IBIS-L系統與TM30全站儀在邊坡變形監測中的對比分析
2015-02-15 01:08:14余紅楚左小清字陳波徐小坤王利啟劉海波
大地測量與地球動力學 2015年4期
余紅楚 左小清 字陳波 徐小坤 王利啟 劉海波
1 昆明理工大學國土資源工程學院,昆明市文昌巷68號,650093
2 華能瀾滄江水電有限公司,昆明市世紀城中路1號,650214
傳統水電站邊坡變形監測技術主要包括水準儀、全站儀及測量機器人等。水準儀精度高,但在陡峭的邊坡受到觀測高差的限制,難以施測。采用全站儀和測量機器人需要在邊坡上埋設大量觀測墩,人力資源成本高,前期準備周期長,后期需要對每個觀測墩的數據進行計算整理[1]。IBIS-L系統獲取監測區域的二維影像,利用合成孔徑技術和步進頻率連續波技術實現雷達影像方位向和距離向的高分辨率,通過比較不同時間影像中目標點的電磁波相位信息,采用干涉技術求取監測區域的變形量,實現優于mm 級的微變形監測[2-3]。本文對IBIS-L系統為期一個月的大型水電站邊坡監測數據進行分析,并與TM30全站儀進行變形監測精度對比。
1 試驗方案與數據處理
1.1 試驗方案
試驗在某水電站邊坡進行。選取位于不同邊坡上的3個監測點進行對比分析,其中包含兩個自動觀測點和一個人工觀測點。
TM30全站儀監測頻率為4d測量一次,監測周期30d。利用水電站提供的GPS基準網中的控制點作為監測基準點。數據采集完成后先進行儀器常數改正、氣象改正和傾斜改正等距離改正,再計算監測點坐標。
IBIS-L系統安置在邊坡對岸的簡易棚內。試驗中IBIS-L系統的測點無法直接與邊坡已有的TM30全站儀監測點相重合,所以為了方便對比分析,在TM30全站儀監測點旁安置角形反射器,以便準確識別全站儀監測點的位置。IBIS-L系統24h實時監測,一次采樣時間為6min。
1.2 監測數據處理
1.2.1 TM30全站儀數據處理
TM30全站儀測量采用08-12、08-15、08-21和08-25觀測值的均值作為初值,計算之后每期的三維位移向量。由于IBIS-L 系統測量的是儀器視線方向位移,必須進行投影變換。采用TM30全站儀測出IBIS-L系統中心的三維坐標,計算視線向量。設向量A=(X1,Y1,Z1),B=(X2,Y2,Z2),則A向 量 在B向 量 上 的 投 影 為。據此,計算TM30 監測的三維位移向量在IBIS-L系統視向的投影,并計算累積位移(表1、2)。
1.2.2 IBIS-L系統監測數據處理
1)數據定標和聚焦處理
IBIS-L系統獲得一維信號數據,對數據進行定標和聚焦處理,得到距離向分辨率0.5m、方位向分辨率4.4mrad的二維扇形圖像[4]。
2)干涉處理
通過設定閾值(強度值或相干系數)去掉質量不好的點,保證干涉圖像的可靠性[5]。對數據進行干涉處理,首先選擇一個主影像,然后分別和剩余的影像進行干涉。干涉后,可以設定合適的濾波窗口對干涉圖進行濾波處理,除去噪聲的影響,保證相位的連續性,加快解纏的速度[6]。濾波結束后可以對濾波后的影像進行相位解纏,獲得真實的距離相位[7]。
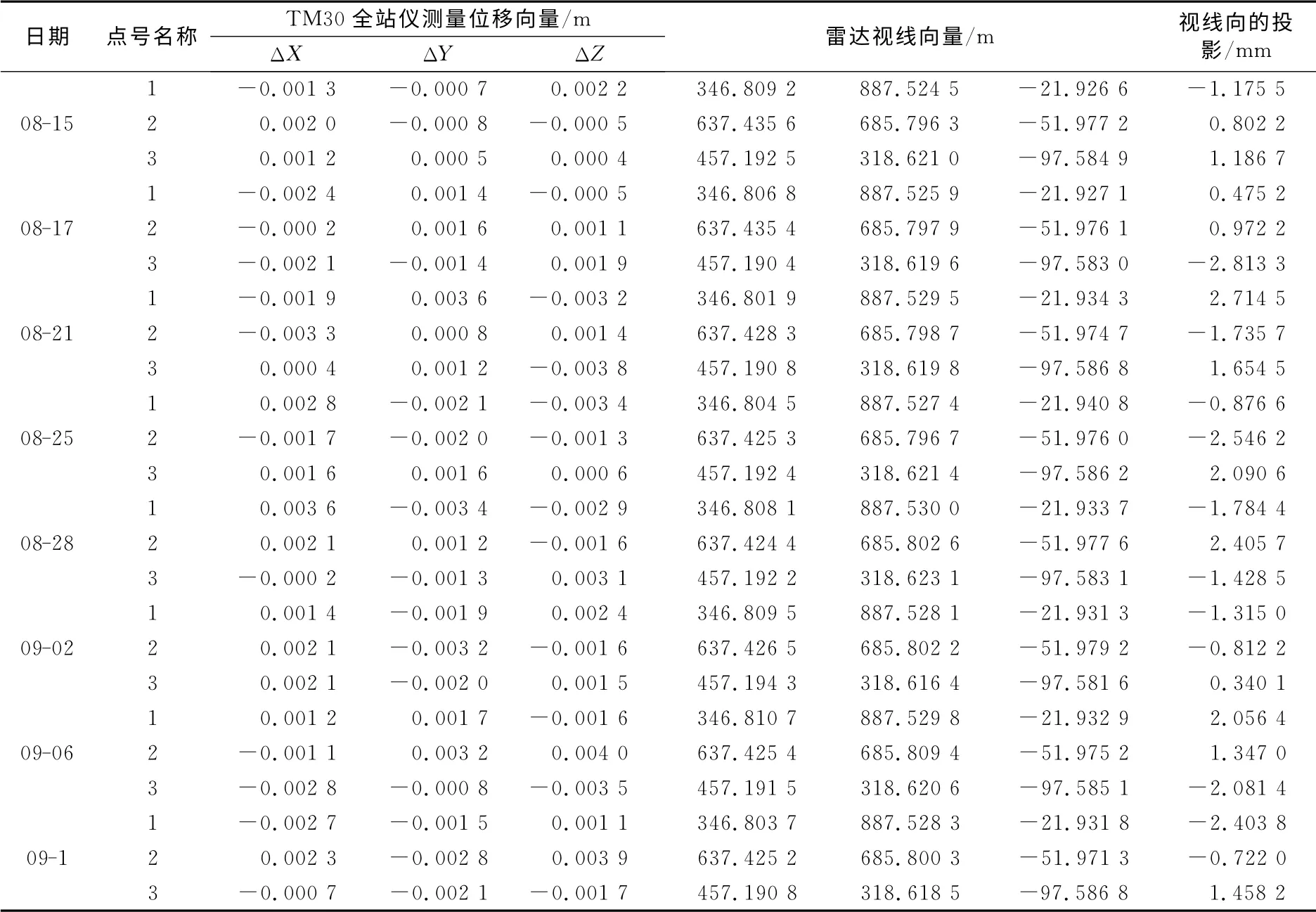
