并聯混合動力汽車起動過程中PMSM混沌現象及其控制研究
2015-02-17 09:16:17陸文昌李賽賽袁朝春王若飛
重慶理工大學學報(自然科學) 2015年9期
陸文昌,李賽賽,袁朝春,陳 龍,王若飛
(1.江蘇大學,江蘇 鎮江 212013; 2.奇瑞新能源汽車技術有限公司,安徽 蕪湖 241002)
并聯混合動力汽車起動過程中PMSM混沌現象及其控制研究
陸文昌1,李賽賽1,袁朝春1,陳 龍1,王若飛2
(1.江蘇大學,江蘇 鎮江 212013; 2.奇瑞新能源汽車技術有限公司,安徽 蕪湖 241002)
在并聯混合動力汽車以電機起動的過程中,驅動電機(永磁同步電機)處于突然加載的工況,當電機參數在一定范圍內時,電機會產生混沌現象。并聯混合動力汽車的驅動電機出現混沌現象,不但對自身的壽命以及輸出特性產生不利影響,而且在電機與車輛傳動系統結合后,也會把這種極其不穩定的輸出傳遞到整車驅動系統中,最終會引起更加復雜、不穩定運動的產生。應用ADVISOR2002軟件,在ECE-EUDC循環工況下,探討了永磁同步電機的溫度變化對電機定子電阻RS、繞組電感L、轉子永磁體磁鏈ψr的影響。針對電機以上3個參數對整個電機混沌系統的影響,基于狀態反饋和模糊控制理論設計了模糊反饋混沌控制器。仿真結果表明:整車沖擊度J由最大值0.02降到0.001(m/s3)。最后通過硬件在環(HIL)試驗,驗證了所設計控制器的有效性。
并聯混合動力汽車;永磁同步電機;混沌控制;整車沖擊度;硬件在環
并聯混合動力汽車的動力主要來源于內燃機、電動機以及能量儲備裝置,通過研發過程中的匹配和優化控制策略設計,結合傳統汽車與純電動汽車的優點,最終能夠達到降低污染和保證整車動力性的目標。本文以某并聯型混合動力汽車為例進行研究。該并聯型混合動力汽車驅動電機為永磁同步電機(PMSM),在由驅動電機提供啟動力矩的過程中,當電機自身參數處于一定范圍內時,電機會產生混沌現象。文獻[1]提出了控制PMSM混沌現象的脈沖控制方法,然而此控制方法不夠靈活;文獻[2]提出了永磁同步電機混沌現象微分幾何的控制方法,但在工程上不易實現; Jackson等[3]采用納入軌道和強迫遷徙控制PMSM中的混沌現象,但在工程中難以實現控制目標;Ott等[4]提出OGY方法,但其中參數的調整比較繁瑣,且人為因素起到了主導作用,導致無固定模式可以采用。由于電機的混沌現象導致的驅動電機不規則輸出,最終會使整車在啟動過程產生縱向沖擊,影響整車的平順性。目前針對驅動電機混沌現象對整車平順性影響的研究還很少。針對上述問題,提出一種將模糊控制與狀態反饋控制相結合的控制器,從電機啟動提供整車啟動力矩時開始控制電機混沌運動,實現了在啟動過程中對驅動電機混沌現象的控制,從而改善了由于電機混沌現象而引起的整車沖擊度較大的情況。以整車沖擊度J評價驅動電機混沌現象的控制對整車平順性的影響,并通過硬件在環(HIL)試驗驗證控制器的合理性。
