爾坐標系中的位置,相機的角度參數有偏移角(方向)Direction、俯仰角(傾斜)Tilt以及翻滾角Roll,如圖4所示。

圖4 Skyline相機參數示意圖
偏移角范圍從0°~360°,0°為北,180°為東,270°為西。俯仰角范圍-90°~90°,90°為從下到上垂直,-90°從上到下垂直。翻滾角范圍-90°~90°,-90°為向左翻滾至垂直,90°向右翻滾至垂直[8]。若角度不在參數范圍,Skyline會自動增減角度周期,調整數值至參數范圍。
2 多視角衛星紅綠立體影像實現
2.1 相關參數設置
將高分辨率影像與多光譜影像進行融合,使用TerraGate加載DEM模型與融合影像,生成模型,供程序加載。
Skyline相機相關參數如表1所示,距離參數單位m,角度參數單位°。

表1 Skyline相機參數設置
2.2 控制攝像機角度和位置關鍵代碼
//創建位置
IPosition61 cPos = objSGWorld2.Creator. CreatePosition(dXCoord, dYCoord, dAltitude, eAltitudeTypeCode, dYaw, dPitch, dRoll, dDistance);
//跳到該位置
objSGWorld2.Navigate.SetPosition(cPos);
2.3 立體圖拍攝與制作
圖5使用Toe-in Method,平行于水平面進行拍攝。
可以看出,最終效果圖中,圖像右上角的位置的山峰紅通道偏右,綠通道偏左,拍攝中心點紅通道偏左,綠通道偏右,相機焦點在屏幕中心點靠后的位置。通過佩戴紅綠眼鏡,可以觀察到效果圖立體效果明顯,場景層次分明。
圖6使用Correct method,垂直于水平面進行拍攝。通過佩戴紅綠眼鏡,可以很觀察到效果圖立體效果明顯,山峰山谷立體效果十分明顯。

圖6 效果圖B
3 結 語
地學可視化經歷了二維到三維的發展[9],本文提出一種利用Skyline提供的攝像機制作紅綠立體影像的方法。結果表明,該方法能有效解決傳統的衛星紅綠立體影像的視角單一、幅寬受限、容易漲眼、效果不佳以及色彩信息丟失的缺點,實現了從不同的角度制作地形紅綠立體影像、幅寬不受限、角度可控制在人眼舒適度可接受的范圍內,同時通過地形模型的制作,適當進行地形夸張,增強了立體效果,在附上融合影像時保留了顏色信息。
由于立體照片拍攝過程中,前景、中景、后景以及背景之間的位置和比例關系會影響到立體顯示的效果,不當的拍攝會產生難以接受的重影。同時,由于濾光片不能100%進行分光,左眼會看到右眼的部分場景,影像大腦三維再造,導致與實際不符,使用棱柱將解決這一問題。以上2點將是作者研究的重點。
[1] 梁吉欣,左小清. Skyline在Web三維GIS中的應用研究[J].昆明理工大學學報:理工版,2009,34(2):1-4
[2] 李虎,吳家鑄.基于Skyline的戰場態勢系統研究與實現[J].計算機工程與科學, 2009,31(4):26-28
[3] 鄧潔,夏春林,王潤芳.基于Skyline Terrasuite的城市三維景觀的建立[J].遙感技術與應用, 2008,23(5):529-532
[4] 李娟,關祥宏.基于微機的三維真立體顯示技術評述[J]. 鐵道勘察, 2005,31(2):24-26
[5] 趙穎,雷志勇,雷鳴. 虛擬現實中立體顯示技術研究[J]. 電子設計工程, 2009,17(10):116-118
[6] 李偉鋒.基于紅綠立體影像的地形三維可視化研究[J].科技風,2010(11) :207-209
[7] Bourke P.3D Stereo Rendering Using OpenGL(and GLUT) [EB/OL]. http://wenku.baidu.com/view/89e3b57da26925c52cc5bf58. html,2013-07-26
[8] 武藝,趙冬至,黃鳳榮,等. 基于Skyline的流域河口生態安全評價三維場景實現技術[J]. 海洋環境科學,2012,31(1):88-91 [9] 陳鵬, 林鴻 ,張鵬程,等.二三維一體化在Skyline與SuperMap6R中的實現對比[J]. 地理空間信息, 2011, 9(3):65-68
P237.4
B
1672-4623(2015)03-0044-03
10.3969/j.issn.1672-4623.2015.03.016
昝良,碩士,研究方向為指揮自動化與戰場環境數字化。
2013-10-11。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學生學習指導(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學生學習指導(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
