一種GNSS大網(wǎng)數(shù)據(jù)快速高效處理策略
2015-02-15 01:07:44呂志平張友陽陳正生李林陽
大地測量與地球動(dòng)力學(xué) 2015年3期
崔 陽 呂志平 張友陽 陳正生 李林陽
1 信息工程大學(xué)地理空間信息學(xué)院,鄭州市科學(xué)大道62號,450001
2 鄭州輕工業(yè)學(xué)院機(jī)電工程學(xué)院,鄭州市東風(fēng)路5號,450002
目前,GNSS數(shù)據(jù)的主要處理方法是雙差網(wǎng)解和非差精密單點(diǎn)定位(PPP)[1-2]。PPP 的處理時(shí)間呈線性增加,而雙差網(wǎng)解的處理時(shí)間呈幾何倍數(shù)增加,當(dāng)測站規(guī)模增加時(shí),兩種處理策略都因計(jì)算能力有限而無法高效處理[3-5]。陳俊平等[6]建議增加數(shù)據(jù)采樣間隔以實(shí)現(xiàn)GNSS 的非差數(shù)據(jù)處理。程傳錄等[7]提出移動(dòng)格網(wǎng)密度法,以優(yōu)化GAMIT 軟件劃分子網(wǎng)算法的局限性。從解算精度上比較,PPP解算結(jié)果和雙差網(wǎng)解精度基本一致[8],但精密單點(diǎn)定位的東向精度仍然可以通過整周模糊度的固定得到提高,使解算結(jié)果接近全網(wǎng)解算結(jié)果。為了提高PPP 的精確性和準(zhǔn)確性,可聯(lián)合PPP 解算結(jié)果,進(jìn)行雙差載波相位模糊度固定解算[9-10]。因此,基于PPP模式的網(wǎng)解是大型GNSS 網(wǎng)絡(luò)數(shù)據(jù)處理發(fā)展的必然趨勢。然而,全網(wǎng)模糊度解算的處理時(shí)間接近O(n4),限制了網(wǎng)絡(luò)測站數(shù)目,只能以小網(wǎng)模式固定模糊度。Blewitt[10,11]2008年提出“不動(dòng)點(diǎn) 定理”的模糊度固定方法,并基于此提出了Ambizap 算法,該算法的處理時(shí)間接近O(n),解算結(jié)果近似于全網(wǎng)模糊度的固定。隨著分布式網(wǎng)絡(luò)計(jì)算平臺(tái)的出現(xiàn),利用網(wǎng)絡(luò)中多臺(tái)計(jì)算機(jī)建立分布式計(jì)算系統(tǒng)平臺(tái)成為解決大規(guī)模測量數(shù)據(jù)計(jì)算問題的首選方法[12-13]。本文基于分布式計(jì)算理論,將Ambizap算法應(yīng)用到大型GNSS 網(wǎng)數(shù)據(jù)分布式處理中。算例表明,Ambizap的分布式應(yīng)用為大型GNSS數(shù)據(jù)處理帶來一種經(jīng)濟(jì)快捷的新方法。
1 Ambizap算法原理
Blewitt[11]在2008年基于不動(dòng)點(diǎn)理論提出Ambizap算法,該算法利用雙差模糊度解算結(jié)果來約束非差PPP解。
1.1 不動(dòng)點(diǎn)理論
“不動(dòng)點(diǎn)理論”可以描述為:在特定條件下,運(yùn)算符F(x)將至少有一個(gè)不動(dòng)點(diǎn)滿足F(x)=x條件。不動(dòng)點(diǎn)理論需要說明不動(dòng)點(diǎn)是什么或者如何找到它們。將F定義為模糊度固定運(yùn)算符,即利用雙差模糊度解算結(jié)果去約束每站的PPP解,以修正非差解,進(jìn)而更新其他相關(guān)參數(shù)。通過尋找一個(gè)固定點(diǎn)去映射從初始PPP估值參數(shù)到模糊度固定后的參數(shù)。由于參數(shù)集都可以轉(zhuǎn)變?yōu)榱硪坏葍r(jià)形式(完全線性無關(guān)的),則假設(shè)對任意值的參數(shù)s,有線性變換且滿足。網(wǎng)中存在這樣的固定點(diǎn),代表網(wǎng)中加權(quán)平均質(zhì)心點(diǎn)。
1.1.1 不動(dòng)點(diǎn)定理1:質(zhì)心