1 整車以電動機啟動時電機的混沌現象
并聯式混合動力汽車主要有純電動機驅動、內燃機驅動、電動機內燃機并行驅動、行車充電、能量回饋等工作運行方式。為降低整車油耗和減少尾氣排放,本研究的整車動力總成協調采用邏輯門限控制策略。圖1為該控制策略的邏輯流程[5-6]。
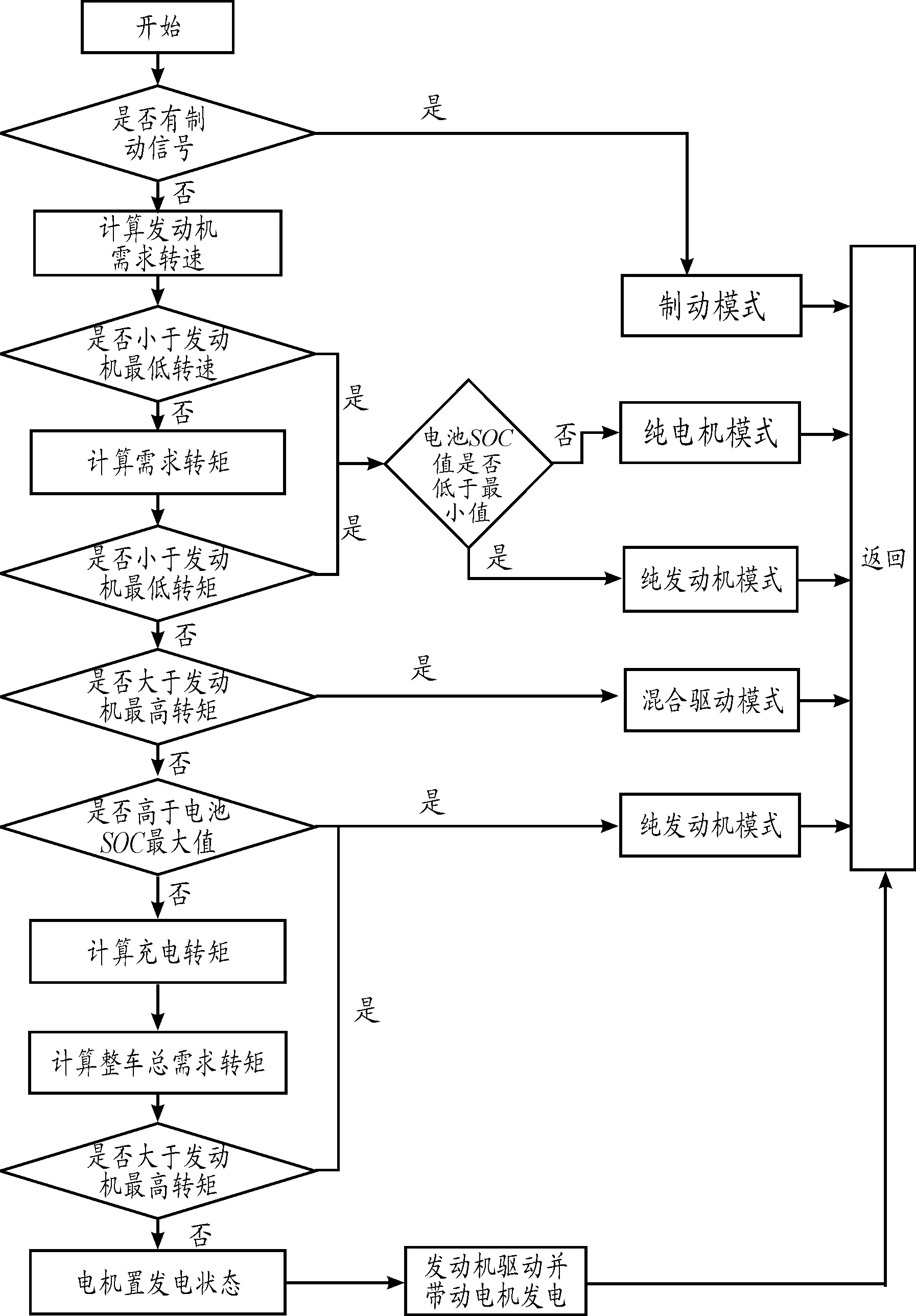
圖1 整車動力總成協調控制策略的邏輯流程
在圖1所示的控制策略中,首先要判斷整車是否有制動信號。當整車處于啟動或低載工況時,若判斷出發動機需求轉速低于發動機最低轉速或需求轉矩低于發動機最低轉矩,且電池SOC高于其最小值時,為了避免發動機工作在低效率區域,整車進入純電機模式,由電動機單獨提供力矩。根據圖1所示的整車動力總成協調控制策略,本文研究的并聯混合動力汽車是以PMSM驅動電機提供整車啟動力矩的。
為保證并聯混合動力汽車以電機啟動過程的平順性,關鍵是能夠將已經發生混沌現象的電機又快又好地控制到穩定狀態。
本文整車驅動電機為表貼式永磁同步電機(PMSM),其輸入電壓為幅值為220 V的三相電壓Ua,Ub,UC。由A-B-C靜止坐標系與d-q旋轉坐標系之間的關系,并通過仿射變換和時間變換,得到電機在兩相旋轉d-q坐標系下的數學模型[7]:
(1)

本文所用電機參數設定如下:電機功率為58 kW,起始定子電阻Rs=0.9 Ω,Ld=Lq=0.014 25 H,J=0.000 047 kg·m2,ψr=0.031 Wb,np=1,B=0.016 2 N·m·rad/s 。根據永磁同步電機發生混沌現象的條件,當γ>γh=σ(σ+4)/(σ-2)時,電機處于混沌區域范圍內,會產生混沌現象。

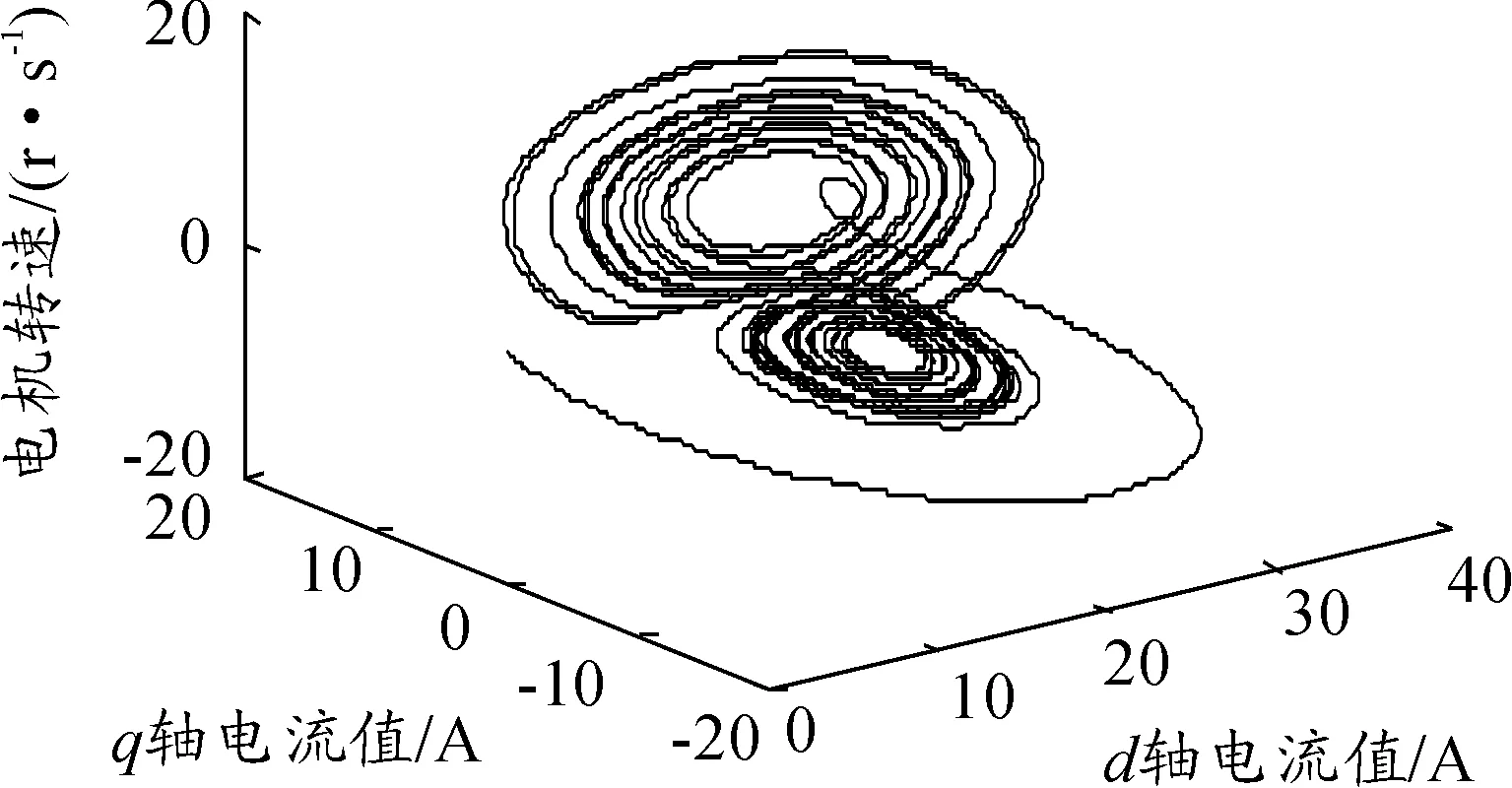
圖2 電機啟動時的混沌吸引子
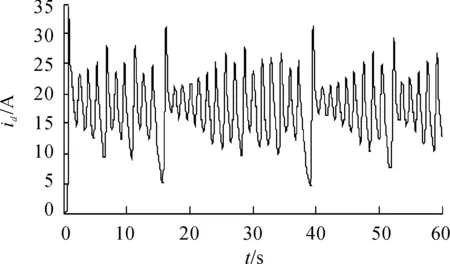
圖3 車輛起步時電機的d軸電流id
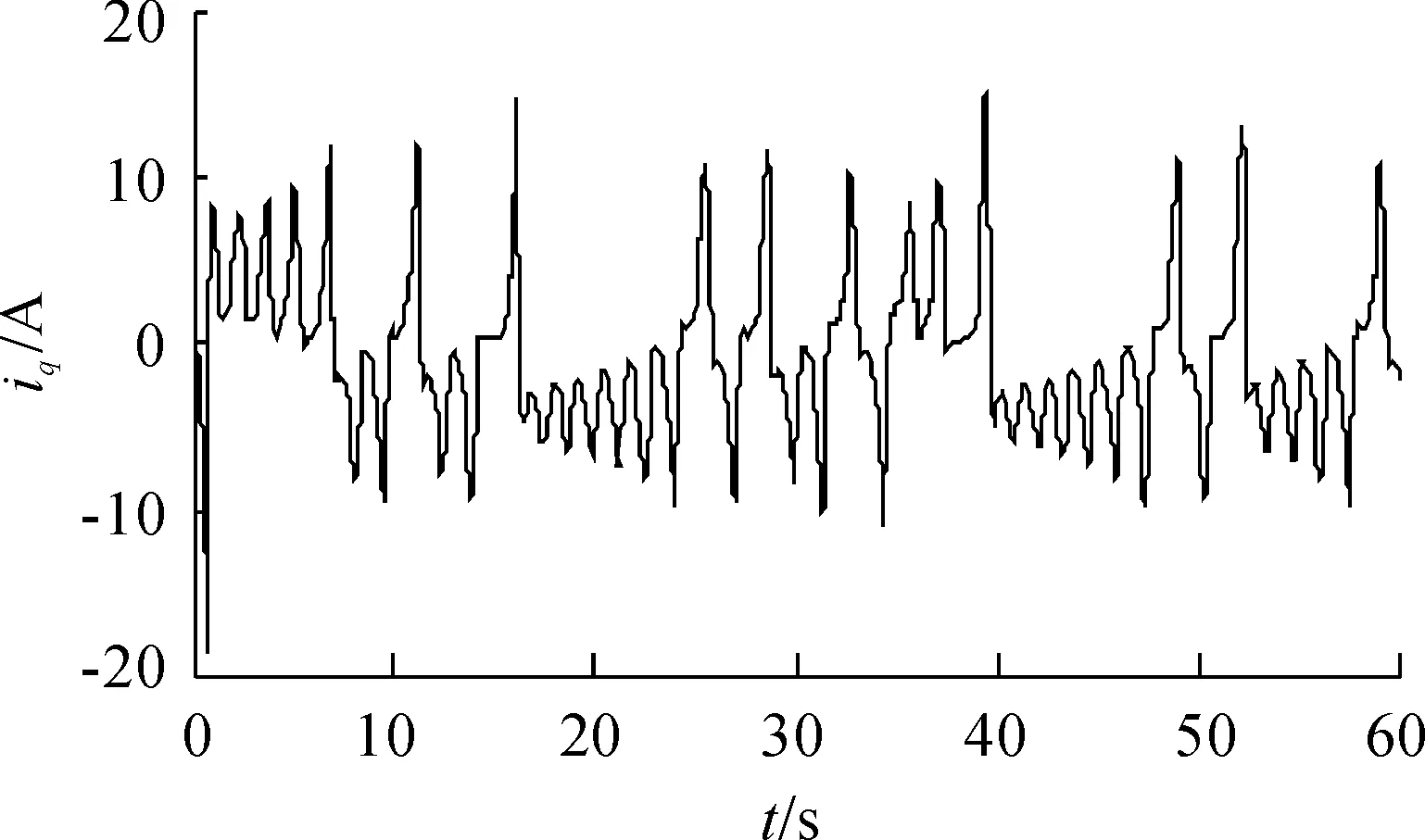
圖4 車輛起步時電機的q軸電流iq
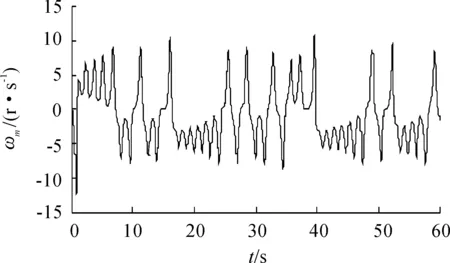
圖5 車輛起步時電機轉速ωm
從圖2~5可以看出:當車輛由電動機提供啟動力矩時,電機的d-q軸電流以及輸出轉速ωm發生不規則、無序的振蕩,并且出現混沌吸引子。電機的混沌運動不會隨著時間而停止,倘若沒有加入控制,會一直持續運動。
2 驅動電機PMSM在ECE-EUDC循環工況下行駛時自身參數的變化