表1 TM30全站儀三維位移在雷達視向投影計算表Tab.1 The projection calculation table of three-dimensional total displacement acquired by TM30total station in the radar sight direction

表2 TM30全站儀在雷達視線方向的累積位移計算表Tab.2 Calculative displacement of TM30total station monitoring in the radar sight direction
3)差分處理
對干涉圖進行兩兩差分處理,獲得不同時刻距離向相位變化值。把差分獲得的相位轉換為距離值,得到位移量。
4)誤差校正
地面雷達觀測的誤差主要為視向形變誤差,包括干涉相位誤差和系統工作頻率偏移,干涉相位誤差包括大氣干擾相位誤差、干涉相位噪聲和散射體去相干。試驗中,監測周期為30d,系統頻率能維持穩定,系統的頻率偏移極其微小,其誤差在0.01mm 內,可以忽略不計。散射體具有高相關性,散射體去相干可以忽略[8]。
大氣水汽含量在時間空間上的變化引起的雷達信號延遲是雷達干涉測量中不可忽視的誤差[9]。根據雷達圖像的熱信噪比、估計信噪比、相關性值和位移曲線,結合實地情況,選擇熱信噪比高、估計信噪比高、相關性值接近1,且位移量在誤差范圍內的點作為GCP 點(地面控制點)。GCP點相位變化只受環境變化影響。采用單個GCP點或多個GCP點加權平均的方式對觀測墩所在的像素點進行校正,從而得到像素點的真實位移。例如,點位1經過GCP點校正后的位移變化如圖1所示,從圖上看,位移變化在1mm 之內波動。這是因為GCP 點和觀測點位在雷達圖像上處在不同的像元,GCP點受環境的影響不能完全反映觀測點位微波路徑上的情況,校正后存在一定的誤差。
IBIS-L系統是連續觀測,TM30全站儀是非連續的,監測周期為4d一次,位移量是觀測當天某一時段或某一時刻的觀測值,故選取IBIS-L系統相應觀測日期的平均位移量與TM30 全站儀監測值進行比較。從IBIS-L 系統觀測數據中提取出08-15、08-17、08-21等的位移量,計算它們每天的平均位移量和累積位移量(表3、4)。
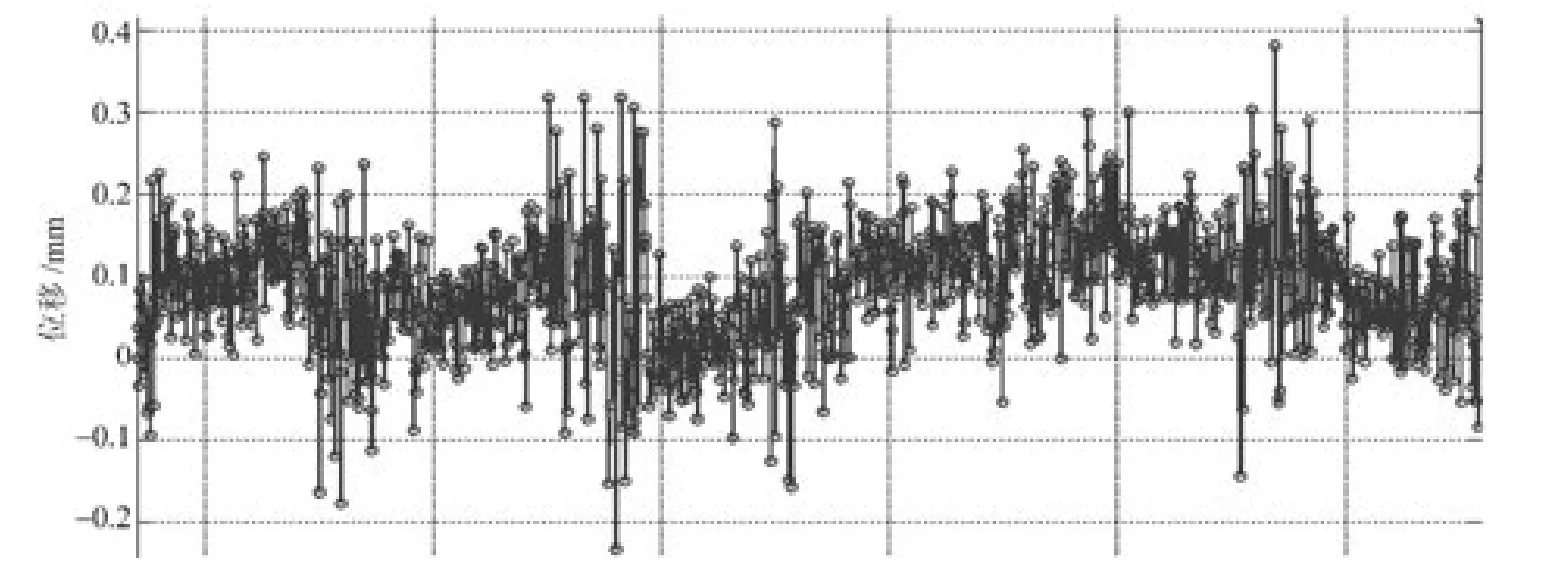
圖1 點位1經GCP點校正后的位移變化圖Fig.1 The displacement change graph of point one after GCP points correction
2 精度對比分析
根據TM30全站儀和IBIS-L 系統在雷達視線方向監測的累積位移值,繪制圖2、3。
由圖2看出,TM30全站儀測量每個點的累積位移都在±3 mm 內波動,呈不規則分布。這是因為水電站邊坡都比較穩定,30d內形變值在1~2 mm 左右,而由于觀測距離較遠,約1km,TM30全站儀觀測時受環境和視差等影響較大,誤差在mm 級,無法監測出2~3mm 的位移值。
由圖3看出,IBIS-L系統監測誤差在±1mm之內波動,但能監測出mm 級的形變趨勢,所以點2不存在形變,點1在雷達視線方向呈現遠離形變趨勢,點3在雷達視線方向呈靠近形變趨勢。點位1和點位3處在不同的邊坡,實際位移方向與雷達視線方向的夾角不同,實際位移在雷達視線方向的投影有正有負,呈靠近IBIS-L系統或遠離IBIS-L系統趨勢。