假設(shè)對n個(gè)獨(dú)立測站的PPP單站解,設(shè)其解的向量為si,方差-協(xié)方差為Ci,i∈(1,…,n)。令向量si包含測站三維坐標(biāo)分量和所有衛(wèi)星的載波相位的星間差。定義偏差固定運(yùn)算符F(Λs)為從初始PPP 解算的參數(shù)估值的任意線性組合映射到偏差固定解,第一個(gè)不動(dòng)點(diǎn)理論可表述為:

1.1.2 不動(dòng)點(diǎn)定理2:基線
網(wǎng)平差的初始信息由每站PPP解提供,網(wǎng)中的一個(gè)單一基線解將產(chǎn)生兩個(gè)模糊度固定的解向量s′i和s′j,其中均包含測站坐標(biāo)和模糊度。假設(shè)協(xié)方差是相似的,將偏差固定運(yùn)算符F應(yīng)用到整個(gè)網(wǎng)中,得到不動(dòng)點(diǎn)定理2:

每個(gè)模糊度固定后的基線的參數(shù)與網(wǎng)內(nèi)其他模糊度固定的基線是不相關(guān)的[5]。
1.2 基于雙差固定解約束PPP解的整網(wǎng)平差
設(shè)整網(wǎng)平差前PPP 實(shí)數(shù)解為Xi,協(xié)方差矩陣為Ci,測站i和j構(gòu)成的獨(dú)立基線的雙差固定解為X′i和X′j,將各個(gè)獨(dú)立基線的雙差固定解當(dāng)作獨(dú)立的子網(wǎng)。對于連續(xù)觀測的大型GPS網(wǎng)絡(luò),實(shí)踐表明,各站的非差PPP 解的精度、雙差模糊度固定解的精度均相近,則根據(jù)Blewitt提出的不動(dòng)點(diǎn)定理,可利用雙差模糊度固定解對PPP解進(jìn)行精度修正,得到整體網(wǎng)平差解。由不動(dòng)點(diǎn)定理1和2假設(shè)[2,14]:
1)整網(wǎng)平差前的測站PPP解Xi的加權(quán)平均和整網(wǎng)平差后的測站坐標(biāo)相等(整網(wǎng)平差的位置基準(zhǔn));
2)整網(wǎng)平差前的雙差基線ΔX′i?j=X′i-X′j與整網(wǎng)平差后的坐標(biāo)反算的基線向量相等(整網(wǎng)平差的方位基準(zhǔn)和尺度基準(zhǔn))。設(shè)單個(gè)測站的非差法方差為NiXi=wi,根據(jù)測站之間相互獨(dú)立的原則,構(gòu)建PPP網(wǎng)解的法方程:
引入獨(dú)立基線的雙差固定解提供的約束條件:

其中,雙差基線ΔX′i?j的協(xié)方差陣為C′i?j,i?j表示由測站i和j構(gòu)成的獨(dú)立基線。獨(dú)立基線的雙差固定解ΔX′i?j提供給測站i和j的PPP解的精度改進(jìn)為:

式中,C′i?j為雙差基線ΔX′i?j解的方差-協(xié)方差陣;Ci和Cj是測站i和j的非差PPP解方差-協(xié)方差矩陣;Ai?j為改進(jìn)后的測站i和j的方差-協(xié)方差陣;ε為一個(gè)很小的實(shí)數(shù),避免了雙差固定解不能給PPP 解提供精度改正信息而導(dǎo)致矩陣求逆病態(tài),一般取ε=10-4。將獨(dú)立基線引入的約束條件并行累加到非差PPP網(wǎng)解法方程,得到新整網(wǎng)平差的法方程:
1.3 獨(dú)立基線選擇
不動(dòng)點(diǎn)定理的應(yīng)用需逐條基線進(jìn)行雙差模糊度的固定,對于測站數(shù)為n的同步觀測網(wǎng),函數(shù)不相關(guān)的獨(dú)立基線數(shù)共有n-1條。理論上,所有雙差模糊度都可表示為獨(dú)立雙差模糊度的線性組合,在數(shù)理統(tǒng)計(jì)上是等價(jià)的,但獨(dú)立基線的不同選擇會(huì)導(dǎo)致模糊度最近整周偏差不同以及方差不同,從而影響模糊度固定的效率。一般情況下,不動(dòng)點(diǎn)理論可采取模糊度更容易固定的最短基線法構(gòu)建獨(dú)立基線網(wǎng)。