整車啟動時,電機開始工作。隨著電機的運行,電機自身的溫度也會逐漸升高,最終會使電機自身參數σ與γ發生改變,這會對電機混沌現象的控制產生影響。本文在軟件ADVISOR2002中建立該并聯混合動力汽車模型,在ECE-EUDC循環工況下考察電機自身溫度的變化趨勢。
ADVISOR2002是以Matlab和Simulink為基礎,包含一系列模型、數據和腳本文件的分析軟件。在ADVISOR2002中,用戶可以根據軟件已經存在的模型進行模型的修改從而直接使用;也可以在此基礎上進行二次開發,建立適合自己的模型進行分析[9]。在ADVISOR2002中,設定整車結構類型和行駛工況。運行仿真模型,得到如圖6所示的電機運行溫度結果,其中:橫坐標表示電機運行時間(s);縱坐標為電機溫度(℃)。

圖6 電機運行溫度結果
根據圖6所示的運行結果,采用最小二乘法進行曲線擬合[10],取擬合形式為y=a0+a1x。
在永磁同步電機(PMSM)中,永磁同步電機定子電阻隨溫度變化的關系如式(2)所示。
(2)

(3)
(4)
(5)
(6)
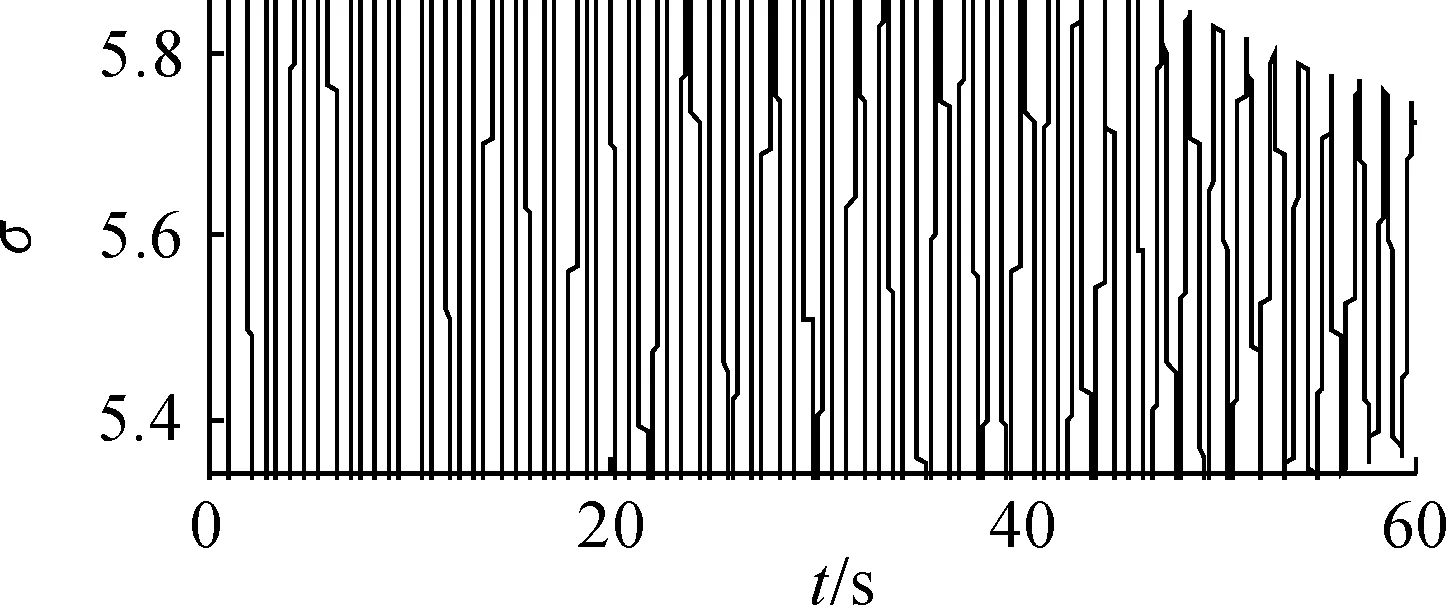
圖7 電機參數σ變化規律
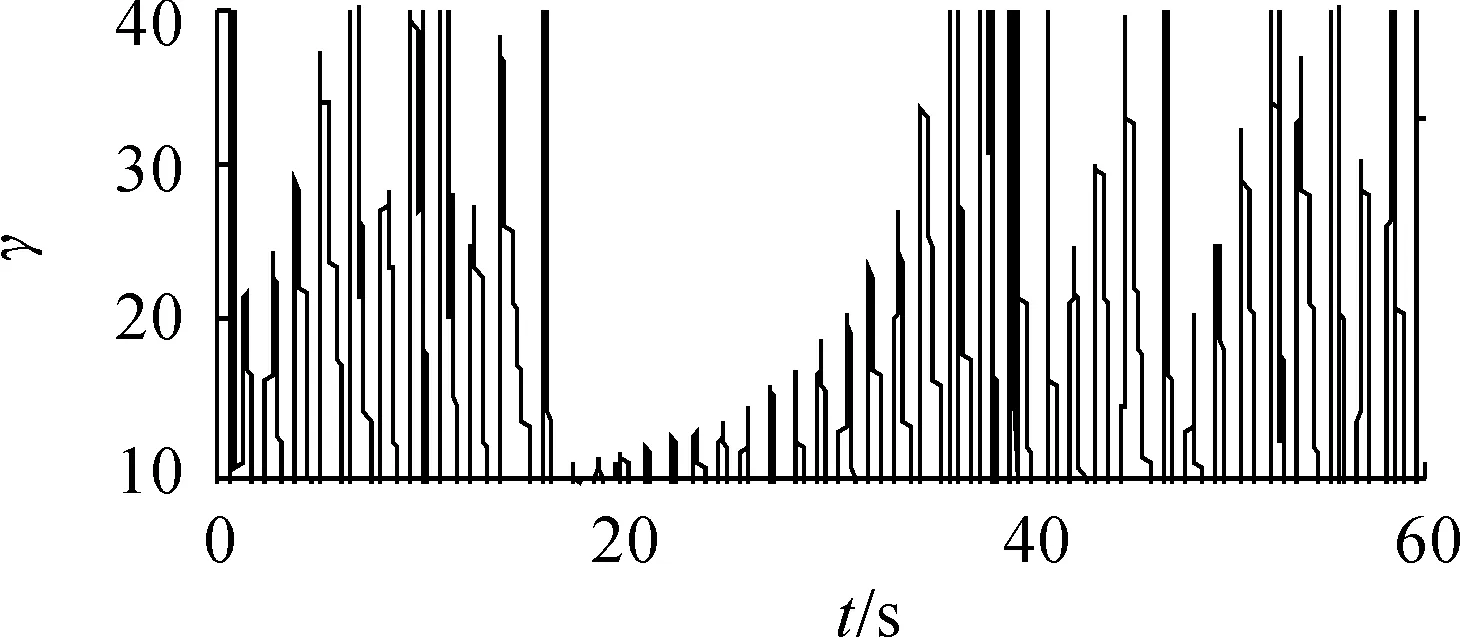
圖8 電機參數γ變化規律
從圖7,8中可以看出:根據Routh-Hurwitz定律,由電機發生混沌現象的條件:γ>γh=σ(σ+4)/(σ-2),可知電機處于混沌區域范圍內,會產生混沌現象。
3 驅動電機混沌現象的控制
模糊控制的優點是使用自然語言,不需要被控對象的精確數學模型,魯棒性良好,能夠適應較大范圍的參數變化。模糊數據和規則庫、模糊器、模糊推理和解模糊器共同組成了模糊控制系統。模糊控制過程分為模糊化、模糊邏輯推理和解模糊判斷3個步驟[13],如圖9所示。反饋控制和模糊控制結合在一起,其基本原理如圖10所示。
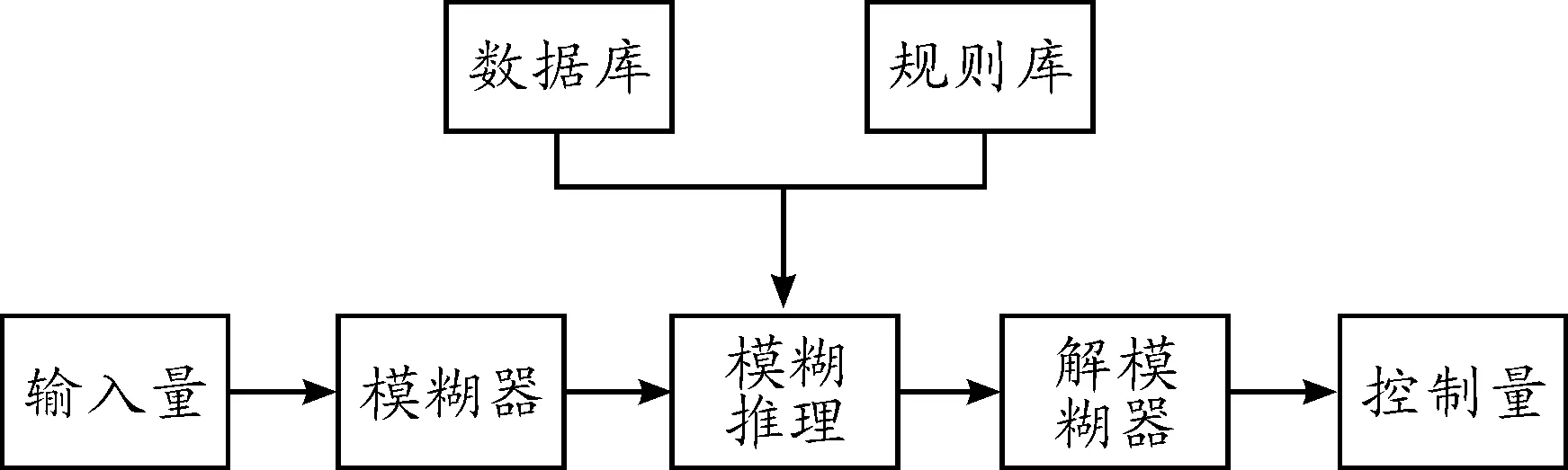
圖9 模糊控制器結構
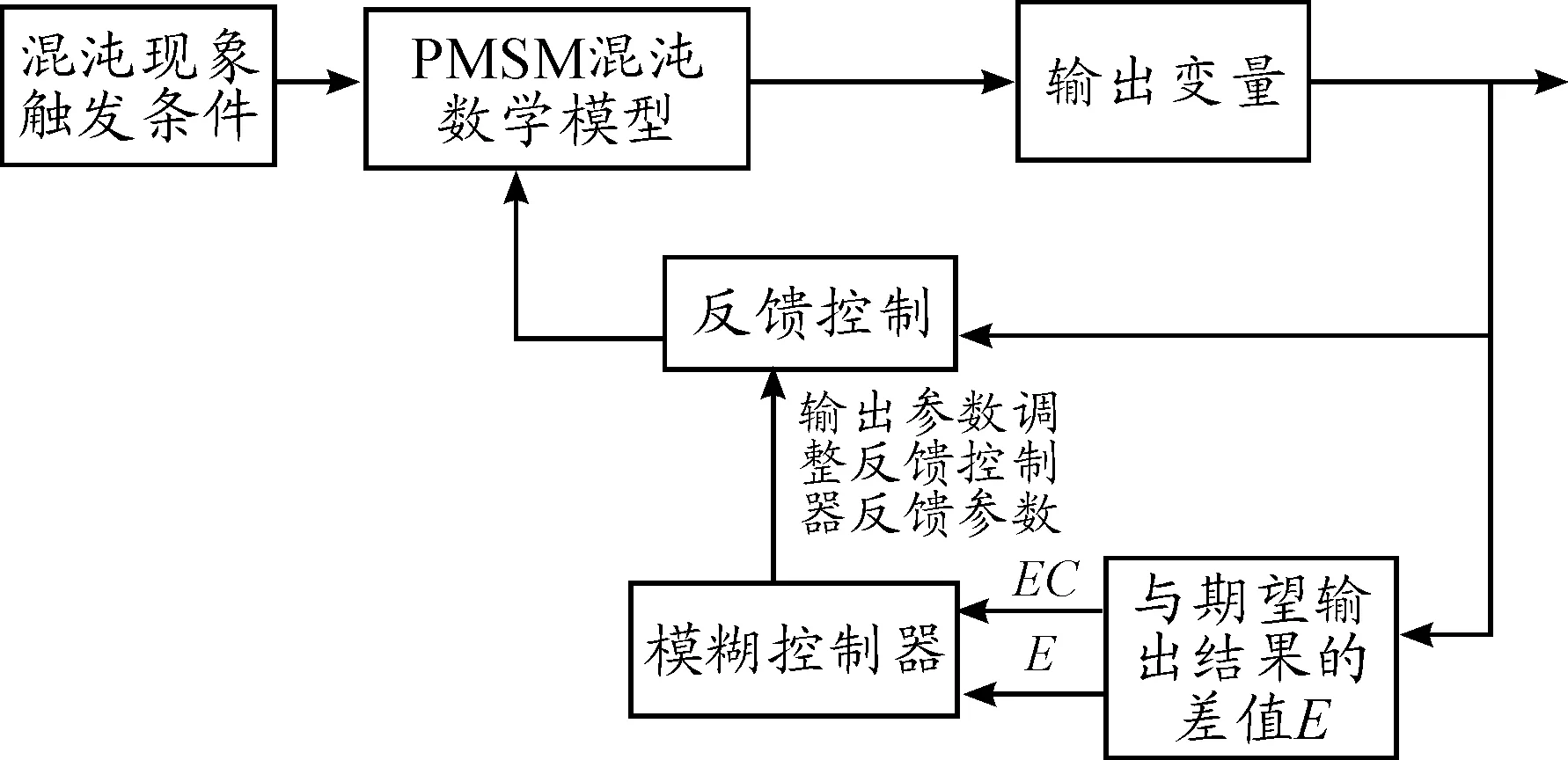
圖10 模糊反饋控制參數整定基本模型
模糊控制器以輸出量與期望值的誤差E和誤差變化率EC為輸入[14](各輸出量id,iq,ωm的誤差變化率分別表示為Did,Diq,DWm),控制參數Kid,Kiq,KWm為輸出。利用模糊控制器的輸出值對反饋控制參數進行調整,便構成了模糊反饋控制器。選擇誤差E和誤差變化率EC的語變量值為{NB,NM,NS,Z,PS,PM,PB},量化因子分別為0.04和0.01。輸出語言變量為Kid,Kiq,KWm,其取值也為{NB,NM,NS,Z,PS,PM,PB},比例因子為0.5。建立Kid,Kiq,KWm的模糊規則,并給出Kid,Kiq,KWm的非線性對應關系,如圖11~13所示。
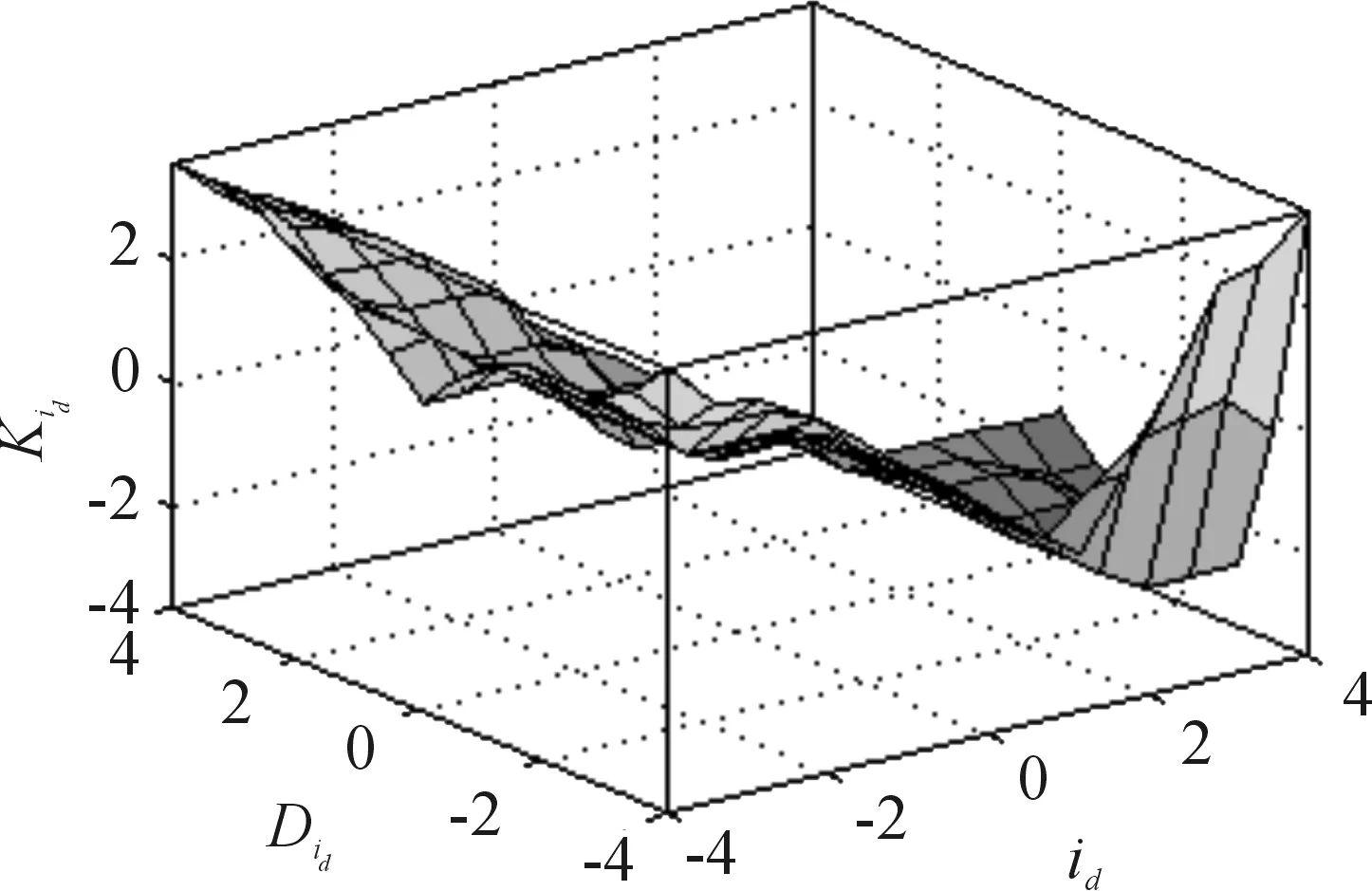
