基于單片機的倒車雷達測距系統研究
2015-02-15 05:48:06杜俠焦國太秦棟澤張樹云梁震
河北農機 2015年12期
杜俠 焦國太 秦棟澤 張樹云 梁震
1、山西中北大學機電工程學院 2、山西中煤平朔集團有限公司
引言
目前,交通運輸車輛不斷增多,所產生的交通問題也日益突出,其中倒車碰撞事故占有很大一部分比例。作為一種提高車輛駕駛安全性的重要設備——倒車雷達,得到了人們普遍的使用。本文設計的倒車雷達測距系統是利用超聲波測距原理設計而成的,相比于熱感應測距和紅外線測距,其使用更加方便,且測距精準,原理簡單,價格低廉,具有更大的集成開發空間。
1 電路設計的整體思路
整個倒車雷達預警系統采用模塊化設計,具體分為單片機最小系統、電機驅動模塊、超聲波測距模塊、危險警示模塊和穩壓電源模塊五大部分。通過相關的硬件測試和軟件調試,實現了倒車雷達危險預警等顯示功能。
整體結構框圖如圖1所示。
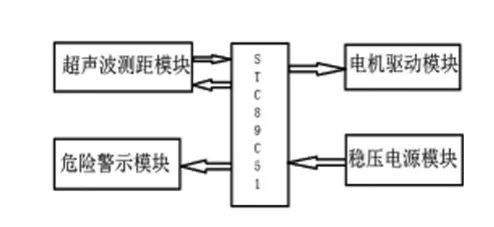
圖1 系統總體結構框圖
2 硬件電路設計
2.1 單片機最小系統
單片機最小系統是指用最少的元器件組成的單片機可以基本工作的系統。對51系列單片機來說,最小系統一般應該包括:單片機、晶振電路和復位電路。
2.1.1 晶振電路
單片機最小系統中的晶振電路,全稱為“晶體振蕩電路”,一般由晶振和部分電容構成。本次系統的晶振電路使用12MHz的晶體振蕩器作為振蕩源,由于單片機內部帶有振蕩電路,所以外部只需要連接一個晶振和兩個瓷片電容即可,電容容量一般在15pf至50pf之間,如圖2所示。
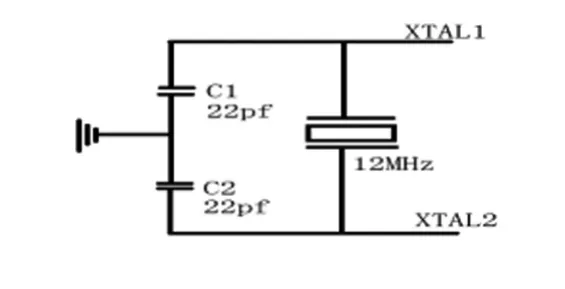
圖2 晶振電路
2.1.2 復位電路設計
為了兼顧自動復位和手動復位的要求,本設計將該系統的上電復位電路和手動復位電路結合在了一起,實現了單片機啟動運行時的自動復位操作和特殊情況下用戶的手動復位操作。需注意的是,復位操作不影響片內RAM的內容。單片機最小系統的電源入口處,并聯一個100uf的電解電容和一個0.1uf的瓷片電容,用來濾波,以清除影響其正常工作的有害信號。系統的復位電路如圖3所示。
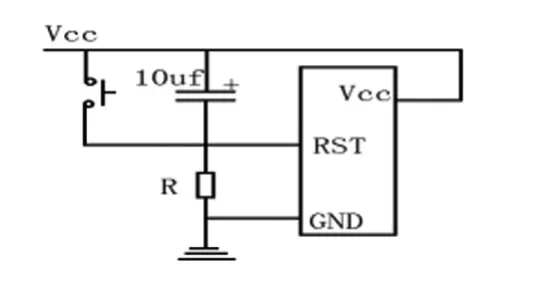
圖3 系統的復位電路
2.2 電機驅動模塊
由于單片機的驅動能力很弱,所以本系統采用L298N驅動芯片來驅動電機。為保證小車具有強勁的動力,采用了兩個L298N芯片來分別驅動小車左右兩個電機。并且選用8個整流二極管IN4007組成該電路釋放感生電流的通道,對整個驅動電路起到過流保護的作用。如圖4所示。
2.3 超聲波測距模塊
本設計采用HC-SR04型超聲波傳感器作為系統的超聲波收發裝置,該測距模塊具有2~400cm的非接觸式距離感測能力,測距精度可達到3mm。該模塊上電后,單片機引腳輸出高電平給控制信號輸入端TRIG至少10μs的時間,模塊將發送一組8個40KHz的方波信號,并將回波信號輸出端ECHO電平置高,同時,自動檢測是否有信號返回,若有信號返回,則回路信號輸出端ECHO輸出低電平,所以高電平持續的時間就是超聲波從發射到返回的時間。單片機通過對該時間的測量,就可以測算出超聲波傳感器與障礙物之間的距離,計算公式為:

其中S為距離;t為高電平持續時間;v為聲速(340m/s)。
2.4 危險警示模塊設計
系統的聲光報警元器件采用發光二極管和蜂鳴器。考慮到單片機的驅動能力很弱,所以還需要設計一個蜂鳴器驅動電路,用三極管S8550來放大電流使其發聲,電路如圖5所示。

圖5 蜂鳴器驅動電路
2.5 穩壓電源模塊設計
系統采用額定電壓為12V的充電電池作為電源,并且分為兩部分進行供電,一部分以12V電壓提供給L298N芯片輸出以驅動電機轉動,另一部分經過降壓穩定在5V,以提供給各個模塊正常工作。在芯片的輸入、輸出與地之間接入大小不同的三個濾波電容C1、C2、C3以輸出標準的5V電壓保證7805芯片工作穩定需要,如圖6所示。
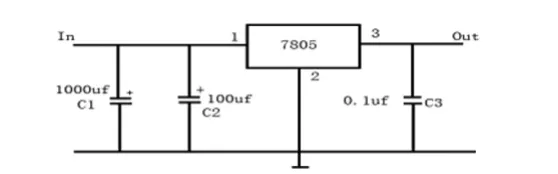
圖6 LM7805 芯片穩壓電路
3 系統的軟件設計
分析該倒車雷達測距系統工作過程,軟件要實現的功能包括以下幾個方面:
(1)使用PWM脈沖寬度調制的方法來控制小車的移動(電機的轉速);
(2)觸發超聲波測距模塊產生超聲波,并檢測回波信號輸出端的實時信號;
(3)通過回波信號計算車體與障礙物之間的距離值;
(4)通過液晶屏1602A來顯示該距離值;
(5)觸發危險警示模塊發出聲光報警。
系統程序流程如圖7所示。
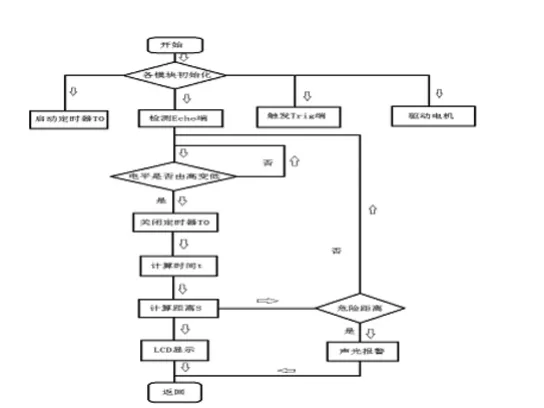
圖7 系統程序流程圖
4 結論
本文對系統的設計方案進行了論證,詳細地介紹了各個模塊的功能、組成及其工作原理,并闡述了整個軟件編寫的程序內容。雖然倒車雷達測距系統給我們帶來了很大的方便,但是因為雷達探測存在盲區,也會給駕駛人員帶來一些不可避免的困難。所以在未來倒車雷達系統的研制方面,要更大程度地利用科學技術,對于低矮的障礙物,要增大探頭的探測角度,實現車后全方位的探測,對于過于細小的障礙物,要增強系統對較小反射信號的捕捉能力,以最大程度地幫助駕乘人員倒車泊位,保證駕駛的安全性。
[1]劉海峰.汽車倒車雷達系統全接觸[J].汽車電器,2007,12:5-8.
[2]庾晉,周潔.透視汽車倒車雷達[J].汽車運用,2004.01:32-33.
[3]王紅梅.高分辨力超聲測距方法的研究[D].山東科技大學,2004.
[4]張樂,任國華,王省書.現代汽車的測距技術與應用[J].交通與運輸,2004,06:48-49.
[5] 李朝青. 單片機原理與接口技術(簡明修訂版).北京:北京航空航天大學出版社,1999.
[6]朱維杰,于湘珍.基于超聲波測距的自適應倒車雷達設計 [J]. 汽車電器,2009,04:15-17.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