本文首先采用Delaunay三角網(wǎng)剖分算法對GPS網(wǎng)進(jìn)行三角剖分,然后采用圖論中的歐幾里德最小生成樹(EMST)算法實(shí)現(xiàn)獨(dú)立基線網(wǎng)的構(gòu)建,保證所有獨(dú)立基線邊的總長度最小。其中,考慮到當(dāng)前基準(zhǔn)站數(shù)目在幾千個(gè)點(diǎn)以內(nèi),剖分時(shí)間占計(jì)算時(shí)間的比例很小,Delaunay三角網(wǎng)剖分算法采用逐點(diǎn)插入法;最小生成樹算法就是用于求解帶權(quán)無向連通圖中最小生成樹的算法,常見的有Kruskal算法、Prim 算法和Sollin算法等。
2 Ambizap算法的分布式處理
為充分利用多核多機(jī)的分布式網(wǎng)絡(luò)計(jì)算環(huán)境,對大型GNSS網(wǎng)數(shù)據(jù),可通過分布式PPP 解算和分布式獨(dú)立基線解算完成Ambizap算法的分布實(shí)現(xiàn),從而實(shí)現(xiàn)大型GNSS網(wǎng)數(shù)據(jù)分布式高效處理。圖1為按照不動(dòng)點(diǎn)理論設(shè)計(jì)并編程實(shí)現(xiàn)的GNSS數(shù)據(jù)分布式計(jì)算流程。
在圖1中,首先是采用解壓工具、TEQC等對各測站數(shù)據(jù)進(jìn)行分布式預(yù)處理,然后調(diào)用PPP模塊將測站分布并行PPP處理,根據(jù)獨(dú)立基線的選擇情況,再進(jìn)行并行基線解算,最后將獨(dú)立基線解算結(jié)果約束到PPP解算結(jié)果上,進(jìn)行整網(wǎng)平差計(jì)算。
在具體流程實(shí)現(xiàn)中,首先根據(jù)測站列表建立PPP任務(wù),控制端根據(jù)任務(wù)列表發(fā)布PPP計(jì)算任務(wù),網(wǎng)絡(luò)中可用計(jì)算節(jié)點(diǎn)并行完成PPP計(jì)算任務(wù)后,將計(jì)算結(jié)果返回給控制端或指定的網(wǎng)絡(luò)位置。然后,控制端對測站進(jìn)行三角剖分并建立三角網(wǎng)列表和基線向量列表,從基線向量列表中按照最短路徑原則選擇n-1條獨(dú)立基線建立獨(dú)立基線任務(wù),控制端分發(fā)獨(dú)立基線任務(wù)給網(wǎng)絡(luò)中可用計(jì)算節(jié)點(diǎn),當(dāng)所有計(jì)算節(jié)點(diǎn)完成計(jì)算任務(wù)后,控制端統(tǒng)計(jì)所有獨(dú)立基線模糊度解算成功情況,針對計(jì)算失敗的獨(dú)立基線,根據(jù)索引編號查找所屬三角網(wǎng),重新選擇替代基線,再對替代的基線進(jìn)行任務(wù)建立和任務(wù)分發(fā)與計(jì)算,直到完成所有n-1條獨(dú)立基線計(jì)算任務(wù)。相關(guān)GNSS 數(shù)據(jù)處理模塊通過調(diào)用封裝已有的商用軟件(Bernese等)或開源代碼(GPSTk等)模塊實(shí)現(xiàn)。

圖1 基于Ambizap算法的GNSS數(shù)據(jù)分布式計(jì)算流程Fig.1 Flowchart of GNSS data in a distributed Ambizap algorithm
3 算例分析
3.1 算例1
選用歐洲AJAC等23個(gè)IGS跟蹤站2002年第143天的30s采樣間隔的觀測數(shù)據(jù),比較PPP解、基于Ambizap算法的網(wǎng)解與全網(wǎng)雙差解的差異。
試驗(yàn)硬件平臺(tái)為普通組裝臺(tái)式機(jī),Intel Core i3-2100處理器,3.10GHz主頻,4GB內(nèi)存,Windows XP操作系統(tǒng)。在Visual Studio 2010環(huán)境下,采用C#語言實(shí)現(xiàn)Ambizap 算法。相關(guān)的PPP解算和雙差基線解算采用伯爾尼大學(xué)推出的高精度GNSS數(shù)據(jù)處理軟件Bernese5.0版本,在Windows平臺(tái)下,利用如下CMD 命令即可實(shí)現(xiàn)無交互的后臺(tái)調(diào)用Bern的BPE:

Ambizap算法的實(shí)現(xiàn)過程是:首選調(diào)用BPE中的PPP模塊進(jìn)行PPP 解算,然后對測站進(jìn)行Delaunay三角剖分,進(jìn)而利用Kruskal算法生成測站的最小生成樹,獲得最短基線的獨(dú)立基線,對每條獨(dú)立基線調(diào)用BPE 中的RNX2SNX 模塊進(jìn)行單基線解算,最后實(shí)現(xiàn)帶有雙差約束的PPP解的整網(wǎng)并行平差,改正測站的非差PPP解。作為對比,調(diào)用RNX2SNX 模塊對23 個(gè)測站同時(shí)進(jìn)行全網(wǎng)雙差解算。PPP 解與全網(wǎng)雙差解的坐標(biāo)差統(tǒng)計(jì)如圖2所示。

圖2 全網(wǎng)雙差解與PPP解坐標(biāo)差統(tǒng)計(jì)Fig.2 Coordinate difference statistics between double difference solution and PPP solution
由圖2可知,PPP 解與全網(wǎng)雙差解的坐標(biāo)較差在X和Z方向在1cm 以內(nèi),但在Y方向(E向)達(dá)到2cm。Ambizap網(wǎng)解與全網(wǎng)雙差解的坐標(biāo)差統(tǒng)計(jì)如圖3所示。
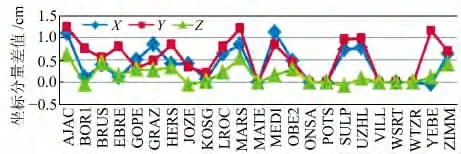
圖3 全網(wǎng)雙差解與Ambizap網(wǎng)解坐標(biāo)差統(tǒng)計(jì)Fig.3 Coordinate difference statistics between double difference solution and Ambizap solution
由圖3可知,Ambizap網(wǎng)解坐標(biāo)與全網(wǎng)雙差解坐標(biāo)的較差多在1cm 以內(nèi),相比PPP 解得到改進(jìn),尤其是Y方向和Z坐標(biāo)的改進(jìn)效果明顯。
3.2 算例2
為驗(yàn)證Ambizap算法分布式計(jì)算的高效性,搭建局域網(wǎng)分布式計(jì)算環(huán)境,針對不同規(guī)模的IGS站數(shù)據(jù),采用基于Ambizap算法建立的分布式GNSS軟件平臺(tái)與GAMIT 軟件平臺(tái)分別進(jìn)行處理。其中,方案1利用GAMIT 軟件采用雙差模式進(jìn)行集中式處理;方案2利用分布式軟件平臺(tái)進(jìn)行Ambizap算法的分布式處理。為了描述并行計(jì)算的性能,一般采用加速比指標(biāo)進(jìn)行度量。加速比定義為:
其中,n表示處理器個(gè)數(shù),T1是改進(jìn)前整個(gè)任務(wù)的執(zhí)行時(shí)間,Tn是改進(jìn)后n個(gè)節(jié)點(diǎn)并行執(zhí)行時(shí)間。分別對IGS站2013年第1天的50、99和327個(gè)測站規(guī)模的觀測數(shù)據(jù)進(jìn)行處理,數(shù)據(jù)存放在指定的FTP服務(wù)端。采用上述兩種方案進(jìn)行處理,對比計(jì)算時(shí)間。測試過程中,分布式GNSS平臺(tái)啟用局域網(wǎng)中4臺(tái)計(jì)算機(jī)組成分布式計(jì)算環(huán)境,其中一臺(tái)兼任控制端。計(jì)算機(jī)均為配置相當(dāng)?shù)钠胀ㄓ?jì)算機(jī),CPU2.2~2.4GHz,內(nèi)存2~4GB。