圖11 Kid的模糊推理規則輸出曲面
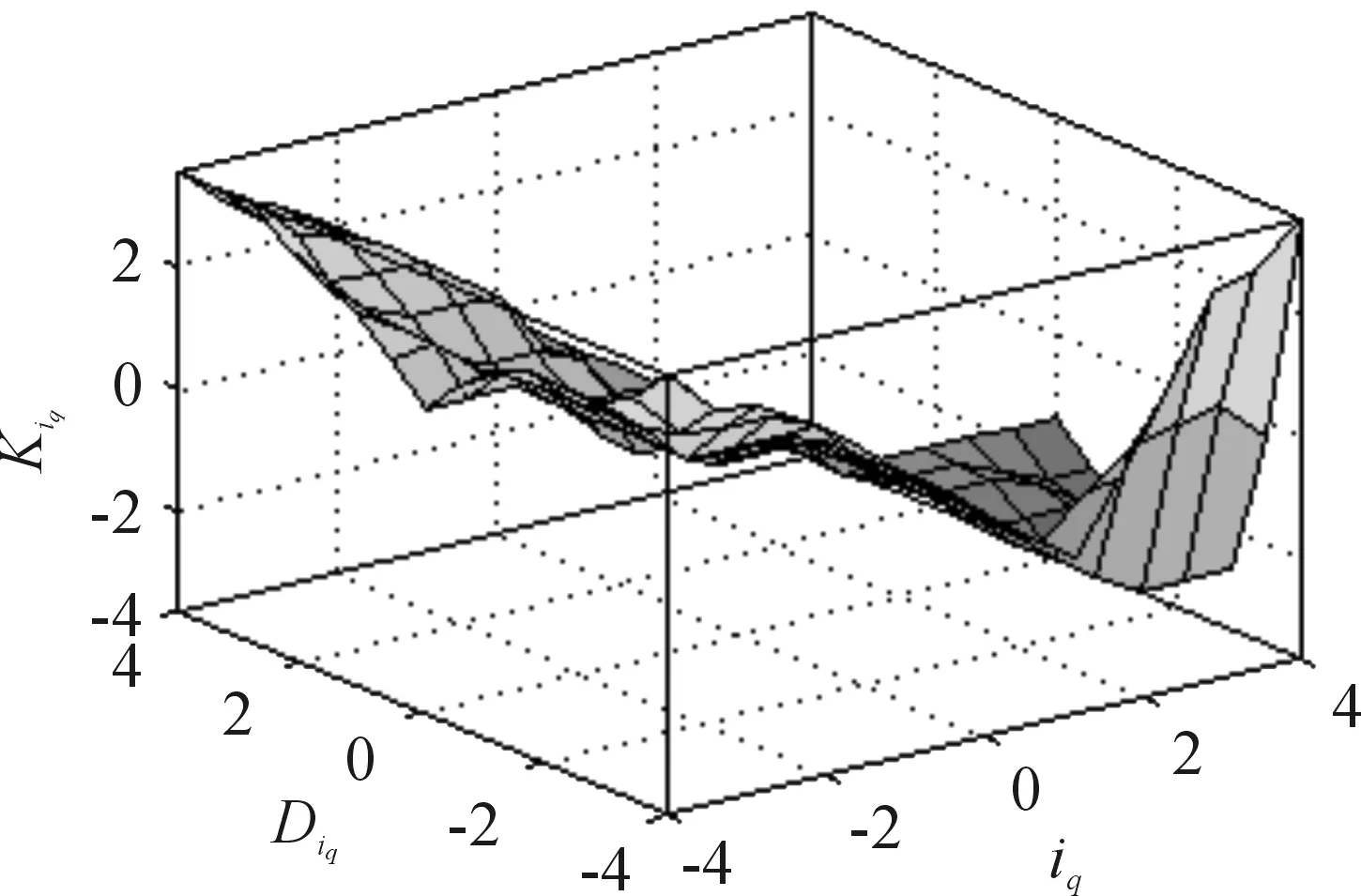
圖12 Kiq的模糊推理規則輸出界面

圖13 KW的模糊推理規則輸出曲面
并聯混合動力汽車以電動機起步時加入該模糊反饋控制器,整車工作在循環工況ECE-EUDC下。電機仿真結果(為方便研究,電機出現混沌現象后,在第20s時施加控制器)見圖14~16。
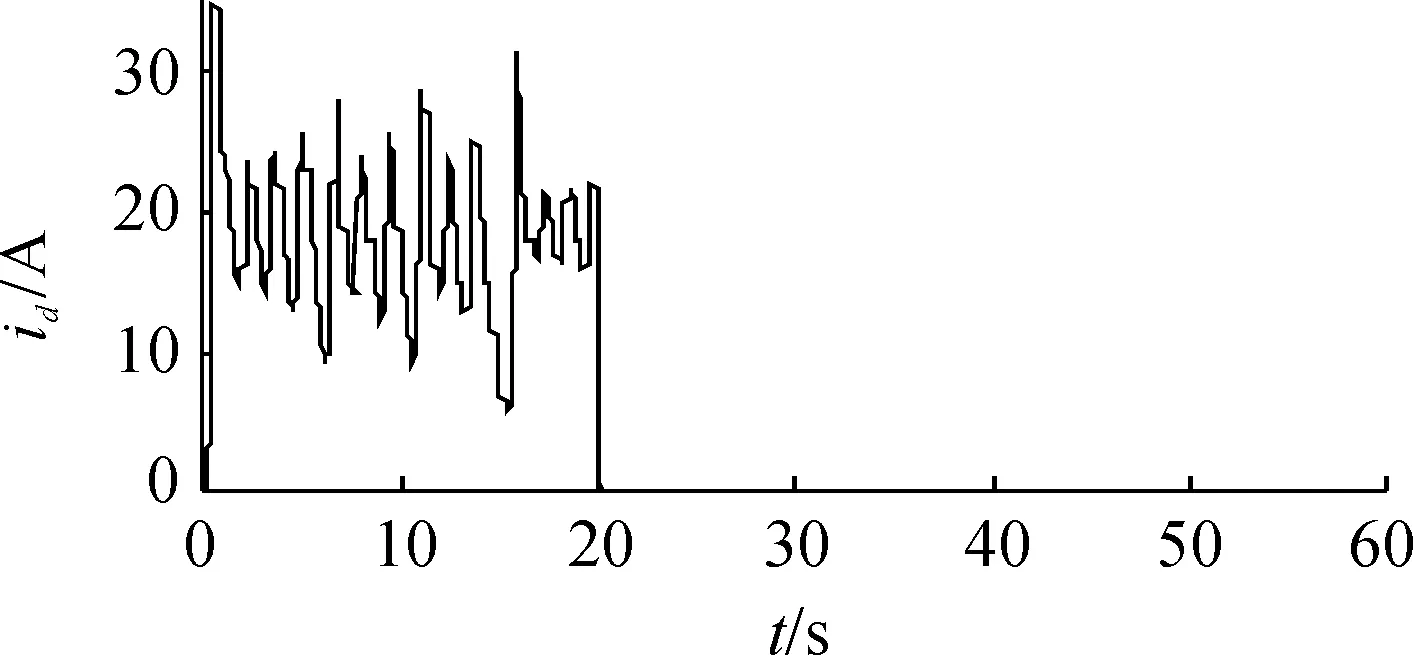
圖14 控制后的電機d軸電流id
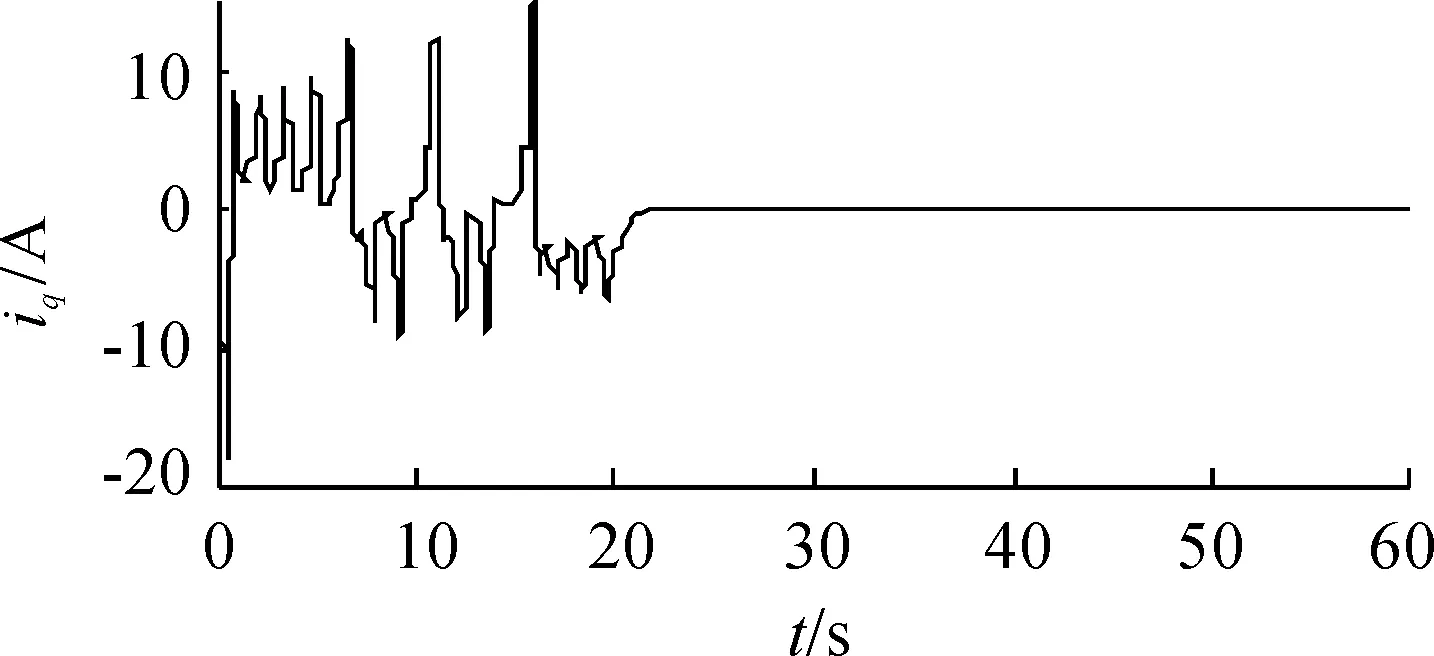
圖15 控制后的電機q軸電流iq
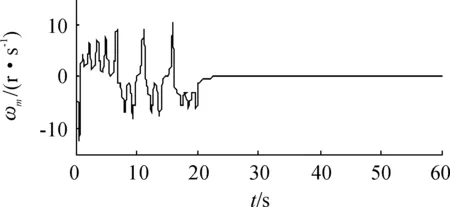
圖16 控制后的電機轉速ωm
從圖14~16中看出:此混沌控制器能夠使電機的混沌現象得到較好的控制,并穩定在平衡點(0,0,0)附近,大大降低了電機的混沌無規則波動,符合車輛實際運行中對驅動電機穩定性的要求。
4 電機混沌現象控制對整車啟動平順性的影響
在整車起步過程中,驅動電機提供力矩,而驅動電機的混沌輸出將會對整車的啟動性能產生影響。為評價對并聯混合動力汽車驅動電機混沌現象的控制對整車啟動平順性的影響,本研究采用整車沖擊度J作為評價指標。沖擊度是整車前進加速度的變化率(m/s3),之所以選擇沖擊度作為整車駕駛性能的評價指標,是因為沖擊度可以把由于道路條件引起的跳躍和顛簸加速度干擾排除在外,而且容易與人體的主觀感受同步,能真實地反映車輛的駕駛性能[15]。
由汽車理論可知,汽車的行駛方程為
(7)
Fj=δm·du/dt
(8)
其中:Fi為坡道阻力;Ff為滾動阻力;Fw為空氣阻力;Fj為加速阻力;Ft為驅動動力;m為車輛質量;u為車輛行駛速度;δ為車輛旋轉質量換算系數(δ>1)[16]。由沖擊度J的定義
(9)
有
(10)
假設車輛啟動過程中,空氣阻力、滾動阻力、坡道阻力保持不變,則
(11)
其中:ig為變速箱傳動比;i0為主減速比;ηT為傳動系效率;r為車輪半徑;Tt為變速器輸出軸轉矩。在Matlab/Simulink中建立如圖17所示的整車電動機啟動仿真模型。仿真選用車輛參數為:整車總質量m=3 900 kg,主減速比i0=4.52,變速器傳動比ig=1.63,輪胎半徑r=0.363 m,車輛旋轉質量換算系數δ=1.05,機械效率ηT=0.90。
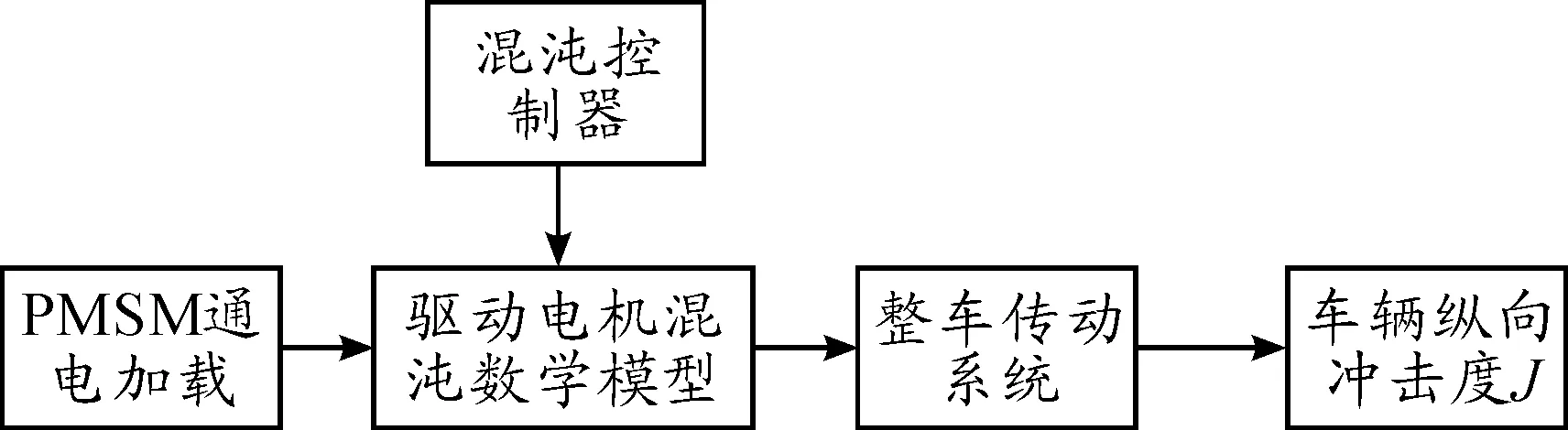
圖17 并聯混合動力汽車以電機起動時的模型
運行仿真模型,可得電機混沌現象在控制前后對整車以電機啟動方式所產生沖擊度J的改善情況,如圖18所示。為便于研究,在20 s時進行混沌現象的控制。