采用高次曲線擬合和多項式擬合,對點位1和點位3的30d雷達觀測數據進行分析,擬合曲線如圖4所示。點位1呈倒指數曲線圖形,點位3呈雙曲線圖形。

表3 IBIS-L系統監測位移計算表Tab.3 The displacement calculation table of IBIS-L system monitoring

表4 IBIS-L系統監測累積位移計算表Tab.4 The cumulative displacement calculation table of IBIS-L system monitoring
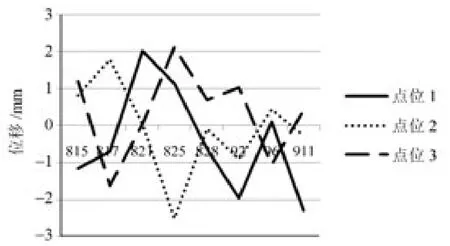
圖2 TM30全站儀測量累積位移折線圖Fig.2 The cumulative displacement line graph of TM30total station measuring
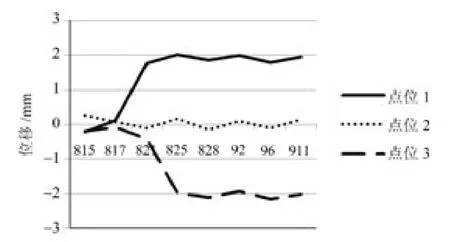
圖3 IBIS-L系統監測累積位移折線圖Fig.3 The cumulative displacement line graph of IBIS-L system monitoring
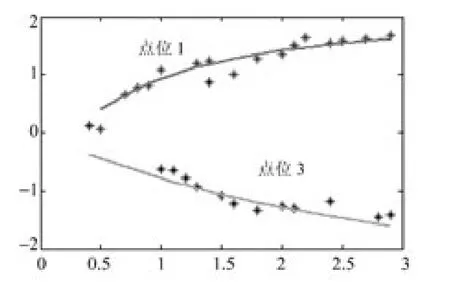
圖4 IBIS-L系統監測高次曲線擬合圖Fig.4 The high-order curve fitting chart of IBIS-L system monitoring
3 結 語
本文對IBIS-L 系統和TM30全站儀在水電站邊坡長時間微變形監測中的精度進行對比研究。結果表明,IBIS系統能監測出雷達視線方向mm 級形變,精度優于TM30全站儀,可以實現遠距離、高精度、大范圍、連續的水電站邊坡變形監測。然而,由于IBIS-L系統只能獲得雷達視線向的位移,難以得出具體的實際形變方向和形變量,如何獲得實際的三維變形信息需要進一步的研究。
[1]徐亞明,周校,王鵬,等.地基雷達干涉測量的環境改正方法研究[J].大地測量與地球動力學,2013,33(3):41-43(Xu Yaming,Zhou Xiao,Wang Peng,et al.Environmental Correction Methods for Ground-Based Radar Interferometry Measuring[J].Journal of Geodesy and Geodynamics,2013,33(3):41-43)
[2]王鵬,周校.地基SAR 干涉測量原理及其形變監測應用研究[J].測繪信息與工程,2012,37(4):22-28(Wang Peng,Zhou Xiao.Ground-Based SAR Interferometry Principles and Its Applications to Displacement Monitoring[J].Journal of Geomatics,2012,37(4):22-28)
[3]R?delsperger S,L?ufer G,Gerstenecker C,et a1.Monitoring of Displacements with Ground-Based Microwave Interferometry:IBIS-S and IBIS-L[J].Journal of Applied Geodesy,2010(4):41-54