由表1可知,50個(gè)測站時(shí),分布式GNSS 平臺(tái)比GAMIT平臺(tái)提高2.82 倍;99個(gè)測站時(shí),GAMIT 呈幾何倍數(shù)增長,而分布式平臺(tái)呈線性增長,且加速比達(dá)到9.40倍。現(xiàn)有GAMIT 平臺(tái)無法同時(shí)處理327 個(gè)測站,而分布式平臺(tái)能在243min內(nèi)完成該計(jì)算任務(wù)。由于分布式算法和計(jì)算平臺(tái)具有良好的伸縮性、擴(kuò)展性和自動(dòng)化效果,使用更多的計(jì)算節(jié)點(diǎn)時(shí),計(jì)算效率將更高。
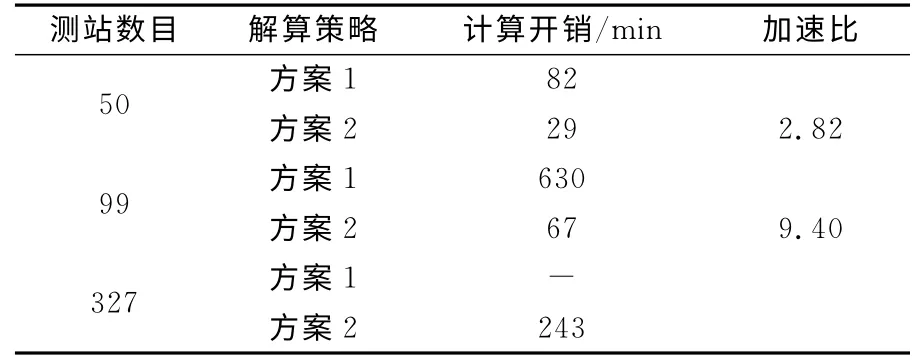
表1 計(jì)算時(shí)間的對比Tab.1 Comparison of the calculation time
4 結(jié) 語
本文基于Ambizap網(wǎng)解新算法的基本原理,提出通過利用分布式獨(dú)立基線的雙差固定解約束分布式的PPP解,進(jìn)而進(jìn)行整網(wǎng)并行計(jì)算的新方法,建立了具有良好分布特征的O(n)處理時(shí)間的整網(wǎng)分布式處理流程;利用.NET 框架下的分布式計(jì)算技術(shù)實(shí)現(xiàn)了Ambizap算法整網(wǎng)計(jì)算的分布式處理。通過算例驗(yàn)證了Ambizap 算法精度的可靠性和分布式處理的高效性,為大型GNSS網(wǎng)絡(luò)數(shù)據(jù)的快速處理提供了一條高效、經(jīng)濟(jì)的新途徑。
[1]Ge M,Gendt G,Dick G,et al.A New Data Processing Strategy for Huge GNSS Global Networks[J].Journal of Geodesy,2006,80:199-203
[2]蔡華.GNSS大網(wǎng)實(shí)時(shí)數(shù)據(jù)快速解算方法應(yīng)用研究[D].武漢:武漢大學(xué),2010(Cai Hua.Application Research of Method of Large GNSS Network Realtime Data Rapid Solution[D].Wuhan:Wuhan University,2010)
[3]Dong D,F(xiàn)ang P,Bock Y,et al.Anatomy of Apparent Seasonal Variations from GPS-Derived Site Position Time Series[J].Journal of Geophysical Research,2002,107(B4):2 075
[4]Herring T.Aspects of Large Station Networks for GPS Orbits and Clocks[C].IGS Workshop and Symposium,Switzerland,2004
[5]Blewitt G.Fixed Point Theorems of GPS Carrier Phase Ambiguity Resolution and Their Application to Massive Network Processing:Ambizap[J].Journal of Geophysical Research,2008,113:B12 410
[6]陳俊平,張益澤,謝益炳,等.超大觀測網(wǎng)絡(luò)及多GNSS系統(tǒng)的快速數(shù)據(jù)處理[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2014,39(3):253-257(Chen Junping,Zhang Yize,Xie Yibing,et al.Rapid Data Processing of Huge Networks and Multi-GNSS Constellation[J].Geomatics and Information Science of Wuhan University,2014,39(3):253-257)