由圖18可以看出:由于整車是以PMSM電機起步,電機混沌現象會使其輸出轉矩發生不規則波動,進而影響整車起動過程中的沖擊度。在電機混沌現象得到控制前后,整車起動過程中的沖擊度J由最大0.02 m/s3下降到0.001 m/s3,提高了整車起動過程的平順性。
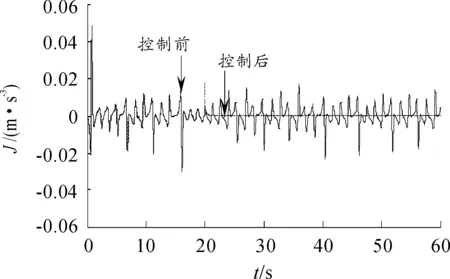
圖18 電機混沌控制前后對整車沖擊度J的影響對比分析
5 硬件在環(HIL)試驗驗證
電機控制系統極其復雜,尤其是并聯混合動力汽車在故障和極限條件下進行的測試,對于整車的性能開發尤為重要。如果采用真實的整車作為試驗對象進行測試,不僅需要齊備的測試人員和硬件設備,還需要大量的資金支持,而且測試周期長,試驗的可重復性差。另一方面,離線仿真受到建模技術的限制,也無法真實反映系統的實時特性[17]。
基于dSPACE的硬件在環仿真系統,其控制算法的載體是控制器實物,通過相應的接口管理系統與處理器中的數字模型聯系起來,可以完全模擬整車在實際運行中所需的各種行駛工況。dSPACE 以Matlab/Simulink 為基礎,完成控制系統開發過程及作為測試的工作平臺,能夠與Matlab/Simulink實現完全無縫連接。圖19為試驗平臺,圖20為在HIL中當電機參數采用本文設定的值時電機的轉速隨時間變化情況,可見這時電機已發生混沌現象。

圖19 基于dSPACE的硬件在環試驗平臺
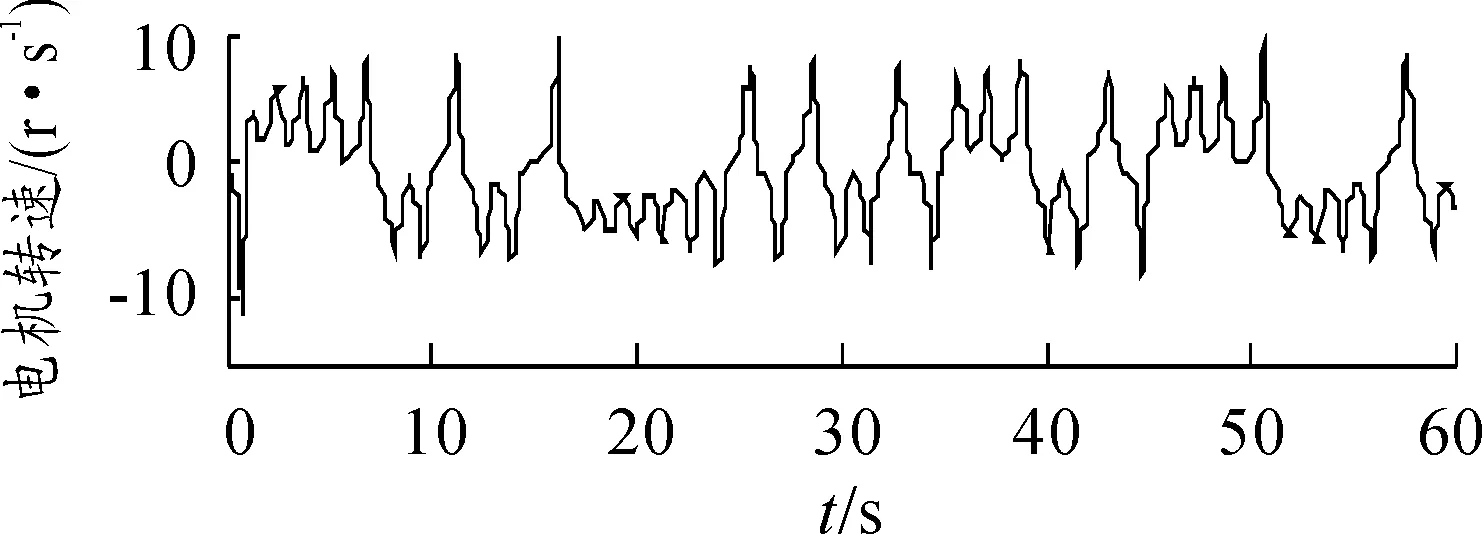
圖20 HIL中電機運行發生混沌現象
dSPACE 實時系統主要包括可人性化試驗與調試的軟件環境ControlDesk,擁有快捷便利的實時代碼生成與下載以及快速計算能力的硬件系統(包括處理器、I/O接口等)等。圖21為基于dSPACE的硬件在環仿真平臺基本原理。試驗臺操作軟件ControlDesk能夠綜合管理試驗過程,通過它可以建立用戶虛擬儀表,實現變量和參數的可視化管理以及實時硬件圖形化管理等[18-19]。實時接口RTI連接dSPACE實時系統與Matlab/Simulink。實時工作間RTW實現從Simulink模型到dSPACE實時硬件代碼的無縫自動下載。由圖1整車動力總成協調控制策略可知,發動機在整車起步過程中并不工作,只由PMSM電機提供啟動力矩。將模型下載到dSPACE組件系統中進行實時運算分析,結果如圖22所示。
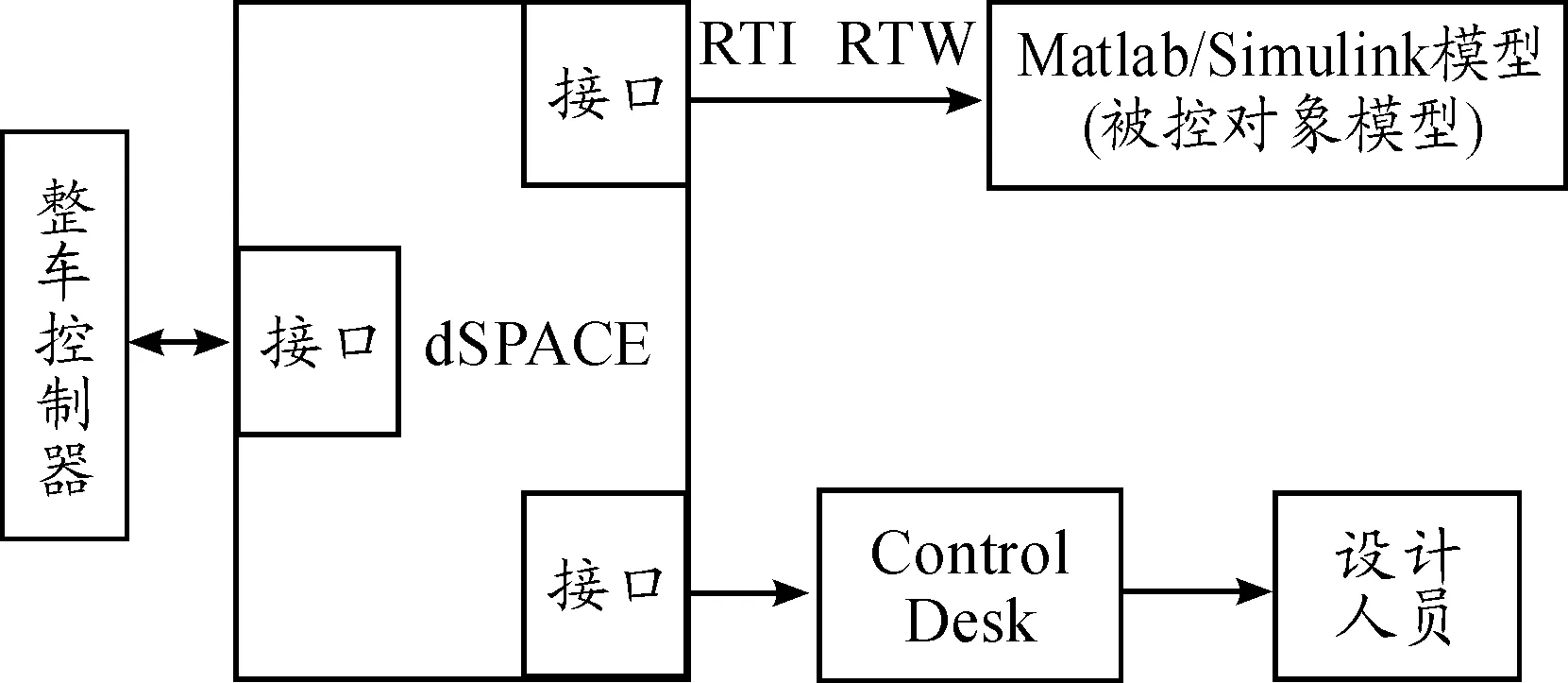
圖21 基于dSPACE的硬件在環試驗平臺原理
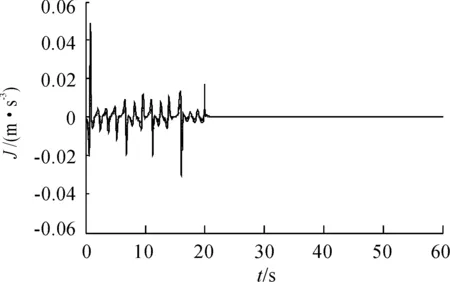
圖22 離線仿真與試驗結果對比