[4]Luzi G,Noferini L.Using a Ground Based SAR Interferometer and a Terrestrial Laser Scanner to Monitor a Snow-Covered Slope:Results from an Experimental Data Collection in Tyrol(Austria)[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(2):382-393
[5]Iannini L,Monti Guarnieri A.Atmospheric Phase Screen in Ground-Based Radar:Statistics and Compensation[J].Geoscience and Remote Sensing Letters,2011,3(8):537-541
[6]刁建鵬,梁光勝.地面雷達的位移監測試驗研究[J].測繪科學,2011,36(2):62-64(Diao Jianpeng,Liang Guangsheng.Experimental Study on Monitoring Displacement by Ground-Based Radar[J].Science of Surveying and Mapping,2011,36(2):62-64
[7]黃其歡,張理想.基于GB-InSAR 技術的微變形監測系統及其在大壩變形監測中的應用[J].水利水電科技進展,2011,31(3):84-87(He Qihuan,Zhang Lixiang.Ground-Based Synthetic Aperture Radar Interferometry and Its Aapplication to Deformation Monitoring[J].Hydraulic and Hydroelectricity Science Technology Progress,2011,31(3):84-87)
[8]Ferretti A,Claudio P,Rocca A.Permanent Scatters in SAR Interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(1):8-20
[9]華遠峰,李連友,胡伍生,等.地面雷達靜態微變形測量環境影響改正方法研究[J].東南大學學報:自然科學版,2013,43(18):428-432(Hua Yuanfeng,Li Lianyou,Hu Wusheng,et al.Environment Correction Methods of Static Micro-Deformation Surveyed by Ground-Based Radar[J].Journal of Southeast University:Natural Science Edition,2013,43(18):428-432)
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52