[7]程傳錄,蔣光偉,聶建亮,等.利用雙差的超大GNSS基準(zhǔn)站網(wǎng)解算法改進(jìn)[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2014,39(5):596-599(Cheng Chuanlu,Jiang Guangwei,Nie Jianliang,et al.Improving the Processing Strategy Based on Double-Differenced Observations for Huge GNSS Network[J].Geomatics and Information Science of Wuhan University,2014,39(5):596-599)
[8]陳永奇,劉焱雄,王曉亞,等.香港實(shí)時(shí)GPS水汽檢測系統(tǒng)的若干關(guān)鍵技術(shù)[J].測繪 學(xué)報(bào),2007,36(1):9-12(Chen Yongqi,Liu Yanxiong,Wang Xiaoya,et al.GPS Real-Time Estimation of Precipitable Water Vapor-Hong Kong Experiences[J].Acta Geodaetica et Cartographica Sinica,2007,36(1):9-12)
[9]Zumberge J F,Jefferson D C.Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks[J].Journal of Geophysical Research,1997,102:5 005-5 017
[10]Blewitt G,Hammond W,Kreemer C,et al.From Yucca Mountain Local Stability to Global Quaking:GPS Point Positioning Strategies Spanning the Spatio-Temopral Spectrum[C].Advances in GPS Data Processing and Modeling for Geodynamics,London,2005
[11]Blewitt G.The Fixed Point Theorem of Ambiguity Resolution for Precise Point Positioning of GPS Networks:Theory and Application[C].2006 AGU Fall Meeting,San Francisco,USA,2006
[12]Boomkamp H.Global GPS Reference Frame Solutions of Unlimited Size[J].Advances in Space Research,2010,46:136-143
[13]Serpelloni E,Casula G,Galvani A,et al.Data Analysis of Permanent GPS Networks in Italy and Surrounding Regions:Application of a Distributed Processing Approach[J].Annals of Geophysics,2006,49(4/5):897-928
[14]陳憲冬.Ambizap方法在大規(guī)模GPS網(wǎng)處理中的應(yīng)用及結(jié)果分析[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2011,36(1):10-13(Chen Xiandong.Application of Ambizap Algorithm in Large GPS Network and Its Test Results[J].Geomatics and Information Science of Wuhan University,2011,36(1):10-13)