由圖22的試驗與仿真結果對比表明:基于dSPACE的硬件在環試驗結果與離線仿真結果有8%左右的偏差,但是偏差處在合理的范圍內,且HIL試驗結果顯示整車沖擊度J最終被控制為零。這表明本文所設計的模糊反饋控制器是合理有效的。
6 結束語
針對電機運行中因電機定子溫度升高從而導致電機自身參數σ、γ發生改變的情況,結合反饋控制與模糊控制的優點,設計了模糊反饋控制器以抑制電機的混沌現象。對車輛沖擊度產生的機理進行分析,以整車沖擊度J作為電機混沌現象控制的評價指標。由仿真結果得知整車沖擊度J由最大0.02 m/s3降到0.001 m/s3,驅動電機在提供整車啟動力矩時所產生的混沌現象得到了很好的控制,提高了車輛起動過程的平順性。硬件在環試驗(HIL)結果與離線仿真結果有8%左右的偏差,但是偏差處在合理的范圍內,驗證了本文所設計的混沌控制器的有效性。
[1] 李東.永磁同步電機的混沌控制方法研究[D].重慶:重慶大學,2008.
[2] 郭彥嶺.永磁同步電機的混沌控制研究[D].天津:天津科技大學,2010.
[3] Jackson E A,Hubler A W.Periodic entrainment of chaotic logistic map dynamics[J].Physica D,1990,44(3):407-420.
[4] Ott E,Grebogi C,Yorke J A.Controlling chaos[J].Phys Rev Lett,1990,64(1):1196-1199.
[5] 張欣.并聯式混合動力電動汽車動力總成控制策略的仿真研究[J].汽車工程,2005,27(2):141-145.
[6] 陳萍.并聯混合動力汽車動力總成控制策略的仿真研究[D].長春:吉林大學,2007.
[7] 姚廣路.車輛電力驅動系統電機混沌特性及實驗研究[D].北京:北京交通大學,2012.
[8] 賀莉.基于Matlab的永磁直線同步電機混沌系統研究[D].鄭州:鄭州大學,2010.
[9] 張曉磊.基于ADVISOR2002的并聯混合動力汽車轉矩分配策略研究[D].秦皇島:燕山大學,2014.
[10]翟瑞彩,謝偉松.數值分析[M].天津:天津大學出版社,2000:167-172.
[11]楊宗軍,王莉娜.表貼式永磁同步電機的多參數在線辨識[J].電工技術學報,2014,29(3):112-114.
[12]李云鋼,常文森.磁浮列車的模糊反饋控制[J].模糊系統與數學,1998,12(1):54-59.
[13]張永兵,李雙蓓,吳炯,等.壓電變摩擦阻尼結構的模糊控制[J].廣西大學學報:自然科學版,2009,34(1):17-21.
[14]唐斌.混沌系統研究與應用[D].大連:大連交通大學,2012.
[15]張俊智.混合動力電動汽車沖擊度的試驗[J].機械工程學報,2008,44(4):87-91.
[16]余志生.汽車理論[M].北京:機械工業出版社,2011:2-18.
[17]李長文,張付軍,黃英,等.基于dSPACE系統的電控單元硬件在環發動機控制仿真研究[J].兵工學報,2004,25(4):402-406.
[18]黃家才,張玎橙,施昕昕.基于復合積分滑模的永磁同步電機硬件在環位置控制[J].電機與控制學報,2014(12):108-114.
[19]林潛.永磁同步電機驅動系統的硬件在環半實物仿真平臺研究[D].北京:北京交通大學,2014.
(責任編輯 劉 舸)
PMSM Chaos and Its Control During Parallel Hybrid Electric Vehicle Starting Process
LU Wen-chang1, LI Sai-sai1, YUAN Chao-chun1, CHEN Long1, WANG Ruo-fei2
(1.Jiangsu University, Zhenjiang 212013, China;2.Chery New Energy Automobile Technology Co., Ltd., Wuhu 241002, China)
During the start-up process of a parallel hybrid electric vehicle, if the drive motor (PMSM) is in sudden load conditions, and the motor parameters are within a certain range, then the motor will produce chaos phenomenon. Chaos phenomenon not only causes an adverse effect on the life of the motor itself, but also resulting in the occurrence of the unstable situation of the vehicle and great harm happened to its own drive parts caused by more extremely unstable and volatile output to the transmission system after being in combination with the transmission of the vehicle. In ADVISOR2002 software, with the effect of temperature changes on the rotor permanent magnet, the article discussed trends of the motor stator resistanceRS, winding inductance L and permanent magnet fluxψrunder the ECE-EUDC cycle conditions. In terms of the impact of the three parameters discussed above and based on the state feedback and fuzzy control theory, a chaos controller was to be designed in this paper, and after that we used vehicle jerkJas the indicator, and the simulation results were also be given. Simulation results show that the vehicle J dropped from a maximum of 0.02 to 0.001 (m/s3). Finally, we used hardware in the loop (HIL) test to verify the effectiveness of the controller designed by this paper.
parallel hybrid electric vehicle; PMSM; chaos control; vehicle jerk J; HIL
2015-03-27 基金項目:國家自然科學基金資助項目(51305167)
陸文昌(1957—),男,江蘇無錫人,博士,副教授,主要從事電子控制研究;通訊作者 李賽賽(1991—),男,安徽阜陽人,碩士研究生,主要從事混合動力汽車驅動電機混沌現象的研究。
陸文昌,李賽賽,袁朝春,等.并聯混合動力汽車起動過程中PMSM混沌現象及其控制研究[J].重慶理工大學學報:自然科學版,2015(9):30-37.
format:LU Wen-chang, LI Sai-sai, YUAN Chao-chun, et al.PMSM Chaos and Its Control During Parallel Hybrid Electric Vehicle Starting Process[J].Journal of Chongqing University of Technology:Natural Science,2015(9):30-37.
10.3969/j.issn.1674-8425(z).2015.09.005
U469.72
A
1674-8425(2015)09-0030-08